Cálculo Vectorial
INTERACTIVO
Juan Guillermo Rivera Berrío
Institución Universitaria Pascual Bravo
![]()
Elena E. Álvarez Saiz
Universidad de Cantabria


Fondo Editorial Pascual Bravo
Medellín
2020
Título de la obra:
Cálculo Vectorial
Interactivo
Autores:
Juan Guillermo Rivera Berrío
Elena Esperanza Álvarez Saiz
Diseño del libro: Juan Guillermo Rivera Berrío
Código JavaScript para el libro: Joel Espinosa Longi, IMATE, UNAM.
Recursos interactivos: DescartesJS
Fuentes: Lato y UbuntuMono
Fórmulas matemáticas: $\KaTeX$
Obra derivada del libro Calculus Volume 3 de:
Gilbert Strang (Massachusetts Institute of Technology)
Edwin “Jed” Herman (University of Wisconsin-Stevens Point)
ISBN: 978-958-52963-1-2
Este libro digital interactivo se ha diseñado con fundamento en la filosofía del Proyecto Descartes: "Trabajando altruistamente por la comunidad educativa de la aldea global", que sólo busca desarrollar contenidos educativos para el provecho de la comunidad académica, esperando únicamente como retribución el uso y difusión de estos contenidos. El contenido del libro, al igual que los objetos interactivos se han diseñado de tal forma que se puedan leer en ordenadores y dispositivos móviles sin necesidad de instalar ningún programa o plugin. El libro se puede descargar para su uso en local sin dependencia con la red. Algunos de los objetos interactivos se han diseñado con el Editor DescartesJS.
El contenido del libro se basa en un recurso de OpenStax, organización sin fines de lucro de la Universidad de Rice, cuya misión, similar a la nuestra, es mejorar el acceso de los estudiantes a la educación. El libro corresponde al Volumen 3 de Cálculo, que cubre ecuaciones paramétricas y coordenadas polares, vectores, funciones de varias variables, integración múltiple y ecuaciones diferenciales de segundo orden.
Este libro de texto "Cálculo Vectorial" se ha trabajado para hacer que el cálculo sea interesante y accesible para los estudiantes, manteniendo el rigor matemático inherente a la asignatura. Con este objetivo en mente, el contenido se ha desarrollado y organizado para proporcionar una progresión lógica de conceptos fundamentales a conceptos más avanzados, basándose en lo que los estudiantes ya han aprendido y enfatizando en las conexiones entre temas y entre teoría y aplicaciones. El objetivo es permitir que los estudiantes no solo reconozcan los conceptos, sino que trabajen con ellos de manera que sean útiles en cursos posteriores y carreras futuras. La organización y las características pedagógicas fueron desarrolladas y examinadas con comentarios de educadores matemáticos dedicados al proyecto.
Las derivaciones y explicaciones se basan en años de experiencia en el aula por parte de profesores de cálculo desde hace mucho tiempo, luchando por un equilibrio de claridad y rigor que haya demostrado ser exitoso con sus estudiantes. El libro incluye evaluaciones al final de cada apartado para que los estudiantes puedan aplicar lo que han aprendido a través de problemas de práctica. Muchos ejercicios están marcados con una [T] para indicar que son adecuados para la solución por tecnología, incluidas las calculadoras o los sistemas de álgebra computacional (CAS), como GeoGebra. Las respuestas para los ejercicios seleccionados están disponibles para los numerales impares.
El texto original, desarrollado por Gilbert Strang y Edwin “Jed” Herman, ha sido publicado en versiones html y pdf. Esta obra derivada, en español y como libro interactivo, creada por Rivera J.G. y Álvarez E.E., presenta las siguientes aportaciones: traducción al español, diseño en formato ebook, incorporación de 81 objetos interactivos de aprendizaje, 66 de ellos diseñados con el editor DescartesJS y 15 con GeoGebra.
Para evitar, al máximo, la dependencia con la conectividad en la red, las expresiones matemáticas se han construido recurriendo al API de $\KaTeX$.
En otra obra, que hemos titulado "Curvas y superficies paramétricas", puedes encontrar un gran cantidad de curvas y superficies, de las cuales hemos seleccionado la miscelánea diseñada por Ildefonso Fernández Trujillo, José Román Galo Sánchez y Ángel Cabezudo Bueno como motivación de este libro:
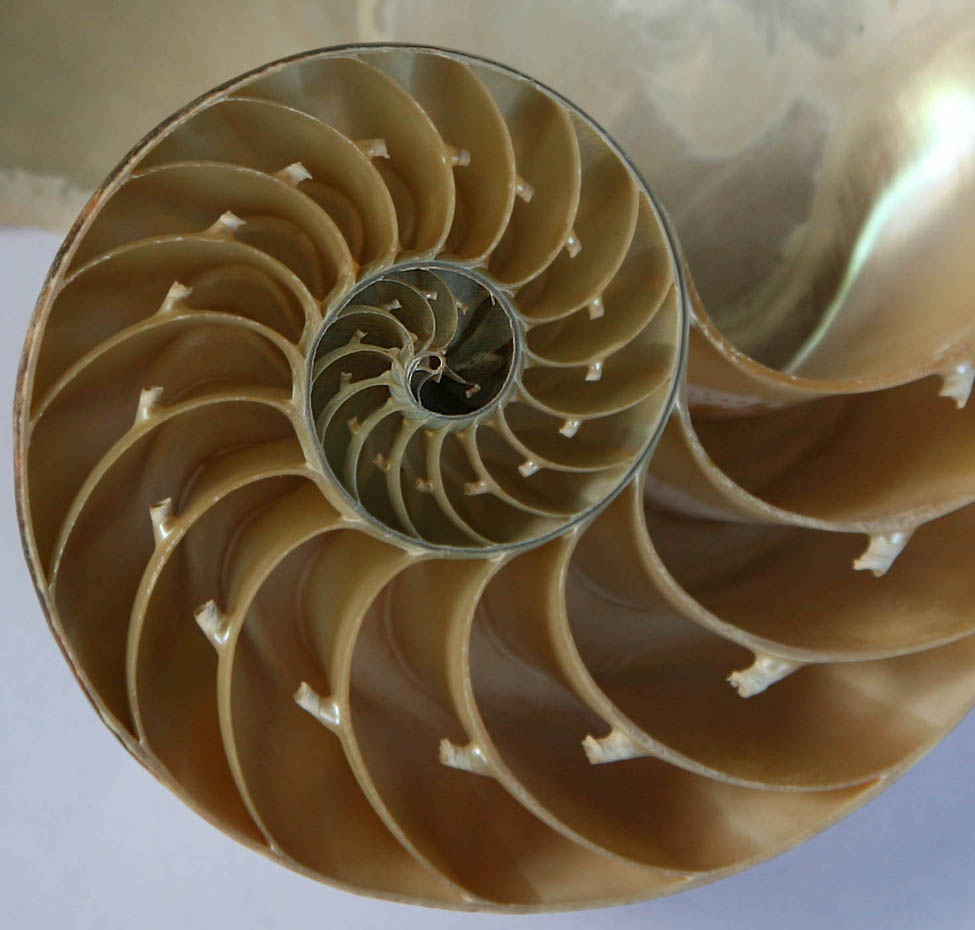
El nautilus de cámara es una criatura fascinante. Este animal se alimenta de cangrejos ermitaños, peces y otros crustáceos. Tiene una cubierta exterior dura con muchas cámaras conectadas en forma de espiral, y puede retraerse en su cubierta para evitar a los depredadores. Cuando se corta parte de la cáscara se revela una espiral perfecta, con cámaras en su interior que son algo similares a los anillos de crecimiento en un árbol.
La función matemática que describe una espiral se puede expresar utilizando coordenadas rectangulares (o cartesianas). Sin embargo, si cambiamos nuestro sistema de coordenadas a algo que funcione un poco mejor con los patrones circulares, la función se vuelve mucho más sencilla de describir. El sistema de coordenadas polares es adecuado para describir curvas de este tipo.
En este capítulo también estudiamos las ecuaciones paramétricas, que nos brindan una manera conveniente de describir curvas o de estudiar la posición de una partícula u objeto en dos dimensiones en función del tiempo. Usaremos ecuaciones paramétricas y coordenadas polares para describir muchos temas más adelante en este texto.
En esta sección examinamos las ecuaciones paramétricas y sus gráficas. En el sistema de coordenadas bidimensional, las ecuaciones paramétricas son útiles para describir curvas que no son necesariamente funciones. El parámetro es una variable independiente de la que tanto $x$ como $y$ dependen, y a medida que aumenta el parámetro, los valores de $x$ e $y$ trazan un camino a lo largo de una curva plana. Por ejemplo, si el parámetro es $t$ (una opción común), entonces $t$ podría representar el tiempo. Luego, $x$ e $y$ se definen como funciones de tiempo, y $(x(t), y(t))$ puede describir la posición en el plano de un objeto dado a medida que se mueve a lo largo de una trayectoria curva.
Considera la órbita de la Tierra alrededor del Sol. Nuestro año dura aproximadamente 365.25 días, pero para esta discusión usaremos 365 días.
El 1 de enero de cada año, la ubicación física de la Tierra con respecto al Sol es casi la misma, excepto en los años bisiestos, cuando el retraso introducido por los 14 días adicionales de tiempo de órbita se incluye en el calendario. Llamamos al 1 de enero "día 1" del año. Luego, por ejemplo, el día 31 es el 31 de enero, el día 59 es el 28 de febrero y así sucesivamente.
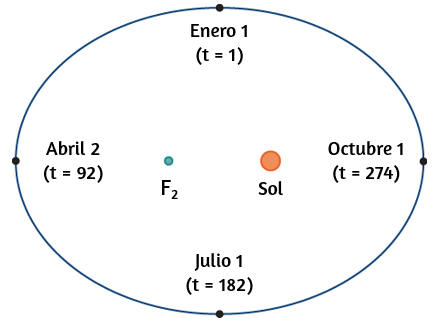
El número del día en un año puede considerarse una variable que determina la posición de la Tierra en su órbita. A medida que la Tierra gira alrededor del Sol, su ubicación física cambia en relación con el Sol. Después de un año completo, estamos de vuelta donde empezamos y comienza un nuevo año. Según las leyes de Kepler sobre el movimiento planetario, la forma de la órbita es elíptica, con el Sol en un foco de la elipse. Estudiamos esta idea con más detalle en las secciones cónicas.
La muestra la órbita de la Tierra alrededor del Sol durante un año. El punto etiquetado $F_2$ es uno de los focos de la elipse; el otro foco está ocupado por el sol.
Si superponemos los ejes de coordenadas sobre este gráfico, entonces podemos asignar pares ordenados a cada punto de la elipse (). Luego, cada valor de $x$ en el gráfico es un valor de posición en función del tiempo, y cada valor de $y$ también es un valor de posición en función del tiempo. Por lo tanto, cada punto en el gráfico corresponde a un valor de la posición de la Tierra en función del tiempo.

Podemos determinar las funciones para $x(t)$ y $y(t)$, parametrizando así la órbita de la Tierra alrededor del Sol. La variable $t$ se llama parámetro independiente y, en este contexto, representa el tiempo relativo al comienzo de cada año.
Una curva en el plano $(x,y)$ puede representarse paramétricamente. Las ecuaciones que se utilizan para definir la curva se denominan ecuaciones paramétricas.
Observa en esta definición que $x$ e $y$ se usan de dos maneras. La primera es como funciones de la variable independiente $t$. Como $t$ varía en el intervalo $I$, las funciones $x(t)$ e $y(t)$ generan un conjunto de pares ordenados $(x,y)$. Este conjunto de pares ordenados genera la gráfica de las ecuaciones paramétricas. En este segundo uso, para designar los pares ordenados, $x$ e $y$ son variables. Es importante distinguir las variables $x$ e $y$ de las funciones $x(t)$ y $y(t)$.

Graficando una curva definida paramétricamente
Dibuja las curvas descritas por las siguientes ecuaciones paramétricas:
a. $x(t) = t - 1,\; y(t) = 2t + 4,\; -3 ≤ t ≤ 2$
b. $x(t) = t^2 - 3,\; y(t) = 2t + 1,\; -2 ≤ t ≤ 3$
c. $x(t) = 4cost, \;y(t) = 4sent,\; 0 ≤ t ≤\; 2π$
Haz clic en el siguiente botón, para ver la solución al ejercicio.

Dibuja la curva descrita por las ecuaciones paramétricas:
$$x(t) = 3t + 2,\; y (t) = t^2 - 1,\; -3 ≤ t ≤ 2$$Sugerencia: Haz una tabla de valores para $x(t)$ y $y(t)$ usando valores de $t$ de $-3$ a $2$.
Para comprender mejor la gráfica de una curva representada de manera paramétrica, es útil reescribir las dos ecuaciones como una sola ecuación que relaciona las variables $x$ e $y$. Luego podemos aplicar cualquier conocimiento previo de ecuaciones de curvas en el plano para identificar la curva. Por ejemplo, las ecuaciones que describen la curva plana en la parte b del primer ejercicio, son:
$$x(t) = t^2 - 3,\; y(t) = 2t + 1,\; -2 ≤ t ≤ 3$$Resolviendo la segunda ecuación para t, obtenemos:
$$t = \frac{y - 1}{2}$$Este resultado puede ser sustituido en la primera ecuación:
$$x=\left(\frac{y-1}{2}\right)^2 - 3 = \frac{y^2-2y+1}{4} -3 = \frac{y^2-2y-11}{4}$$Esta ecuación describe $x$ como una función de $y$. Estos pasos dan un ejemplo de eliminación del parámetro. La gráfica de esta función es una parábola que se abre hacia la derecha. Recuerda que la curva plana comenzó en $(1, -3)$ y terminó en $(6, 7)$. Estas terminaciones se debieron a la restricción del parámetro $t$.
Eliminando el parámetro
Elimina el parámetro para cada una de las curvas planas descritas por las siguientes ecuaciones paramétricas y describe el gráfico resultante.
$a.\; x(t) = \sqrt{2t + 4},\; y(t) = 2t + 1,\; -2 ≤ t ≤ 6\\ b.\; x(t) = 4cost,\; y(t) = 3sent,\; 0 ≤ t ≤ 2π$
Elimina el parámetro para la curva plana definida por las siguientes ecuaciones paramétricas y describe el gráfico resultante.
$$x(t) = 2 + \frac{3}{t},\; y(t) = t - 1,\; 2 ≤ t ≤ 6$$Sugerencia: Resuelve una de las ecuaciones para t y sustitúyela en la otra ecuación.
Hasta ahora hemos visto el método de eliminar el parámetro, asumiendo que conocemos un conjunto de ecuaciones paramétricas que describen una curva plana. ¿Qué pasa si nos gustaría comenzar con la ecuación de una curva y determinar un par de ecuaciones paramétricas para esa curva? Esto es ciertamente posible, y de hecho es posible hacerlo de muchas maneras diferentes para una curva dada. El proceso se conoce como parametrización de una curva.
Parametrizando una curva
Encuentra dos pares de ecuaciones paramétricas diferentes para representar la gráfica de $y = 2x^2 - 3$.
Haz clic en el botón para observar la solución:
Encuentra dos conjuntos diferentes de ecuaciones paramétricas para representar la gráfica de $y = x^2 + 2x$.
Sugerencia: Sigue los pasos del ejercicio anterior. Recuerda que tenemos libertad para elegir la parametrización de $x(t)$.
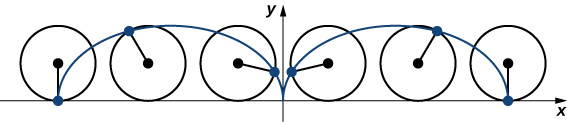
Imagínate paseando en bicicleta por el país. Los neumáticos permanecen en contacto con la carretera y giran en un patrón predecible. Ahora supongamos que una hormiga muy decidida está cansada después de un largo día y quiere llegar a casa. Así que se cuelga del lado del neumático y consigue un viaje gratis. El camino que esta hormiga recorre por un camino recto se llama cicloide (). Una cicloide generada por un círculo (o rueda de bicicleta) de radio a, está dada por las ecuaciones paramétricas:
$$x(t) = a(t - sen t),\; y(t) = a(1 - cos t).$$Para ver por qué esto es cierto, considera el camino que toma el centro de la rueda. El centro se mueve a lo largo del eje $x$ a una altura constante igual al radio de la rueda. Si el radio es $a$, entonces las coordenadas del centro pueden ser dadas por las ecuaciones
$$x(t) = at,\; y(t) = a$$para cualquier valor de $t$. A continuación, considera la hormiga, que gira alrededor del centro a lo largo de un camino circular. Si la bicicleta se mueve de izquierda a derecha, las ruedas giran en el sentido de las agujas del reloj.
Una posible parametrización del movimiento circular de la hormiga (en relación con el centro de la rueda) está dada por
$$x(t) = -asen t, y(t) = - acos t.$$(El signo negativo es necesario para invertir la orientación de la curva. Si el signo negativo no estuviera allí, tendríamos que imaginar la rueda girando en sentido contrario a las agujas del reloj). Sumar estas ecuaciones juntas da las ecuaciones para la cicloide.
$$x(t) = a(t - sen t), \;y(t) = a(1 - cos t).$$Este tipo de curva recibió el nombre de "Helena de los geométras"Véase en Carrillo & Llamas, el trazado de algunas curvas (Revista Suma, 1999).. Pese a que fue Mersenne, en 1615, quien la define como cicloide, su estudio fue de mucho interés para Galileo, Torricelli, Fermat, Descartes, Huygens y Pascal (Ibid).
Dado su gran interés para estos ilustres matemáticos, vamos a describir su construcción geométrica y, posteriormente, las ecuaciones paramétricas que la definen.
De la miscelánea (Ruleta cicloidal), diseñada por Rita Jiménez Igea, Ildefonso Fernández Trujillo y Ángel Cabezudo Bueno, encontramos que,
Una ruleta cicloidal es una curva plana que describe la trayectoria de un punto vinculado a una circunferencia, llamada generatriz, que rueda tangencialmente sin deslizarse sobre otra curva plana llamada directriz. Según sea la curva directriz sobre la que rueda la circunferencia, la ruleta cicloidal recibe nombres diferentes. Se llama cicloide a la ruleta cicloidal que rueda sobre una recta. El punto vinculado a la circunferencia puede ser interior, exterior o estar en la circunferencia; en este último caso se dice que la cicloide es normal.
En la escena interactiva de la página siguiente, al pulsar el botón animar/parar, vemos cómo se genera la cicloide normal. El punto vinculado a la circunferencia es el punto $P$ que inicialmente hace contacto con la recta.
Supongamos ahora que la rueda de la bicicleta no viaja por una carretera recta, sino que se mueve por el interior de una rueda más grande, como se muestra en la . En este gráfico, el círculo verde se desplaza alrededor del círculo azul en sentido contrario a las agujas del reloj. Un punto en el borde del círculo verde traza el gráfico rojo, que se llama hipocicloide.
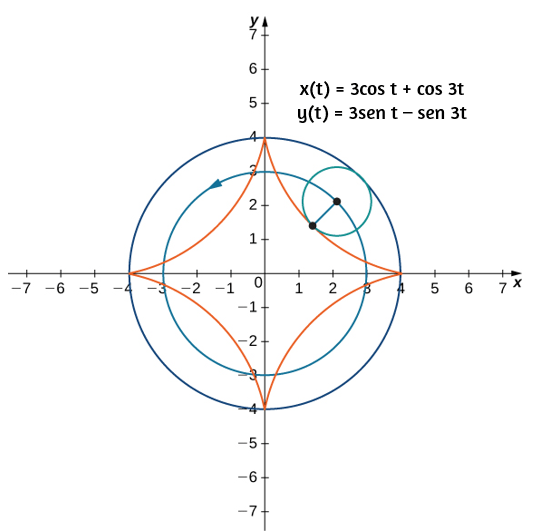
Otra curva de gran interés es la hipocicloide. Las ecuaciones paramétricas generales para una hipocicloide son:
$$x(t) = (a - b)cost + bcos\left(\frac{a - b}{b}\right)t\\ y(t) = (a - b)sent - bsen\left(\frac{a - b}{b}\right)t$$Estas ecuaciones son un poco más complicadas, pero la deducción es algo similar a las ecuaciones para la cicloide. En este caso, asumimos que el radio del círculo más grande es $a$ y el radio del círculo más pequeño es $b$. Luego, el centro de la rueda se desplaza a lo largo de un círculo de radio $a - b$. Este hecho explica el primer término en cada ecuación anterior. El período de la segunda función trigonométrica tanto en $x(t)$ como en $y(t)$ es igual a $\frac{2πb}{a - b}$
En la siguiente escena interactiva, observa cómo se generan las hipocicloides, a partir de punto P de una circunferencia de radio $b$ que rota interiormente y sin deslizamiento sobre otra circunferencia de radio $a$.
La relación $\frac{a}{b}$ está relacionada con el número de cúspides en el gráfico (las cúspides son las esquinas o los extremos puntiagudos del gráfico), como se ilustra en la . Esta relación puede llevar a algunos gráficos muy interesantes, dependiendo de si la relación es racional o no. La figura corresponde a $a = 4$ y $b = 1$. El resultado es un hipocicloide con cuatro cúspides, llamada astroide.
Inicialmente, la escena presenta la relación $\frac{a}{b} = 3$, que corresponde a una hipocicloide llamada deltoide, cambia el valor de $a$ por 4 y observarás la astroide. En la escena interactiva puedes obtener otras posibilidades.
Ahora, haz clic en el botón Inicio para cambiar el valor de $t$ a cero y usas el botón animar/parar, para que observes la construcción geométrica de la hipocicloide, puedes hacerlo más lento con el pulsador $t$.
En la , presentamos algunas de esas posibilidades para que las reproduzcas en el interactivo. Las dos últimas hipocicloides tienen valores irracionales para $a/b$. En estos casos, los hipocicloides tienen un número infinito de cúspides, por lo que nunca vuelven a su punto de partida, por ello, debes recurrir a los pulsadores $t$ y zoom. Estos son ejemplos de lo que se conoce como curvas de relleno de espacio.

Muchas curvas planas en matemáticas llevan el nombre de las personas que las investigaron por primera vez, como el folio de Descartes o la espiral de Arquímedes. Sin embargo, quizás el nombre más extraño para una curva es la bruja de Agnesi. ¿Por qué una bruja?
Maria Gaetana Agnesi (1718-1799) fue una de las pocas mujeres matemáticas reconocidas en la Italia del siglo XVIII. Escribió un libro popular sobre geometría analítica, publicado en 1748, que incluía una curva interesante que había estudiado Fermat en 1630. El matemático Guido Grandi mostró en 1703 cómo construir esta curva, que más tarde llamó la "versoria", una Término latino para una cuerda usada en la navegación. Agnesi usó el término italiano para esta cuerda, "versiera", pero en latín, esta misma palabra significa "duende femenino". Cuando el libro de Agnesi se tradujo al inglés en 1801, el traductor usó el término "bruja" para la curva, en lugar de la cuerda. El nombre "bruja de Agnesi" se ha pegado desde entonces.
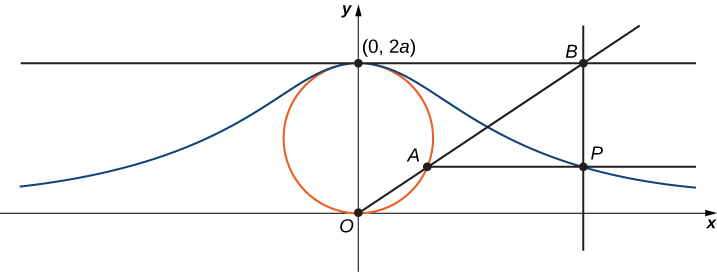
La bruja de Agnesi es una curva definida de la siguiente manera: Comienza con un círculo de radio $a$ para que los puntos $(0,0)$ y $(0,2a)$ sean puntos en el círculo (). Dejemos que $O$ denote el origen. Elige cualquier otro punto $A$ en el círculo y traza la recta secante $OA$. Sea $B$ el punto en el cual la recta OA interseca la recta horizontal a través de $(0,2a)$. La recta vertical a través de $B$ interseca la recta horizontal a través de $A$ en el punto $P$. A medida que el punto $A$ varía, la trayectoria que recorre el punto $P$ es la curva de la bruja de Agnesi para el círculo dado.
Las curvas de la bruja de Agnesi tienen aplicaciones en física, que incluyen el modelado de ondas de agua y la distribución de líneas espectrales.
En la teoría de la probabilidad, la curva describe la función de densidad de probabilidad de la distribución de Cauchy. En este apartado parametrizarás estas curvas.
El objetivo de este apartado es parametrizar a la bruja utilizando $θ$ como parámetro. Para hacer esto, escribe ecuaciones para $x$ e $y$ en términos de solo $θ$.
En la siguiente escena interactiva hemos emulado la . En esta escena puedes generar la curva de la bruja de Agnesi aumentando el valor del parámetro $t$, también puedes cambiar el valor del radio.
Anteriormente en esta sección, observamos las ecuaciones paramétricas de una cicloide, que es el camino que un punto en el borde de una rueda traza a medida que la rueda gira a lo largo de un camino recto. En este proyecto, observamos dos variaciones diferentes de la cicloide, denominadas cicloides acortadas (curtata) y alargadas (prolata).
Primero, revisemos la derivación de las ecuaciones paramétricas para una cicloide. Recordemos que consideramos una hormiga tenaz que intenta llegar a casa colgada del borde de un neumático de bicicleta. Hemos asumido que la hormiga se subió al neumático en el borde, donde el neumático toca el suelo.
A medida que la rueda gira, la hormiga se mueve con el borde del neumático ().
Como hemos discutido, tenemos mucha flexibilidad al parametrizar una curva. En este caso, dejamos que nuestro parámetro $t$ represente el ángulo por el que ha girado el neumático. Al observar la Figura, vemos que después de que el neumático haya girado en un ángulo $t$, la posición del centro de la rueda, $C = (x_C, y_C)$, viene dada por
$$x_C = at\; e\; y_C = a$$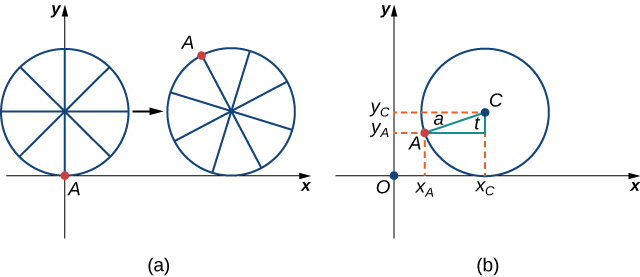
Además, al dejar que $A = (x_A, y_A)$ denote la posición de la hormiga, notamos que
$$x_C - x_A = asent \;e\; y_C - y_A = acost$$Entonces
$$x_A = x_C - asent = at - asent = a(t - sent)$$Observa que estas son las mismas representaciones paramétricas que teníamos antes, pero ahora hemos asignado un significado físico a la variable paramétrica $t$.
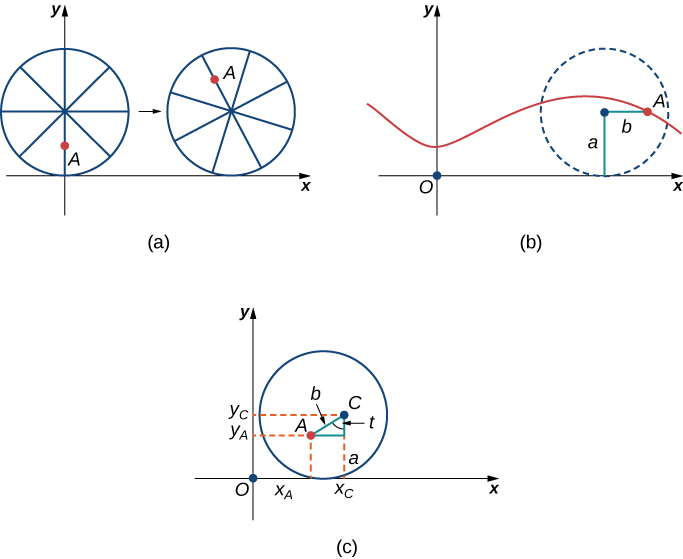
Después de un tiempo, la hormiga se está mareando al dar vueltas y vueltas en el borde del neumático. Entonces sube uno de los radios hacia el centro de la rueda. Al subir hacia el centro de la rueda, la hormiga ha cambiado su trayectoria de movimiento. La nueva ruta tiene menos movimiento hacia arriba y hacia abajo y se denomina cicloide curtata (). Como se muestra en la figura, permitimos que $b$ denote la distancia a lo largo del radio desde el centro de la rueda hasta la hormiga. Como antes, dejamos que $t$ represente el ángulo por el que ha girado el neumático. Además, permitimos que $C = (x_C, y_C)$ represente la posición del centro de la rueda y $A = (x_A, y_A)$ represente la posición de la hormiga.
Una vez que la cabeza de la hormiga se aclara, se da cuenta de que el ciclista ha dado un giro y ahora se está alejando de su casa. Así que se deja caer del neumático de la bicicleta y mira a su alrededor. Afortunadamente, hay un conjunto de vías de tren cercanas, dirigidas de regreso en la dirección correcta. Así que la hormiga se dirige a las vías del tren para esperar.
Al cabo de un rato, pasa un tren en dirección correcta, y logra saltar y simplemente atrapar el borde de la rueda del tren (¡sin ser aplastada!).
La hormiga todavía está preocupada por marearse, pero la rueda del tren está resbaladiza y no tiene radios para trepar, por lo que decide simplemente aferrarse al borde de la rueda y esperar lo mejor. Ahora, las ruedas del tren tienen una pestaña para mantener la rueda funcionando en las vías.
Entonces, en este caso, dado que la hormiga cuelga del borde de la pestaña, la distancia desde el centro de la rueda a la hormiga es en realidad mayor que el radio de la rueda ().
La configuración aquí es esencialmente la misma que cuando la hormiga subió el radio en la rueda de la bicicleta. Dejamos que $b$ denote la distancia desde el centro de la rueda a la hormiga, y dejamos que $t$ represente el ángulo por el que ha girado el neumático. Además, dejamos que $C = (x_C, y_C)$ represente la posición del centro de la rueda y $A = (x_A, y_A)$ represente la posición de la hormiga ().
Cuando la distancia desde el centro de la rueda a la hormiga es mayor que el radio de la rueda, su trayectoria de movimiento se llama una cicloide prolata.
Tanto las cicloides curtatas como prolatas, son denominadas trocoides. En la escena interactiva de la
Esta curva fue estudiada por Durero en 1525 y Rømer en 1674. Su nombre se deriva del griego trokhos: rueda.

En la siguiente escena interactiva puedes observar una cicloide alargada, reduce el valor de $a$ para obtener una cicloide acortada.

A continuación, encontrará varios ejercicios para que confrontes lo aprendido. Lo ejercicios correspondientes a numerales impares, presentan la solución.
 Para los siguientes ejercicios, dibuja las curvas eliminando el parámetro $t$. Indica la orientación de la curva.
Para los siguientes ejercicios, dibuja las curvas eliminando el parámetro $t$. Indica la orientación de la curva.
En el siguiente ejercicio, elimina el parámetro y dibuja los gráficos.
Para los siguientes ejercicios, usa la tecnología (CAS o calculadora) para dibujar las ecuaciones paramétricas.
Para los siguientes ejercicios, dibuja las ecuaciones paramétricas eliminando el parámetro. Indica cualquier asíntota del gráfico.
Para los siguientes ejercicios, convierte las ecuaciones paramétricas de una curva en forma rectangular. No es necesario ningún boceto. Condición del dominio de la forma rectangular.
Para los siguientes ejercicios, los pares de ecuaciones paramétricas representan rectas, parábolas, círculos, elipses o hipérbolas. Nombra el tipo de curva básica que representa cada par de ecuaciones.
Para los siguientes ejercicios, usa una utilidad gráfica para graficar la curva representada por las ecuaciones paramétricas e identificar la curva a partir de su ecuación.
La trayectoria del paquete viene dada por $x = 100t,\; y = -4.9t^2 + 4000,\; t ≥ 0$ donde el origen es el punto en el suelo directamente debajo del plano en el momento del lanzamiento.
¿Cuántos metros horizontales antes del objetivo se debe lanzar el paquete para golpear el objetivo?
haz $a = 1, \;b = 2, \;c = 1$.
Esta curva es conocida como la bruja de Agnesi.
Ahora que hemos introducido el concepto de una curva parametrizada, nuestro siguiente paso es aprender cómo trabajar con este concepto en el contexto del cálculo. Por ejemplo, si conocemos una parametrización de una curva dada, ¿es posible calcular la pendiente de una recta tangente a la curva? ¿Qué tal la longitud de arco de la curva? ¿O el área bajo la curva?
Otro escenario: supongamos que nos gustaría representar la ubicación de una pelota de béisbol después de que la pelota deja la mano de un lanzador. Si la posición de la pelota de béisbol está representada por la curva plana $(x(t), y(t))$, entonces deberíamos poder usar el cálculo para encontrar la velocidad de la pelota en cualquier momento dado. Además, deberíamos poder calcular la distancia que ha recorrido esa bola en función del tiempo.
Comenzamos preguntando cómo calcular la pendiente de una recta tangente a una curva paramétrica en un punto. Considera la curva plana definida por las ecuaciones paramétricas.
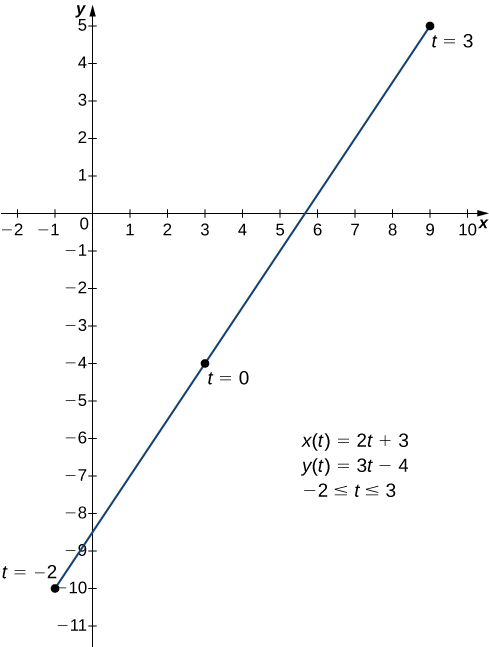
$$x(t) = 2t + 3,\; y(t) = 3t - 4,\; -2 ≤ t ≤ 3.$$La gráfica de esta curva aparece en la . Es un segmento de recta que comienza en $(-1, -10)$ y termina en $(9, 5)$.
Podemos eliminar el parámetro resolviendo primero la ecuación $x(t) = 2t + 3$ para $t$:
Sustituyendo en $y(t)$, obtenemos
$$\begin{aligned} y(t) &= 3t - 4\\ y &= 3\left(\frac{x - 3}{2}\right) - 4\\ y &= \frac{3x}{2} - \frac{9}{2} - 4\\ y &= \frac{3x}{2} - \frac{17}{2} \end{aligned}$$La pendiente de esta recta está dada por $\frac{dy}{dx} = \frac{3}{2}$. Luego calculamos $x'(t)\; e\; y'(t)$. Esto da $x'(t) = 2\; e\; y'(t) = 3$. Ten en cuenta que $\frac{dy}{dx} = \frac{dy/dt}{dx/dt} = \frac{3}{2}$. Esto no es una coincidencia, como se describe en el siguiente teorema.
Considera la curva plana definida por las ecuaciones paramétricas $x = x(t)\; e\; y = y(t)$. Supongamos que $x'(t)\; e\; y'(t)$ existen, y supongamos que $x'(t) ≠ 0$. Entonces la derivada $\frac{dy}{dx}$ viene dada por
$$\frac{dy}{dx} = \frac{dy/dt}{dx/dt} = \frac{y'(t)}{x'(t)} \tag{$1.1$}$$Demostración
Este teorema puede ser probado usando la Regla de la Cadena.
En particular, supón que el parámetro $t$ puede eliminarse, dando como resultado una función diferenciable $y = F(x)$. Entonces $y(t) = F(x(t))$. Diferenciando ambos lados de esta ecuación usando los resultados de la regla de la cadena
$$y'(t) = F'(x(t))x'(t)$$entonces
$$F'(x(t)) = \frac{y'(t)}{x'(t)}$$Pero $F'(x(t)) = \frac{dy}{dx}$, lo que prueba el teorema.
La ecuación se puede utilizar para calcular derivadas de curvas planas, así como puntos críticos. Recuerda que un punto crítico de una función diferenciable $y = f(x)$ es cualquier punto $x = x_0$ tal que $f'(x_0) = 0$ o $f'(x_0)$ no existe. La ecuación da una fórmula para la pendiente de una recta tangente a una curva definida paramétricamente, independiente de si la curva se puede describir mediante una función $y = f(x)$ o no.
Encontrando la derivada de una curva paramétrica
Calcula la derivada $\frac{dy}{dx}$ para cada una de las siguientes curvas planas definidas paramétricamente y ubica los puntos críticos en sus gráficos respectivos.
Calcula la derivada $dy/dx$ para la curva plana definida por las ecuaciones
$$x(t) = t^2 - 4t, \;y(t) = 2t^3 - 6t,\; -2 ≤ t ≤ 3$$y ubicar los puntos críticos en su gráfica.
Sugerencia
Calcula $x'(t)$ e $y'(t)$ y usa la ecuación.
Encuentra una recta tangente
Encuentra la ecuación de la recta tangente a la curva definida por las ecuaciones
$$x(t) = t^2 - 3,\; y(t) = 2t - 1,\; -3 ≤ t ≤ 4,\; \text{cuando } t = 2$$
Luego de haber solucionado el ejercicio, interactúa con la siguiente escena diseñada en GeoGebra:
Encuentra la ecuación de la recta tangente a la curva definida por las ecuaciones
$$x(t) = t^2 - 4t,\; y(t) = 2t^3 - 6t,\; -2 ≤ t ≤ 3, \text{cuando }t = 5$$
Nuestro siguiente objetivo es ver cómo tomar la segunda derivada de una función definida paramétricamente. La segunda derivada de una función $y = f(x)$ se define como la derivada de la primera derivada; es decir,
$$\frac{d^2y}{dx^2}=\frac{d}{x}\left(\frac{dy}{dx}\right)$$Dado que $\frac{dy}{dx} = \frac{dy/dt}{dx/dt^2}$, podemos reemplazar la $y$ en ambos lados de esta ecuación con $\frac{dy}{dx}$. Esto nos da
$$\frac{d^2y}{dx^2}=\frac{d}{dx}\left(\frac{dy}{dx}\right)=\frac{(d/dt)(dy/dx)}{dx/dt} \tag{$1.2$}$$Si conocemos $dy/dx$ como una función de $t$, entonces esta fórmula es sencilla de aplicar.
Encuentra la segunda derivada
Calcula la segunda derivada $\dfrac{d^2y}{dx^2}$ para la curva plana definida por las ecuaciones paramétricas
$$x(t) = t^2 - 3,\; y(t) = 2t - 1,\; -3 ≤ t ≤ 4.$$
Calcula la segunda derivada $d^2y/dx^2$ para la curva plana definida por las ecuaciones
$$x(t) = t^2 - 4t,\; y(t) = 2t^3 - 6t,\; -2 ≤ t ≤ 3$$y ubicar los puntos críticos en su gráfica.
Ahora que hemos visto cómo calcular la derivada de una curva plana, la siguiente pregunta es: ¿Cómo podemos encontrar el área bajo una curva definida paramétricamente? Recuerda el cicloide definido por las ecuaciones $x(t) = t - sent, y(t) = 1 - cos t$.
Supongamos que queremos encontrar el área de la región sombreada en el siguiente gráfico.

Al derivar una fórmula para el área bajo la curva definida por las funciones
$$x = x(t),\; y = y(t),\; a ≤ t ≤ b,$$asumimos que $x(t)$ es diferenciable y comenzamos con una partición igual del intervalo a $≤ t ≤ b$. Supón que $t_0 = a < t_1 < t_2 < ...< t_n = b$ y considera la siguiente gráfica.
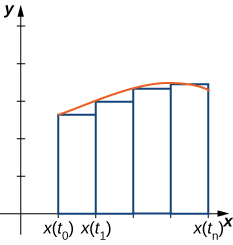
Usamos rectángulos para aproximar el área debajo de la curva. La altura de un rectángulo típico en esta parametrización es $y(x(\bar{t}_i))$ para algún valor $\bar{t}_i$ en el subintervalo $i$, y el ancho se puede calcular como $x(t_i) - x(t_{i - 1})$. Así, el área del rectángulo $i$ está dada por
$$A_i = y(x(\bar{t}_i))(x(t_i) - x(t_{i - 1})).$$Entonces una suma de Riemann para el área es
$$A_n = \sum_{i=1}^n y(x(\bar{t}_i))(x(t_i) - x(t_{i - 1}))$$Multiplicando y dividiendo cada área por $t_i - t_{i - 1}$, obtenemos:
Tomando el límite cuando n se acerca al infinito
$$A = \lim_{n \to{+}\infty}{A_n} = \int_{a}^{b} y(t)x'(t)dt$$Esto nos lleva al siguiente teorema.
Área bajo una curva paramétrica
Considera la curva plana no auto-intersecante definida por las ecuaciones paramétricas
$$x = x(t),\; y = y(t),\; a ≤ t ≤ b$$y supongamos que $x(t)$ es diferenciable. El área bajo esta curva está dada por
$$A = \int_{a}^{b} y(t)x'(t)dt \tag{$1.3$}$$
Encontrando el área bajo una curva paramétrica
Encuentra el área bajo la curva de la cicloide definida por las ecuaciones
$$x(t) = t - sen t,\; y(t) = 1 - cos t,\; 0 ≤ t ≤ 2π$$
La siguiente escena interactiva, permite calcular el área bajo la cicloide. Cambia los límites de integración para obtener otras áreas.
Encuentra el área bajo la curva del hipocicloide definida por las ecuaciones
$$x(t) = 3cos t + cos 3t,\; y(t) = 3sen t - sen 3t,\; 0 ≤ t ≤ π$$
Sugerencia
Usa la ecuación, junto con las identidades $senαsenβ = \frac{1}{2}[cos(α - β) - cos(α + β)]$ y $sen^2t = \frac{1 - cos 2t}{2}$
La hipocicloide del ejercicio es conocida como Astroide (hipocicloide de cuatro ramas). En la siguiente escena interactiva, verifica el cálculo del área en el intervalo $[0, 2π]$ y observa que su construcción es de derecha a izquierda, en la mitad de dicho intervalo.
Además de encontrar el área bajo una curva paramétrica, a veces necesitamos encontrar la longitud del arco de una curva paramétrica. En el caso de un segmento de recta, la longitud del arco es la misma que la distancia entre los puntos finales.
Si una partícula viaja desde el punto $A$ hasta el punto $B$ a lo largo de una curva, entonces la distancia que recorre esa partícula es la longitud del arco. Para desarrollar una fórmula para la longitud del arco, comenzamos con una aproximación por segmentos de recta como se muestra en el siguiente gráfico.

Dada una curva plana definida por las funciones $x = x(t),\; y = y(t),\; a ≤ t ≤ b$, comenzamos dividiendo el intervalo $[a, b]$ en $n$ subintervalos iguales: $t_0 = a < t_1 < t_2 < ... < t_n = b$. El ancho de cada subintervalo viene dado por $Δt = (b - a)/n$. Podemos calcular la longitud de cada segmento de recta:
$$d_1 = \sqrt{(x(t_1)- x(t_0))^2 + (y(t_1)- y(t_0))^2}$$ $$d_2 = \sqrt{(x(t_2)- x(t_1))^2 + (y(t_2)- y(t_1))^2},\; etc.$$Luego los sumamos. Dejamos que $s$ denote la longitud de arco exacta y $s_n$ denote la aproximación por n segmentos de recta:
Si asumimos que $x(t)$ e $y(t)$ son funciones diferenciables de $t$, entonces se aplica el teorema del valor medio, por lo que en cada subintervalo $[t_{k - 1}, t_k]$ existen $\widehat{t}_k$ y $\bar{t}_k$ tal que
$$x(t_k) - x(t_{k - 1}) = x'(\widehat{t}_k)(t_k - t_{k - 1}) = x'(\widehat{t}_k)Δt\\ y(t_k) - y(t_{k - 1}) = y'(\bar{t}_k)(t_k - t_{k - 1}) = y'(\bar{t}_k)Δt$$Por lo tanto, la ecuación se convierte en
$$\begin{aligned} s &\approx \sum_{k=1}^N s_k\\ &= \sum_{k=1}^n \sqrt{(x'(\widehat{t}_k)Δt)^2 + (y'(\bar{t}_k)Δt)^2}\\ &= \sum_{k=1}^n \sqrt{(x'(\widehat{t}_k)^2(Δt)^2 + (y'(\bar{t}_k)^2(Δt)^2}\\ &= \left(\sum_{k=1}^n \sqrt{(x'(\widehat{t}_k))^2 + (y'(\bar{t}_k))^2}\right)Δt \end{aligned}$$Esta es una suma de Riemann que se aproxima a la longitud del arco sobre una partición del intervalo $[a, b]$. Si asumimos además que las derivadas son continuas y permitimos que el número de puntos en la partición aumente sin límite, la aproximación se aproxima a la longitud exacta del arco. Esto da
Al tomar el límite, los valores de $\widehat{t}_k$ y $\bar{t}_k$ están contenidos dentro del mismo intervalo cada vez menor de ancho $Δt$, por lo que deben converger al mismo valor. Podemos resumir este método en el siguiente teorema.
Longitud de arco de una curva paramétrica
Considera la curva plana definida por las ecuaciones paramétricas.
$$x = x(t),\; y = y(t),\; t_1 ≤ t ≤ t_2$$y supongamos que $x(t)$ e $y(t)$ son funciones diferenciables de $t$. Entonces la longitud del arco de esta curva está dada por
$$s = \int_{t_1}^{t_2}\sqrt{\left(\frac{dx}{dt}\right)^2 + \left(\frac{dy}{dt}\right)^2}dt \tag{$1.5$}$$En este punto, una derivación lateral conduce a una fórmula anterior para la longitud del arco. En particular, supón que el parámetro se puede eliminar, lo que lleva a una función $y = F(x)$. Luego $y(t) = F(x(t))$ y por Regla de la cadena $y'(t) = F'(x(t))x'(t)$. Sustituyendo esto en la ecuación $(1.5)$, obtenemos:
$$\begin{aligned} s &= \int_{t_1}^{t_2}\sqrt{\left(\frac{dx}{dt}\right)^2 + \left(\frac{dy}{dt}\right)^2}dt\\ &= \int_{t_1}^{t_2}\sqrt{\left(\frac{dx}{dt}\right)^2 + \left(F'(x)\frac{dx}{dt}\right)^2}dt\\ &= \int_{t_1}^{t_2}\sqrt{\left(\frac{dx}{dt}\right)^2 \left(1+(F'(x)\right)^2}dt\\ &= \int_{t_1}^{t_2} x'(t)\sqrt{1+\left(\frac{dy}{dx}\right)^2}dt \end{aligned}$$Aquí hemos asumido que $x'(t)> 0$, que es una suposición razonable. La regla de la cadena nos dice que $dx = x'(t)dt$, y dejando $a = x(t_1)$ y $b = x(t_2)$, obtenemos la fórmula
$$s=\int_{a}^{b} \sqrt{1+\left(\frac{dy}{dx}\right)^2}dx,$$la cuál es la fórmula para la longitud del arco obtenida en la Introducción en los libros de integración.
Encontrar la longitud del arco de una curva paramétrica
Encuentra la longitud del arco del semicírculo definido por las ecuaciones
$$x(t) = 3cost,\; y(t) = 3sent,\; 0≤t≤π$$
Ahora volvemos al problema planteado al comienzo de la sección sobre una pelota de béisbol que deja la mano de un lanzador. Ignorando el efecto de la resistencia del aire (¡a menos que sea una bola curva!), La bola recorre un camino parabólico. Suponiendo que la mano del lanzador está en el origen y la bola viaja de izquierda a derecha en la dirección del eje $x$ positivo, las ecuaciones paramétricas para esta curva se pueden escribir como:
$$x(t)=140t,\;y(t)=-16t^2+2t$$donde $t$ representa el tiempo. Primero calculamos la distancia que recorre la pelota en función del tiempo. Esta distancia está representada por la longitud del arco. Podemos modificar la fórmula de la longitud del arco ligeramente. Primero reescribe las funciones $x(t)$ e $y(t)$ usando $v$ como variable independiente, para eliminar cualquier confusión con el parámetro $t$:
$$x(v) = 140v,\; y(v) = - 16v^2 + 2v$$Luego escribimos la fórmula de la longitud del arco de la siguiente manera:
$$\begin{aligned} s(t) &= \int_{0}^{t}\sqrt{\left(\frac{dx}{dv}\right)^2+\left(\frac{dy}{dv}\right)^2}dv\\ &= \int_{0}^{t}\sqrt{140^2+(-32v+2)^2}dv \end{aligned}$$La variable $v$ actúa como una variable ficticia que desaparece después de la integración, dejando la longitud del arco en función del tiempo $t$. Para integrar esta expresión podemos usar una tabla de integrales, en la cual encontrarás esta expresión:
$$\int \sqrt{a^2+u^2}du = \frac{u}{2}\sqrt{a^2+u^2}+\frac{a^2}{2}ln|u+\sqrt{a^2+u^2}|+C$$Establecemos $a = 140$ y $u = -32v + 2$. Esto da $du = -32dv$, entonces $dv = -\frac{1}{32}du$. Por lo tanto
$\int\sqrt{140^2+(-32v+2)^2}dv = -\frac{1}{32}\int\sqrt{a^2+u^2}du$$=-\frac{1}{32}\left(\frac{(-32v+2)}{2}\sqrt{140^2 +(-32v+2)^2}+\frac{140^2}{2}ln|(-32v+2)+\sqrt{140^2+(-32v+2)^2}|\right)+C$
y
$s(t)= -\frac{1}{32}\left(\frac{(-32v+2)}{2}\sqrt{140^2 +(-32v+2)^2}+\frac{140^2}{2}ln|(-32v+2)+\sqrt{140^2+(-32v+2)^2}|\right)\\ +\frac{1}{32}\left(\sqrt{140^2+2^2}+\frac{140^2}{2}ln|2+\sqrt{140^2+2^2}\right)$
$s(t)=\left(\frac{t}{2}-\frac{1}{32}\right) \sqrt{1024t^2-128t+19604} -\frac{1225}{4}ln|(-32t+2)+\\ \sqrt{1024t^2-128t+19604}|+\frac{\sqrt{19604}}{32}+\frac{1225}{4}ln(2+\sqrt{19604}).$
Esta función representa la distancia recorrida por la pelota en función del tiempo. Para calcular la velocidad, toma la derivada de esta función con respecto a $t$. Si bien esto puede parecer una tarea desalentadora, es posible obtener la respuesta directamente del Teorema fundamental del cálculo:
$$\frac{d}{dx}\int_{0}^{x}f(u)du = f(x).$$Por lo tanto
$$\begin{aligned} s'(t) &= \frac{d}{dt}s(t)\\ &= \frac{d}{dt}\int_{0}^{t}\sqrt{140^2+(-32v+2)^2}dv\\ &= \sqrt{140^2+(-32v+2)^2}\\ &= \sqrt{1024t^2-128t+19604}\\ &= 2\sqrt{256t^2-32t+4901} \end{aligned}$$Un tercio de segundo después de que la pelota deja la mano del lanzador, la distancia que recorre es igual a
$s(\frac13) = (\frac{1/3}{2}-\frac{1}{32})\sqrt{1024(1/3)^2-128(1/3)+19604}\\ -\sqrt{125}{4}|(-32(1/3)+2)+\sqrt{1024(1/3)^2-128(1/3)+19604}|\\ +\frac{\sqrt{19604}}{32}+\frac{1225}{4}ln(2+\sqrt{19604})\\ \approx 46.69 pies.$Este valor es un poco más de tres cuartos del camino al plato de home. La velocidad de la pelota es
$$s'(\frac13) = 2\sqrt{256(\frac13)^2 - 16(\frac13) + 4901} \approx 140.34\; pies/s$$Esta velocidad se traduce en aproximadamente 95 mph, una bola rápida de grandes ligas.
Recordemos el problema de encontrar el área de la superficie de un volumen de revolución. Una fórmula para encontrar el área de la superficie de un volumen generado por una función $y = f(x)$ desde $x = a$ a $x = b$, girada alrededor del eje $x$ es:
$$ S = 2π\int_{a}^{b} f(x)\sqrt{1+(f'x))^2}dx\tag{$1.6$}$$Ahora consideramos un volumen de revolución generado al girar una curva definida paramétricamente como $x = x(t), \;y = y(t),\; a \le t \le b$ alrededor del eje $x$ como se muestra en la siguiente figura.
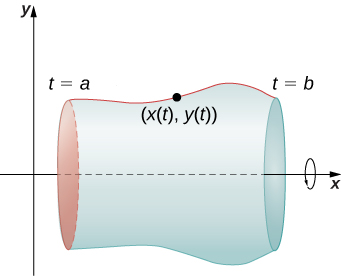
La fórmula análoga para una curva definida paramétricamente es
$$ S = 2π\int_{a}^{b} y(t)\sqrt{(x'(t))^2+(y'(t))^2}dt$$siempre que $y(t)$ no sea negativo en $[a, b]$.
Encontrar la superficie de área
Encuentra el área de la superficie de una esfera de radio $r$ centrada en el origen.
Una demostración interesante, nos la presenta Anthony OR 柯志明 en la siguiente escena de GeoGebra.
Arrastra el punto rojo para ver cómo se puede diseccionar una esfera en $n$ pirámides (aproximadas) de alturas iguales al radio $r$. Deja que $A_1$, $A_2$, ..., $A_n$ sean las áreas de las bases de las pirámides.
Por lo tanto, demuestra que $S = 4πr^2$.
¡Haz clic en la esquina superior derecha de la escena, para verla en un tamaño mayor!
A continuación, encontrarás varios ejercicios para que confrontes lo aprendido. Lo ejercicios correspondientes a numerales impares, presentan la solución.
Para los siguientes ejercicios, cada conjunto de ecuaciones paramétricas representa una recta. Sin eliminar el parámetro, encuentre la pendiente de cada recta.
Para los siguientes ejercicios, determina la pendiente de la recta tangente, luego encuentra la ecuación de la recta tangente en el valor dado del parámetro.
Para los siguientes ejercicios, encuentra todos los puntos en la curva que tengan la pendiente dada.
Para los siguientes ejercicios, escribe la ecuación de la recta tangente en coordenadas cartesianas para el parámetro dado $t$.
Para los siguientes ejercicios, encuentra $\dfrac{d^2y}{dx^2}$.
Para los siguientes ejercicios, encuentra puntos en la curva en los que la recta tangente sea horizontal o vertical.
Para los siguientes ejercicios, encuentra $\frac{dy}{dx}$ en el valor del parámetro.
Para los siguientes ejercicios, encuentra $\dfrac{d^2y}{dx^2}$ en el punto dado sin eliminar el parámetro.
Para los siguientes ejercicios, encuentra el área de las regiones delimitadas por las curvas paramétricas y los valores indicados del parámetro.
Para los siguientes ejercicios, encuentra la longitud del arco de la curva en el intervalo indicado del parámetro.
Para los siguientes ejercicios, encuentra el área de la superficie obtenida girando la curva dada sobre el eje $x$.
El sistema de coordenadas rectangulares (o plano cartesiano) proporciona un medio de mapear puntos a pares ordenados y pares ordenados a puntos. Esto se denomina mapeo uno a uno desde puntos en el plano hasta pares ordenados. El sistema de coordenadas polares proporciona un método alternativo de mapeo de puntos a pares ordenados. En esta sección veremos que, en algunas circunstancias, las coordenadas polares pueden ser más útiles que las coordenadas rectangulares.
Para encontrar las coordenadas de un punto en el sistema de coordenadas polares, considera la . El punto $P$ tiene coordenadas cartesianas $(x,y)$. El segmento de recta que conecta el origen al punto $P$ mide la distancia desde el origen a $P$ y tiene una longitud $r$. El ángulo entre el eje $x$ positivo y el segmento de recta tiene la medida $θ$. Esta observación sugiere una correspondencia natural entre el par de coordenadas $(x,y)$ y los valores $r$ y $θ$. Esta correspondencia es la base del sistema de coordenadas polares. Ten en cuenta que cada punto en el plano cartesiano tiene dos valores (de ahí el término par ordenado) asociado a él. En el sistema de coordenadas polares, cada punto también tiene dos valores asociados: $r$ y $θ$.
Usando la trigonometría del triángulo rectángulo, las siguientes ecuaciones son verdaderas para el punto $P$:
$$cosθ = \frac{x}{r}\;\text{entonces}\;\;x=rcosθ$$ $$senθ=\frac{y}{r}\;\text{entonces }\;\;y=rsenθ$$Por lo tanto
$$r^2=x^2+y^2\;\;y\;\;tanθ=\frac{y}{x}$$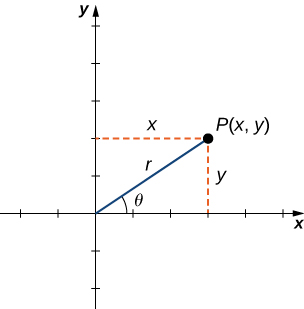
Por lo tanto, cada punto $(x,y)$ en el sistema de coordenadas cartesianas se puede representar como un par ordenado $(r, θ)$ en el sistema de coordenadas polares. La primera coordenada se llama coordenada radial y la segunda coordenada se llama coordenada angular. Cada punto en el plano se puede representar de esta forma.
Observa que la ecuación $tanθ = y/x$ tiene un número infinito de soluciones para cualquier par ordenado $(x,y)$.
Sin embargo, si restringimos las soluciones a valores entre $0$ y $2π$, entonces podemos asignar una solución única al cuadrante en el que se encuentra el punto original $(x,y)$. Entonces el valor correspondiente de $r$ es positivo, entonces $r^2 = x^2 + y^2$.
Convertir puntos entre sistemas de coordenadas
Dado un punto $P$ en el plano con coordenadas cartesianas $(x,y)$ y coordenadas polares $(r, θ)$, las siguientes fórmulas de conversión son verdaderas:
$$x = rcosθ\;\text{y}\;y = rsinθ\tag{$1.7$}$$ $$r^2 = x^2 + y^2\;\text{y}\;tanθ = \frac{y}{x}\tag{$1.8$}.$$Estas fórmulas se pueden utilizar para convertir de coordenadas rectangulares a polares o de coordenadas polares a rectangulares.
Conversión entre coordenadas rectangulares y polares
Convierte cada uno de los siguientes puntos en coordenadas polares.
Convierte cada uno de los siguientes puntos en coordenadas rectangulares.
La representación polar de un punto no es única. Por ejemplo, las coordenadas polares $(2, \fracπ3)$ y $(2,\frac{7π}{3})$ representan el punto $(1,\sqrt{3})$ en el sistema rectangular. Además, el valor de $r$ puede ser negativo. Por lo tanto, el punto con coordenadas polares $(-2,\frac{4π}{3})$ también representa el punto $(1,\sqrt{3})$ en el sistema rectangular, como podemos ver usando la Ecuación $1.8$:
| $$\begin{aligned} x &= rcosθ\\ &=-2cos(\frac{π}{3})\\ &=-2(-\frac12)=1 \end{aligned}$$ | y | $$\begin{aligned} y &= rsenθ\\ &= -2sen(\frac{4π}{3})\\ &= -2(-\frac{\sqrt{3}}{2})=\sqrt{3} \end{aligned}$$ |
Cada punto en el plano tiene un número infinito de representaciones en coordenadas polares. Sin embargo, cada punto en el plano tiene solo una representación en el sistema de coordenadas rectangular.
Ten en cuenta que la representación polar de un punto en el plano también tiene una interpretación visual.
En particular, $r$ es la distancia dirigida que el punto se encuentra desde el origen, y $θ$ mide el ángulo que el segmento de recta desde el origen hasta el punto forma con el eje $x$ positivo. Los ángulos positivos se miden en sentido antihorario y los ángulos negativos se miden en sentido horario. El sistema de coordenadas polares aparece en la siguiente figura.
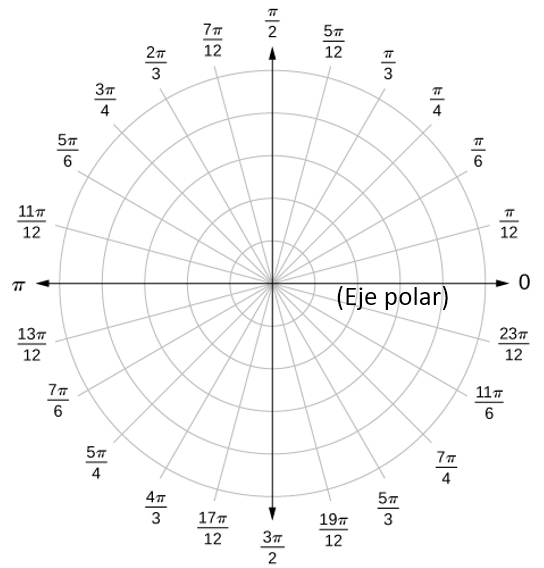
El segmento de recta que comienza desde el centro del gráfico hacia la derecha (llamado eje $x$ positivo en el sistema cartesiano) es el eje polar.
El punto central es el polo, u origen, del sistema de coordenadas, y corresponde a $r = 0$. El círculo más interno que se muestra en la contiene todos los puntos a una distancia de una unidad del polo, y está representado por la ecuación $r = 1$. Entonces $r = 2$ es el conjunto de puntos a 2 unidades del polo, y así sucesivamente. Los segmentos de recta que emanan del polo corresponden a ángulos fijos. Para trazar un punto en el sistema de coordenadas polares, comienza con el ángulo. Si el ángulo es positivo, mida el ángulo desde el eje polar en sentido antihorario. Si es negativo, mídelo en sentido horario. Si el valor de $r$ es positivo, mueva esa distancia a lo largo del rayo terminal del ángulo. Si es negativo, muévase a lo largo del rayo opuesto al rayo terminal del ángulo dado.
En la siguiente escena, diseñada por Elena E. Álvarez SaizElena usa la notación $φ$ para el ángulo, en lugar de $θ$., haz clic en el botón "ver ejemplos", para diferentes posiciones del punto $P$.
En esta otra escena interactiva de Elena E. Álvarez Saiz, puedes observar la conversión de un sistema a otro, haciendo clic en los botones "ver ejemplos". Recuerda que haciendo clic en la esquina superior derecha, puedes ver la escena en una ventana ampliada.
Trazar puntos en el plano polar
Traza cada uno de los siguientes puntos en el plano polar.
Ahora que sabemos cómo trazar puntos en el sistema de coordenadas polares, podemos discutir cómo trazar curvas. En el sistema de coordenadas rectangulares, podemos graficar una función $y = f(x)$ y crear una curva en el plano cartesiano. De manera similar, podemos graficar una curva generada por una función $r = f(θ)$.
La idea general detrás de graficar una función en coordenadas polares es la misma que graficar una función en coordenadas rectangulares. Comienza con una lista de valores para la variable independiente ($θ$ en este caso) y calcula los valores correspondientes de la variable dependiente $r$. Este proceso genera una lista de pares ordenados, que se pueden trazar en el sistema de coordenadas polares. Finalmente, conecta los puntos y aprovecha cualquier patrón que pueda aparecer. La función puede ser periódica, por ejemplo, lo que indica que solo se necesita un número limitado de valores para la variable independiente.
Graficar una función en coordenadas polares
Grafica la curva definida por la función $r = 4senθ$. Identifica la curva y reescribe la ecuación en coordenadas rectangulares.
En este ejercicio obtendrás una circunferencia que contiene al polo. En la siguiente escena interactiva, también de Elena E. Álvarez Saiz, puedes observar otra ecuación en el sistema de coordenadas polares, que define dos tipos de circunferencia (con centro en el polo o conteniendo el polo). Cambia el valor de $φ_0$ a $pi/2$ y obtendrás la circunferencia del ejercicio anterior.
La gráfica en el ejercicio anterior era la de una circunferencia. La ecuación de la circunferencia se puede transformar en coordenadas rectangulares utilizando las fórmulas de transformación de la Ecuación 1.8, tal como lo puedes observar en el siguiente ejercicio.
Transformación de ecuaciones polares en coordenadas rectangulares
Reescribe cada una de las siguientes ecuaciones en coordenadas rectangulares e identifica el gráfico.
Hemos visto varios ejemplos de dibujar gráficos de curvas definidas por ecuaciones polares. Un resumen de algunas curvas comunes se da en las siguientes tablas ( y ). En cada ecuación, $a$ y $b$ son constantes arbitrarias.
Haz clic sobre las imágenes para interactuar con las curvas. Las cuatro primeras fueron diseñadas por Elena E. Álvarez Saiz con DescartesJS, las dos últimas las diseñamos con GeoGebra.
| Nombre | Ecuación | Ejemplo |
| Recta pasando por el origen | $θ = k$ | 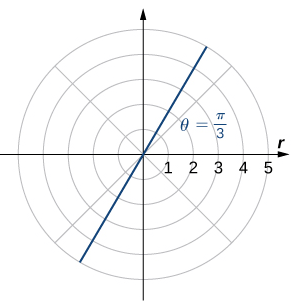 |
| Circunferencia | $r = acos(θ)+bsen(θ)$ | 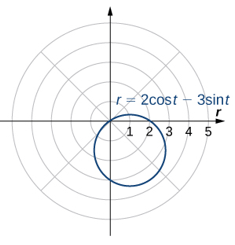 |
| Espiral | $r = a+b(θ)$ |  |
| Nombre | Ecuación | Ejemplo |
| Cardioide | $r=a(1+cosθ)\\r=a(1-cosθ)\\r=a(1+senθ)\\r=a(1-senθ)$ | 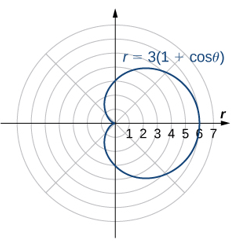 |
| Limaçon | $r = acosθ+b\\asenθ+b$ |  |
| Rosa | $r = acos(bθ)\\r = asen(bθ)$ | 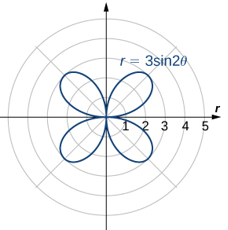 |
Si interactuaste con las curvas, habrás observado que un cardioide es un caso especial de un Limaçon (pronunciado "lee-mah-son"). La rosa es una curva muy interesante. Observa que la gráfica de $r = 3sen2θ$ tiene cuatro pétalos. Sin embargo, la gráfica de $r = 3sen3θ$ tiene tres pétalos como se muestra en la siguiente figura.

Si el coeficiente de $θ$ es par, la gráfica tiene el doble de pétalos que el coeficiente. Si el coeficiente de $θ$ es impar, entonces el número de pétalos es igual al coeficiente. Te recomendamos explorar por qué sucede esto. Incluso surgen gráficos más interesantes cuando el coeficiente de $θ$ no es un número entero. Por ejemplo, si es racional, entonces la curva está cerrada; es decir, finalmente termina donde comenzó (ver escena interactiva a continuación). Sin embargo, si el coeficiente es irracional, entonces la curva nunca se cierra.
Aunque puede parecer que la curva está cerrada, un examen más detallado revela que los pétalos justo por encima del eje $x$ positivo son ligeramente más gruesos. Esto se debe a que el pétalo no coincide con el punto de partida.
En la escena, cambia el valor de $a$ por números pares, impares o racionales.
Como la curva definida por la gráfica de $r = 3sen(πθ)$ nunca se cierra, la curva representada es solo una representación parcial. De hecho, este es un ejemplo de una curva que llena espacios. Una curva de relleno de espacio es aquella que, de hecho, ocupa un subconjunto bidimensional del plano real. En este caso, la curva ocupa el círculo de radio 3 centrado en el origen.
Apertura del capítulo: Describiendo una espiral
Recordemos el nautilo de cámara introducido en el primer apartado. Esta criatura muestra una espiral cuando se corta la mitad de la capa exterior. Es posible describir una espiral usando coordenadas rectangulares. La muestra una espiral en coordenadas rectangulares. ¿Cómo podemos describir esta curva matemáticamente?

Supón que se describe una curva en el sistema de coordenadas polares a través de la función $r = f(θ)$. Dado que tenemos fórmulas de conversión de coordenadas polares a rectangulares dadas por
$$x = rcosθ$$ $$y = rsenθ$$es posible reescribir estas fórmulas usando la función
$$x = f(θ)cosθ$$ $$y = f(θ)senθ$$Este paso proporciona una parametrización de la curva en coordenadas rectangulares utilizando θ como parámetro. Por ejemplo, la fórmula espiral $r = a + bθ$ de la se convierte en
$$x = (a+bθ)cosθ$$ $$y = (a+bθ)senθ$$Dejando que θ varíe de $-\infty$ a $\infty$ genera toda la espiral.
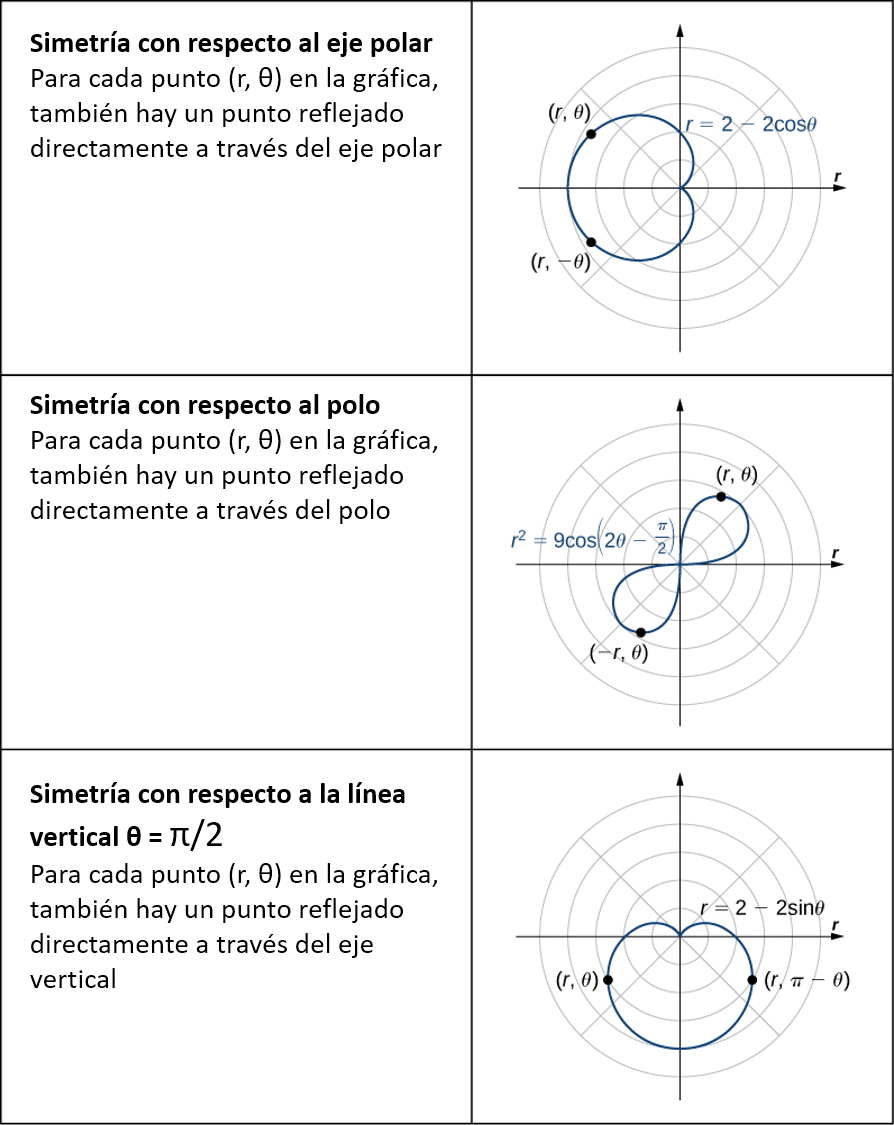
Al estudiar la simetría de funciones en coordenadas rectangulares (es decir, en la forma $y = f(x)$), hablamos de simetría con respecto al eje $y$ y simetría con respecto al origen.
En particular, si $f(-x) = f(x)$ para todas las $x$ en el dominio de $f$, entonces $f$ es una función par y su gráfica es simétrica con respecto al eje $y$. Si $f(-x) = -f (x)$ para todas las $x$ en el dominio de $f$, entonces $f$ es una función impar y su gráfica es simétrica con respecto al origen. Al determinar qué tipos de simetría exhibe un gráfico, podemos aprender más sobre la forma y el aspecto del gráfico. La simetría también puede revelar otras propiedades de la función que genera el gráfico. La simetría en las curvas polares funciona de manera similar.
Considera una curva generada por la función $r = f(θ)$ en coordenadas polares.
La siguiente tabla muestra ejemplos de cada tipo de simetría.
Usando la simetría para graficar una ecuación polar
Encuentra la simetría de la rosa definida por la ecuación $r = 3sen(2θ)$ y crea una gráfica.
A continuación, encontrarás varios ejercicios para que confrontes lo aprendido. Lo ejercicios correspondientes a numerales impares, presentan la solución.
En los siguientes ejercicios, traza el punto cuyas coordenadas polares se dan construyendo primero el ángulo $θ$ y luego marcando la distancia $r$ a lo largo del rayo.
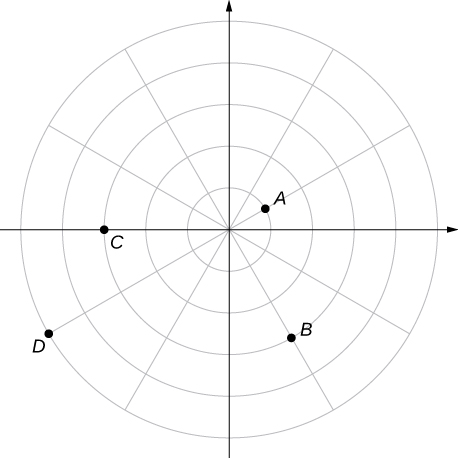
Para los siguientes ejercicios, considera el gráfico polar a continuación. Da dos conjuntos de coordenadas polares para cada punto.
Para los siguientes ejercicios, se dan las coordenadas rectangulares de un punto. Encuentra dos conjuntos de coordenadas polares para el punto en $(0,2π)$. Redondea a tres decimales.
Para los siguientes ejercicios, encuentra coordenadas rectangulares para el punto dado en coordenadas polares.
Para los siguientes ejercicios, determina si las gráficas de la ecuación polar son simétricas con respecto al eje $x$, el eje $y$ o el origen.
Para los siguientes ejercicios, describe la gráfica de cada ecuación polar. Confirma cada descripción convirtiéndola en una ecuación rectangular.
Para los siguientes ejercicios, convierte la ecuación rectangular a forma polar y dibuja su gráfica.
Para los siguientes ejercicios, convierte la ecuación rectangular a forma polar y dibuja su gráfica.
Para los siguientes ejercicios, convierte la ecuación polar a forma rectangular y dibuja su gráfica.
Para los siguientes ejercicios, dibuja un gráfico de la ecuación polar e identifica cualquier simetría.
En el sistema de coordenadas rectangulares, la integral definida proporciona una forma de calcular el área bajo una curva. En particular, si tenemos una función $y = f(x)$ definida de $x = a$ a $x = b$ donde $f(x) \gt 0$ en este intervalo, el área entre la curva y el eje $x$ viene dada por $A = \int_{a}^{b} f(x)dx$. Este hecho, junto con la fórmula para evaluar esta integral, se resume en el Teorema fundamental del cálculo. Del mismo modo, la longitud del arco de esta curva viene dada por $L = \int_{a}^{b} \sqrt{1+(f'(x))^2}dx$. En esta sección, estudiamos fórmulas análogas para el área y la longitud del arco en el sistema de coordenadas polares.
Hemos estudiado las fórmulas para el área bajo una curva definida en coordenadas rectangulares y curvas definidas paramétricamente. Ahora dirigimos nuestra atención a derivar una fórmula para el área de una región limitada por una curva polar.
Recuerda que la prueba del Teorema fundamental del cálculo utilizó el concepto de una suma de Riemann para aproximar el área bajo una curva mediante el uso de rectángulos. Para las curvas polares usamos nuevamente la suma de Riemann, pero los rectángulos se reemplazan por sectores de un círculo.
Considera una curva definida por la función $r = f(θ)$, donde $α \le θ \le β$. Nuestro primer paso es dividir el intervalo $[α, β]$ en $n$ subintervalos de igual ancho. El ancho de cada subintervalo viene dado por la fórmula $Δθ = (β - α)/n$, y el i-ésimo punto de partición $θ_i$ viene dado por la fórmula $θ_i = α + iΔθ$.
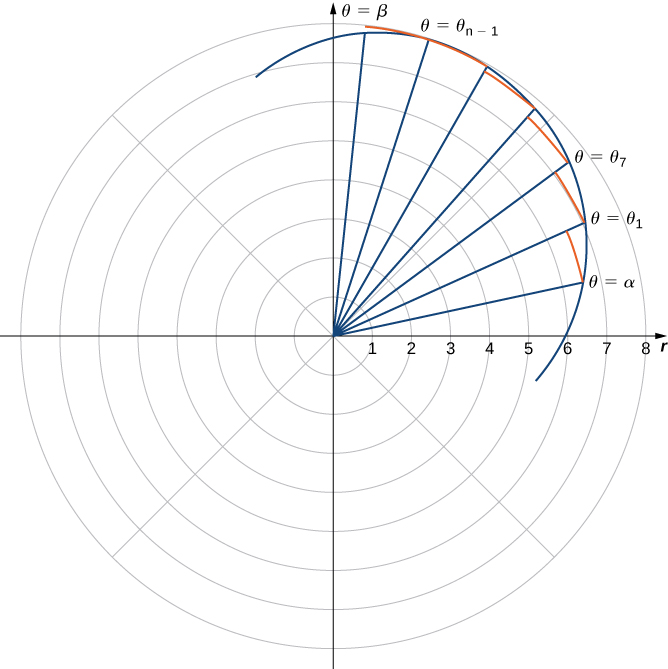
Cada punto de partición $θ = θ_i$ define una recta con pendiente $tanθ_i$ que pasa a través del polo como se muestra en el gráfico anterior. Los segmentos de recta están conectados por arcos de radio constante. Esto define sectores cuyas áreas se pueden calcular utilizando una fórmula geométrica. El área de cada sector se usa para aproximar el área entre segmentos de recta sucesivos. Luego sumamos las áreas de los sectores para aproximar el área total. Este enfoque proporciona una aproximación de suma de Riemann para el área total.
En la siguiente escena interactiva, diseñada por Tom Ahlschwede, puedes visualizar el límite de la suma de las áreas del sector. El límite inferior y el límite superior se pueden cambiar, también cambia la forma de la ecuación polar $r = a_2sen(θ)$
La fórmula para el área de un sector de un círculo se ilustra en la siguiente figura.
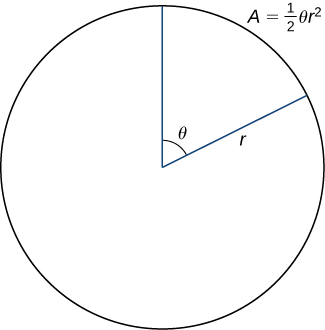
Recuerda que el área de un círculo es $A = π r^2$. Al medir ángulos en radianes, 360 grados es igual a $2π$ radianes. Por lo tanto, una fracción de un círculo se puede medir por el ángulo central $θ$. La fracción del círculo está dada por $\frac{θ}{2π}$, por lo que el área del sector es esta fracción multiplicada por el área total:
$$A=\left(\frac{θ}{2π}\right)π r^2= \frac12θ r^2$$Dado que el radio de un sector típico en la viene dado por $r_i = f(θ_i)$, el área del sector iésimo está dada por
$$A_i = \frac12(Δθ)(f(θ_i))^2$$Por lo tanto, una suma de Riemann que se aproxima al área viene dada por
Tomamos el límite como $n \to\infty$ para obtener el área exacta:
$$\lim_{n \to\infty} \sum_{i=1}^n A_i = \frac12\int_{α}^{β}(f(θ))^2dθ$$Esto nos da el siguiente teorema.
Supón que $f$ es continua y no negativa en el intervalo $α \le θ \le β$ con $0 \le β - α \le 2π$. El área de la región delimitada por la gráfica de $r = f(θ)$ entre las rectas radiales $θ = α$ y $θ = β$ es
$$A=\frac12\int_{α}^{β}(f(θ))^2dθ = \frac12\int_{α}^{β}r^2dθ \tag{$1.9$}$$
Encontrar el área de una región polar
Encuentra el área de un pétalo de la rosa definida por la ecuación $r = 3sen (2θ)$.
En la siguiente escena interactiva, diseñada por Tom Ahlschwede, puedes interactuar con la rosa y los segmentos usados para hallar el área. El límite inferior y el límite superior se pueden cambiar, también cambia la forma de la ecuación polar.
El ejemplo anterior involucraba encontrar el área dentro de una curva. También podemos usar el área de una región limitada por una curva polar para encontrar el área entre dos curvas polares. Sin embargo, a menudo necesitamos encontrar los puntos de intersección de las curvas y determinar qué función define la curva externa o la curva interna entre estos dos puntos.
Encontrar el área entre dos curvas polares
Encuentra el área fuera del cardioide $r = 2 + 2senθ$ y dentro del círculo $r = 6senθ$.
Una escena interactiva, diseñada por Tim Brzezinski, permite obtener la respuesta al ejercicio anterior. Esta escena permite, además, modificar las funciones polares, el intervalo $[t_{min}, t_{max}]$ y el número de sectores ($n$) en los que deseas dividir el intervalo $[t_{min}, t_{max}]$ (Nota: para ingresar un valor como $2π/3$, simplemente escribes "2pi/3" en el cuadro de entrada).
Interactúa con la escena haciendo clic en la siguiente imagen:
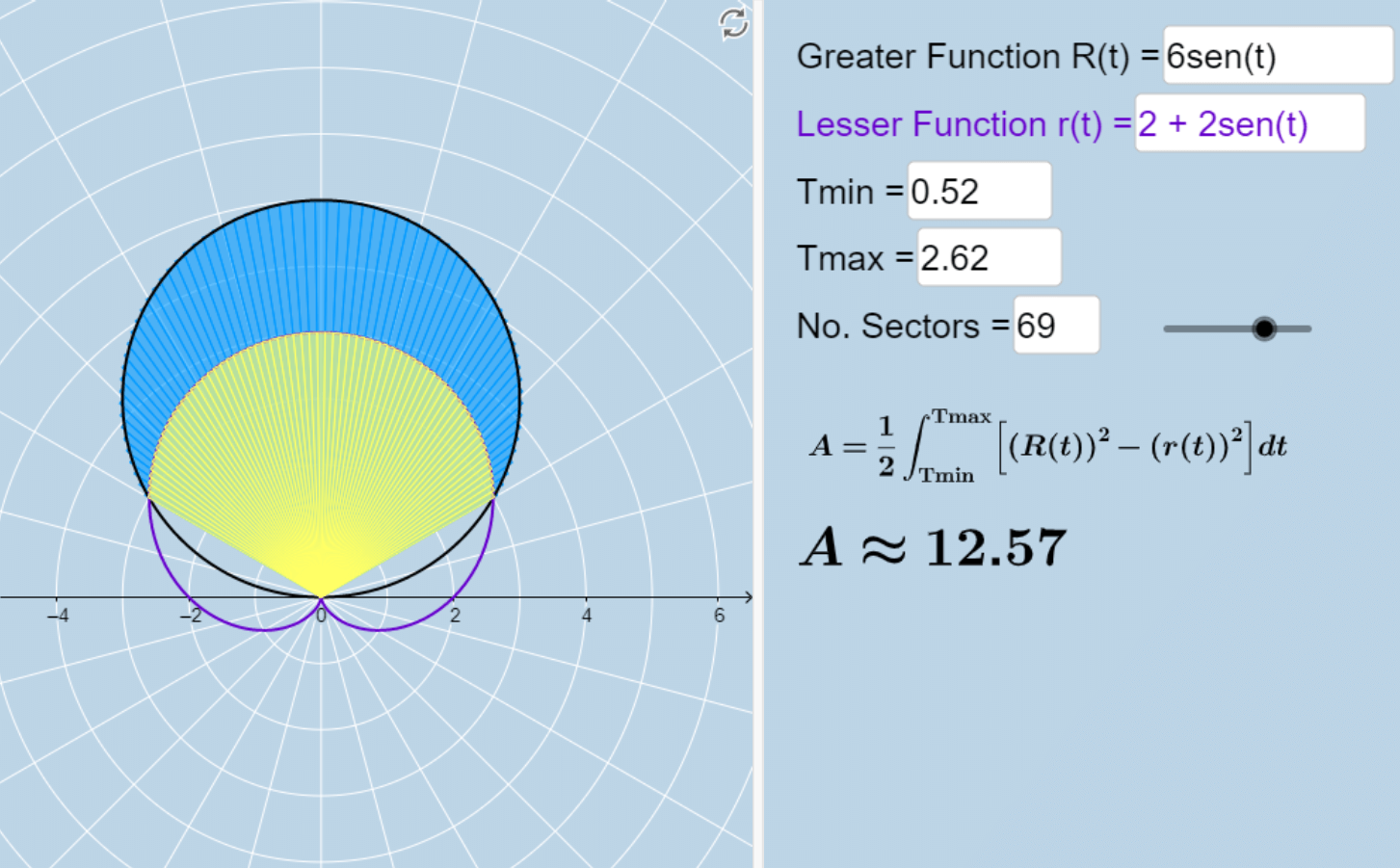
En la solución del ejercicio encontramos el área dentro del círculo y fuera del cardioide al encontrar primero sus puntos de intersección.
Observa que resolver la ecuación directamente para $θ$ produjo dos soluciones: $θ = \frac{π}{6}$ y $θ = \frac{5π}{6}$. Sin embargo, en el gráfico hay tres puntos de intersección. El tercer punto de intersección es el origen. La razón por la cual este punto no apareció como solución es porque el origen está en ambos gráficos, pero para diferentes valores de $θ$. Por ejemplo, para el cardioide obtenemos
$$\begin{aligned} 2+2senθ &= 0\\ senθ &= 1 \end{aligned}$$entonces los valores para $θ$ que resuelven esta ecuación son $θ = \frac{3π}{2} + 2nπ$, donde $n$ es cualquier número entero. Para el círculo obtenemos
$$6senθ = 0$$Las soluciones a esta ecuación son de la forma $θ = nπ$ para cualquier valor entero de $n$. Estos dos conjuntos de soluciones no tienen puntos en común. Independientemente de este hecho, las curvas se intersecan en el origen. Este caso siempre debe tenerse en cuenta.
Aquí deduciremos una fórmula para la longitud del arco de una curva definida en coordenadas polares.
En coordenadas rectangulares, la longitud del arco de una curva parametrizada $(x(t), y(t))$ para $a \le t \le b$ viene dada por
$$L=\int_a^b \sqrt{\left(\frac{dx}{dt}\right)^2+\left(\frac{dy}{dt}\right)^2}dt$$En coordenadas polares definimos la curva mediante la ecuación $r = f(θ)$, donde $α \le θ \le β$. Para adaptar la fórmula de longitud de arco para una curva polar, usamos las ecuaciones
$$x = rcosθ = f(θ)cosθ\;\;,\;\;\;y =rsenθ = f(θ)senθ$$y consideramos el parámetro $θ$ en lugar de $t$. Se cumple
$$\begin{aligned} \frac{dx}{dθ} &= f'(θ)cos(θ)-f(θ)sen(θ)\\ \frac{dy}{dθ} &= f'(θ)sen(θ)-f(θ)cos(θ) \end{aligned}$$Reemplazamos $dt$ por $dθ$, y los límites inferior y superior de integración son $α$ y $β$, respectivamente. Entonces la fórmula de la longitud del arco se convierte en
$$\begin{aligned} L &= \int_a^b \sqrt{\left(\frac{dx}{dt}\right)^2+\left(\frac{dy}{dt}\right)^2}dt\\ &= \int_{α}^{β} \sqrt{\left(\frac{dx}{dθ}\right)^2+\left(\frac{dy}{dθ}\right)^2}dθ\\ &= \int_{α}^{β} \sqrt{(f'(θ)cos(θ)-f(θ)sen(θ))^2 + (f'(θ)sen(θ)-f(θ)cos(θ))^2}dθ\\ &= \int_{α}^{β} \sqrt{(f'(θ))^2(cos^2θ+sen^2θ) + (f(θ))^2(cos^2θ+sen^2θ)}dθ\\ &= \int_{α}^{β} \sqrt{(f'(θ))^2 + (f(θ))^2}dθ\\ &= \int_{α}^{β} \sqrt{r^2 + \left(\frac{dr}{dθ}\right)^2}dθ \end{aligned}$$
Esto conduce al siguiente teorema
Sea $f$ una función cuya derivada es continua en un intervalo $α \le θ \le β$. La longitud de la gráfica de $r = f(θ)\; de\; θ = α \;a\; θ = β$ es
$$L = \int_{α}^{β} \sqrt{|f(θ)|^2 + |f'(θ)|^2}dθ = \int_{α}^{β} \sqrt{r^2 + \left(\frac{dr}{dθ}\right)^2}dθ \tag{$1.10$}$$
Encontrar la longitud del arco de una curva polar
Encuentra la longitud del arco del cardioide $r = 2 + 2cosθ$.
En las siguiente escena interactiva, diseñada por Ron Smith, puedes observar la solución aproximada de la longitud de arco del cardioide. Igualmente, la escena permite hallar el área aproximada de la región interior del cardioide, seleccionando la casilla Sectores.
La escena, además, permite que cambies la curva en la casilla de entrada, lo cual puedes hacerlo tal como lo indica el vídeo que está a continuación de la escena.
A continuación, encontrarás varios ejercicios para que confrontes lo aprendido. Los ejercicios de numerales impares, presentan la solución; sin embargo, puedes recurrir a la escena de Ron Smith para encontrar algunos resultados de los numerales pares (Obviamente, debes tener en cuenta que el intervalo en la escena es $[0, 2π]$; por ejemplo, para la rosa de cuatro pétalos la longitud de arco obtenida es cuatro veces la de un pétalo cuyo intervalo es $[0, π/2]$.
Para los siguientes ejercicios, determina una integral definida que represente el área.
Para los siguientes ejercicios, encuentre el área de la región descrita.
Para los siguientes ejercicios, encuentra una integral definida que represente la longitud del arco.
Para los siguientes ejercicios, encuentre la longitud de la curva en el intervalo dado.
Para los siguientes ejercicios, usa las capacidades de integración de una calculadora para aproximar la longitud de la curva (o, también, la escena interactiva anterior).
Para los siguientes ejercicios, usa la fórmula familiar de la geometría para encontrar el área de la región descrita y luego confirma usando la integral definida.
Para los siguientes ejercicios, usa la fórmula familiar de la geometría para encontrar la longitud de la curva y luego confirme con la integral definida.
Para los siguientes ejercicios, encuentra la pendiente de una recta tangente a una curva polar $r = f(θ)$. Toma $x = rcosθ = f(θ)cosθ$ e $y = rsenθ = f(θ)senθ$, por lo que la ecuación polar $r = f(θ)$ ahora se escribe en forma paramétrica.
Para los siguientes ejercicios, encuentra la pendiente de la recta tangente a la curva polar dada en el punto dado por el valor de $θ$.
Para los siguientes ejercicios, encuentra los puntos en los que las siguientes curvas polares tienen una recta tangente horizontal o vertical.

Los observatorios astronómicos modernos a menudo consisten en una gran cantidad de reflectores parabólicos, conectados por computadoras, utilizados para analizar ondas de radio. Cada plato enfoca los haces paralelos entrantes de ondas de radio en un punto focal preciso, donde pueden sincronizarse por computadora. Si la superficie de uno de los reflectores parabólicos se describe mediante la ecuación $\frac{x^2}{100} + \frac{y^2}{100} = z^4$, ¿dónde está el punto focal del reflector?
Ahora estamos a punto de comenzar una nueva parte del curso de cálculo, cuando estudiamos las funciones de dos o tres variables independientes en el espacio multidimensional.
Muchos de los cálculos son similares a los del estudio de funciones de variable única, pero también hay muchas diferencias. En este capítulo, examinamos los sistemas de coordenadas para trabajar en un espacio tridimensional, junto con los vectores, que son una herramienta matemática clave para tratar cantidades en más de una dimensión. Comencemos aquí con las ideas básicas y avancemos hasta las herramientas más generales y poderosas de las matemáticas en capítulos posteriores.
Cuando se describe el movimiento de un avión en vuelo, es importante comunicar dos datos: la dirección en la que viaja el avión y la velocidad del avión. Al medir una fuerza, como el empuje de los motores del avión, es importante describir no solo la intensidad de esa fuerza, sino también la dirección en la que se aplica. Algunas cantidades se definen en términos del tamaño (también llamado magnitud) y dirección. Una cantidad que tiene magnitud y dirección se llama vector. En este texto, denotamos vectores con letras en negrita, como $\bold{v}$.
Un vector es una cantidad que tiene magnitud y dirección.
Un vector en un plano está representado por un segmento de recta dirigida (una flecha). Los puntos finales del segmento se denominan punto inicial y punto terminal o final del vector. Una flecha desde el punto inicial al punto terminal indica la dirección del vector. La longitud del segmento de recta representa su magnitud.
Usamos la notación $\|\bold{v}\|$ para denotar la magnitud del vector $\bold{v}$. Un vector con un punto inicial y un punto terminal que son iguales se llama vector cero, denotado como $\bold{0}$. El vector cero es el único vector sin dirección, y por convención se puede considerar que tiene cualquier dirección conveniente para el problema en cuestión.
Los vectores con la misma magnitud y dirección se denominan vectores equivalentes. Tratamos los vectores equivalentes como iguales, incluso si tienen puntos iniciales diferentes. Por lo tanto, si $\bold{v}$ y $\bold{w}$ son equivalentes, escribimos
$\bold{v} = \bold{w}$
Se dice que dos vectores son equivalentes si tienen la misma magnitud y dirección.
Las flechas en la ( (b)) son equivalentes. Cada flecha tiene la misma longitud y dirección. Un concepto estrechamente relacionado es la idea de vectores paralelos. Se dice que dos vectores son paralelos si tienen las mismas direcciones o direcciones opuestas. Exploramos esta idea con más detalle más adelante en el capítulo. Un vector se define por su magnitud y dirección, independientemente de dónde se encuentre su punto inicial.
El uso de negrita y letras minúsculas para nombrar vectores es una representación común en la impresión, pero hay anotaciones alternativas. Al escribir el nombre de un vector a mano, por ejemplo, es más fácil dibujar una flecha sobre la variable que simular el tipo de negrita: $\vec{v}$. Cuando un vector tiene un punto inicial $P$ y un punto terminal $Q$, la notación $\vec{PQ}$ es útil porque indica la dirección y ubicación del vector.

Dibujando vectores
Dibuja un vector en el plano desde el punto inicial $P (1,1)$ hasta el punto terminal $Q (8,5)$.
Los vectores tienen muchas aplicaciones en la vida real, incluidas situaciones que implican fuerza o velocidad. Por ejemplo, considera las fuerzas que actúan en un bote que cruza un río. El motor del bote genera una fuerza en una dirección, y la corriente del río genera una fuerza en otra dirección. Ambas fuerzas son vectores.
Debemos tener en cuenta tanto la magnitud como la dirección de cada fuerza si queremos saber a dónde irá el bote.
Un segundo ejemplo que involucra vectores es un mariscal de campo lanzando una pelota de fútbol. El mariscal de campo no lanza la pelota paralela al suelo, sino que apunta hacia el aire. La velocidad de su lanzamiento puede ser representada por un vector. Si sabemos con qué fuerza arroja la pelota (magnitud, en este caso, velocidad) y el ángulo (dirección), podemos decir qué tan lejos viajará la pelota por el campo.
Un número real a menudo se llama escalar en matemáticas y física. A diferencia de los vectores, generalmente se considera que los escalares solo tienen una magnitud, pero no una dirección. Multiplicar un vector por un escalar cambia la magnitud del vector. Esto se llama multiplicación por un escalar. Ten en cuenta que cambiar la magnitud de un vector no indica un cambio en su dirección. Por ejemplo, el viento que sopla de norte a sur puede aumentar o disminuir su velocidad mientras mantiene su dirección de norte a sur.
El producto $k\bold{v}$ de un vector $\bold{v}$ y un escalar $k$ es un vector con una magnitud que es $|k|$ veces la magnitud de $\bold{v}$, y con una dirección que es la misma dirección de $\bold{v}$ si $k > 0$, y opuesta a la dirección de $\bold{v}$ si $k < 0$. Esto se llama multiplicación por un escalar. Si $k = 0$ o $\bold{v} = 0$, entonces $k\bold{v} = 0$.
Como es de esperar, si $k = -1$, denotamos el producto k$\bold{v}$ como
$$k \bold{v} = (-1) \bold{v} = -\bold{v}$$Observa que -$\bold{v}$ tiene la misma magnitud que $\bold{v}$, pero tiene la dirección opuesta ( (d)).

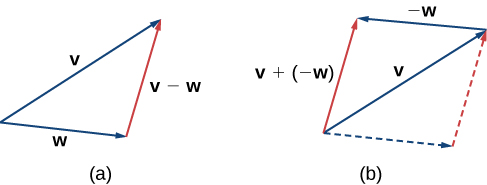
Otra operación que podemos realizar es la suma de vectores, pero como cada vector puede tener su propia dirección, el proceso es diferente de sumar dos números. El método gráfico más común para sumar dos vectores, que consiste en colocar el punto inicial del segundo vector en el punto terminal del primero, como en la (a). Para ver por qué esto tiene sentido, supongamos, por ejemplo, que ambos vectores representan un desplazamiento. Si un objeto se mueve primero desde el punto inicial hasta el punto terminal del vector $\bold{v}$, luego desde el punto inicial hasta el punto terminal del vector $\bold{w}$, el desplazamiento general es el mismo que si el objeto hubiera hecho un solo movimiento desde el punto inicial hasta el punto final del vector $\bold{v} + \bold{w}$. Por razones obvias, este enfoque se llama el método del triángulo. Tenga en cuenta que si hubiéramos cambiado el orden, de modo que $\bold{w}$ fuera nuestro primer vector y $\bold{v}$ fuera nuestro segundo vector, habríamos terminado en el mismo lugar (nuevamente, observa la (a)). Por lo tanto, $\bold{v} + \bold{w} = \bold{w} + \bold{v}$.
Un segundo método para agregar vectores se llama método o regla del paralelogramo. Con este método, colocamos los dos vectores para que tengan el mismo punto inicial, y luego dibujamos un paralelogramo con los vectores como dos lados adyacentes, como en la (b). La longitud de la diagonal del paralelogramo es la suma. Comparando la (a) y la (b), podemos ver que obtenemos la misma respuesta usando cualquiera de los métodos. El vector $\bold{v} + \bold{w}$ se llama suma vectorial.

También es apropiado aquí discutir la sustracción de vectores. Definimos $\bold{v} - \bold{w}$ como $\bold{v} + (- \bold{w}) = \bold{v} + (-1)\bold{w}$. El vector $\bold{v} - \bold{w}$ se llama la diferencia vectorial. Gráficamente, el vector $\bold{v} - \bold{w}$ se representa dibujando un vector desde el punto final de $\bold{w}$ hasta el punto final de $\bold{v}$ ().
En la (a), el punto inicial de $\bold{v} + \bold{w}$ es el punto inicial de $\bold{v}$. El punto final de $\bold{v} + \bold{w}$ es el punto final de $\bold{w}$. Estos tres vectores forman los lados de un triángulo. Se deduce que la longitud de cualquier lado es menor que la suma de las longitudes de los lados restantes.
Entonces tenemos
$$\|v + w\| \le \|v\| + \|w\|$$Esto se conoce más generalmente como la desigualdad del triángulo o desigualdad triangular. Sin embargo, hay un caso en el que el vector resultante $\bold{v} + \bold{w}$ tiene la misma magnitud que la suma de las magnitudes de $\bold{v}$ y $\bold{w}$. Esto sucede solo cuando $\bold{v}$ y $\bold{w}$ tienen la misma dirección.
Si necesitamos sumar tres o más vectores, repetimos la regla del paralelogramo para los pares de vectores hasta que encontremos la resultante de todos los resultados. Para tres vectores, por ejemplo, primero encontramos la resultante del vector 1 y el vector 2, y luego encontramos la resultante de este vector con el vector 3.
En la siguiente escena interactiva, podrás observar tres vídeos que muestran los métodos para la suma vectorial (en lo vídeos se usan las expresiones "cabeza" y "cola", en lugar de "inicio" y "final".
En la siguiente escena interactiva se explica, paso a paso, el método del paralelogramo. Puedes cambiar la dirección de los vectores, usando el botón pulsador.
Combinando vectores
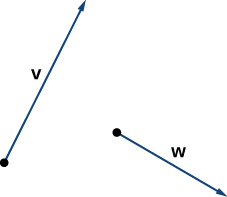
Dados los vectores $\bold{v}$ y $\bold{w}$ que se muestran en la , dibuja los vectores
Trabajar con vectores en un plano es más fácil cuando estamos trabajando en un sistema de coordenadas. Cuando los puntos iniciales y los puntos terminales de los vectores se dan en coordenadas cartesianas, los cálculos se vuelven sencillos.
Comparación de vectores
¿Son $\bold{v}$ y $\bold{w}$ vectores equivalentes?
Hemos visto cómo trazar un vector cuando se nos da un punto inicial y un punto final. Sin embargo, debido a que un vector se puede colocar en cualquier lugar de un plano, puede ser más fácil realizar cálculos con un vector cuando su punto inicial coincide con el origen. Llamamos a un vector con su punto inicial en el origen un vector de posición estándar. Dado que se sabe que el punto inicial de cualquier vector en posición estándar es $(0,0)$, podemos describir el vector mirando las coordenadas de su punto final. Por lo tanto, si el vector $\bold{v}$ tiene su punto inicial en el origen y su punto final en $(x,y)$, escribimos el vector en sus componentes como
$$\bold{v} = ⟨x,y ⟩$$Cuando un vector se escribe en forma de componentes como este, los escalares $x$ e $y$ se denominan componentes de $\bold{v}$.
El vector con el punto inicial $(0,0)$ y el punto final $(x,y)$ se puede escribir en forma de componente como
$$\bold{v} = ⟨x,y ⟩$$Los escalares $x$ e $y$ se llaman los componentes de $\bold{v}$.
Recuerda que los vectores se nombran con letras minúsculas en negrita o dibujando una flecha sobre su nombre. También hemos aprendido que podemos nombrar un vector por su forma componente, con las coordenadas de su punto final entre paréntesis angulares. Sin embargo, al escribir la forma componente de un vector, es importante distinguir entre $⟨x,y ⟩$ y $(x,y)$. El primer par ordenado usa corchetes angulares para describir un vector, mientras que el segundo usa paréntesis para describir un punto en un plano. El punto inicial de $⟨x,y ⟩$ es $(0,0)$; El punto final de $⟨x,y ⟩$ es $(x,y)$.
Cuando tenemos un vector que aún no está en posición estándar, podemos determinar su forma componente de una de dos maneras. Podemos usar un enfoque geométrico, en el que dibujamos el vector en el plano de coordenadas, y luego dibujamos un vector de posición estándar equivalente. Alternativamente, podemos encontrarlo algebraicamente, usando las coordenadas del punto inicial y el punto terminal. Para encontrarlo algebraicamente, restamos la coordenada $x$ del punto inicial de la coordenada $x$ del punto final para obtener el componente $x$, y restamos la coordenada $y$ del punto inicial de la coordenada $y$ del punto final para obtener el componente $y$.
Sea $\bold{v}$ un vector con un punto inicial $(x_i, y_i)$ y un punto final $(x_t, y_t)$. Entonces podemos expresar $\bold{v}$ en forma de componente como $\bold{v} = ⟨x_t - x_i, y_t - y_i ⟩$.
Expresando vectores en forma de componente
Expresa el vector $\bold{v}$ con el punto inicial $(-3,4)$ y el punto final $(1,2)$ en forma de componente.
Para encontrar la magnitud de un vector, calculamos la distancia entre su punto inicial y su punto final. La magnitud del vector $\bold{v} = ⟨x, y⟩$ se denota $\|v\|$, o $|\bold{v}|$, y se puede calcular utilizando la fórmula
$$\|v\| = \sqrt{x^2 + y^2}$$Observa que debido a que este vector está escrito en forma de componente, es equivalente a un vector en posición estándar, con su punto inicial en el punto de origen y final $(x,y)$. Por lo tanto, es suficiente calcular la magnitud del vector en posición estándar. Usando la fórmula de la distancia para calcular la distancia entre el punto inicial $(0,0)$ y el punto final $(x,y)$, tenemos
Con base en esta fórmula, está claro que para cualquier vector $\bold{v}$, $\|v\| \ge 0$ y $\|v\| = 0$ si y solo si $\bold{v}$ = 0.
La magnitud de un vector también se puede derivar usando el teorema de Pitágoras, como en la siguiente figura.
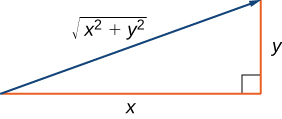
Hemos definido la multiplicación por un escalar y la suma de vectores geométricamente. La expresión de vectores en forma de componentes nos permite realizar estas mismas operaciones algebraicamente.
Sean $\bold{v} = ⟨x_1, y_1⟩$ y $\bold{w} = ⟨x_2, y_2⟩$ vectores, y sea $k$ un escalar.
Multiplicación escalar: $k\bold{v} = ⟨kx_1, ky_1⟩$
Suma de vectores: $\bold{v} + \bold{w} = ⟨x_1, y_1⟩ + ⟨x_2, y_2⟩ \\ = ⟨x_1 + x_2, y_1 + y_2⟩$
Realizar operaciones en forma componente
Sea $\bold{v}$ el vector con el punto inicial $(2,5)$ y el punto final $(8,13)$, y sea $\bold{w} = ⟨- 2,4⟩$.
Expresa $\bold{v}$ en forma de componente y encuentra $\|v\|$. Luego, usando álgebra, encuentra
Ahora que hemos establecido las reglas básicas de la aritmética vectorial, podemos establecer las propiedades de las operaciones vectoriales. Probaremos dos de estas propiedades. Las otras pueden ser probadas de manera similar.
Propiedades de las operaciones vectoriales
Sean $\bold{u}$, $\bold{v}$ y $\bold{w}$ vectores en un plano. Sean $r$ y $s$ escalares.
Propiedades de las operaciones vectoriales
Prueba de la propiedad conmutativa
Sea $\bold{u} = ⟨x_1, y_1⟩$ y $\bold{v} = ⟨x_2, y_2⟩$. Aplica la propiedad conmutativa para números reales:
$$\bold{u} + \bold{v} = ⟨x_1 + x_2, y_1 + y_2⟩ = ⟨x_2 + x_1, y_2 + y_1⟩ = \bold{v} + \bold{u}$$Prueba de la propiedad distributiva
Aplica la propiedad distributiva para números reales:
$$\begin{aligned} r(\bold{u} + \bold{v}) &= r ⋅ ⟨x_1 + x_2, y_1 + y_2⟩\\ &= ⟨r(x_1 + x_2), r(y_1 + y_2)⟩\\ &= ⟨rx_1 + rx_2, ry_1 + ry_2⟩\\ &= ⟨rx_1, ry_1⟩ + ⟨rx_2, ry_2⟩\\ &= r\bold{u} + r\bold{v} \end{aligned}$$Hemos encontrado los componentes de un vector dados sus puntos iniciales y finales. En algunos casos, solo podemos tener la magnitud y la dirección de un vector, no los puntos. Para estos vectores, podemos identificar los componentes horizontal y vertical usando trigonometría ().
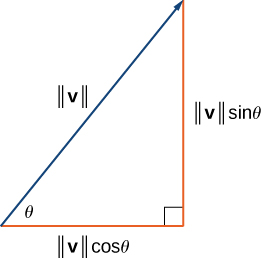
Considera el ángulo $θ$ formado por el vector $\bold{v}$ y el eje $x$ positivo. Podemos ver desde el triángulo que los componentes del vector $\bold{v}$ son $⟨\| \bold{v}\| cosθ, \| \bold{v}\| senθ⟩$. Por lo tanto, dado un ángulo y la magnitud de un vector, podemos usar el coseno y el seno del ángulo para encontrar las componentes del vector.
Forma componente
Encuentra la forma componente de un vector con magnitud 4 que forma un ángulo de -45° con el eje $x$.
Un vector unitario es un vector con magnitud 1. Para cualquier vector distinto de cero $\bold{v}$, podemos usar la multiplicación por un escalar para encontrar un vector unitario $\bold{u}$ que tenga la misma dirección que $\bold{v}$. Para hacer esto, multiplicamos el vector por el recíproco de su magnitud:
$$\bold{u} = \frac{1}{\|\bold{v}\|}\bold{v}$$Recuerda que cuando definimos la multiplicación escalar, notamos que $\| k\bold{v}\| = |k| ⋅ \|\bold{v}\|$. Para $\bold{u} = \frac{1}{\|\bold{v}\|}\bold{v}$, se deduce que $\|\bold{u}\| = \frac{1}{\|\bold{v}\|}(\|\bold{v}\|) = 1$. Decimos que $\bold{u}$ es el vector unitario en la dirección de $\bold{v}$ (). El proceso de usar la multiplicación escalar para encontrar un vector unitario con una dirección dada se llama normalización.

Encontrar un vector unitario
Dado $\bold{v} = ⟨1, 2⟩$.
Hemos visto lo conveniente que puede ser escribir un vector en forma de componente. Sin embargo, a veces es más conveniente escribir un vector como la suma de un vector horizontal y un vector vertical. Para facilitar esto, veamos los vectores unitarios estándar. Los vectores unitarios estándar son los vectores $\bold{i} = ⟨1, 0⟩$ y $\bold{j} = ⟨0, 1⟩$ ().

Al aplicar las propiedades de los vectores, es posible expresar cualquier vector en términos de $\bold{i}$ y $\bold{j}$ en lo que llamamos una combinación lineal:
$$\bold{v} = ⟨x, y⟩ = ⟨x, 0⟩ + ⟨0, y⟩ = x⟨1,0⟩ + y⟨0,1⟩ = x\bold{i} + y\bold{j}$$Por lo tanto, $\bold{v}$ es la suma de un vector horizontal con magnitud $x$, y un vector vertical con magnitud $y$, como en la siguiente figura.
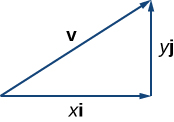
Usar vectores unitarios estándar
Debido a que los vectores tienen dirección y magnitud, son herramientas valiosas para resolver problemas que involucran aplicaciones tales como movimiento y fuerza. Recordemos el ejemplo del barco que describimos anteriormente. Aquí nos fijamos en otros dos ejemplos en detalle.
El auto de Jane está atrapado en el barro. Lisa y Jed vienen en un camión para ayudarla a sacarla. Atan un extremo de una correa de remolque a la parte delantera del automóvil y el otro extremo al enganche de remolque del camión, y el camión comienza a tirar. Mientras tanto, Jane y Jed se ponen detrás del auto y empujan. El camión genera una fuerza horizontal de 300 lb sobre el automóvil. Jane y Jed empujan ligeramente hacia arriba y generan una fuerza de 150 lb sobre el automóvil. Estas fuerzas pueden representarse mediante vectores, como se muestra en la . El ángulo entre estos vectores es de 15°. Encuentra la fuerza resultante (la suma de los vectores) y su magnitud a la décima de libra más cercana y, además, su ángulo de dirección desde el eje $x$ positivo.

Encontrar la velocidad resultante
Un avión vuela hacia el oeste a una velocidad de 425 mph. El viento sopla del noreste a 40 mph. ¿Cuál es la velocidad de avance del avión? ¿Cuál es el rumbo del avión?
Otra aplicación la encontramos en el cálculo de la resultante de varias fuerzas coplanares, con un método gráfico o analítico. La siguiente escena interactiva, muestra varios ejemplos de aplicación en la Física Estática.
A continuación, encontrarás varios ejercicios para que confrontes lo aprendido. Los ejercicios de numerales impares, presentan la solución.
Para los siguientes ejercicios, considera los puntos $P(-1,3)$, $Q(1,5)$ y $R(-3,7)$. Determina los vectores solicitados y expresa cada uno de ellos (a) en forma de componente y (b) utilizando los vectores unitarios estándar.
Para los siguientes ejercicios, usa los vectores dados $\bold{a}$ y $\bold{b}$.
$(1,0)$. Encuentra la magnitud del vector $\bold{a} - 3\bold{b} + 14\bold{i} - 14\bold{j}$.
Para los siguientes ejercicios, encuentra el vector $\bold{v}$ con la magnitud dada y en la misma dirección que el vector $\bold{u}$.
Para los siguientes ejercicios, encuentra la forma componente del vector $\bold{u}$, dada su magnitud y el ángulo que forma el vector con el eje $x$ positivo. Da respuestas exactas cuando sea posible.
Para los siguientes ejercicios, se proporciona el vector $\bold{u}$. Encuentra el ángulo $θ∈ [0,2π)$ que el vector $\bold{u}$ forma con la dirección positiva del eje $x$, en sentido antihorario.

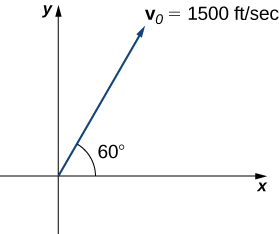
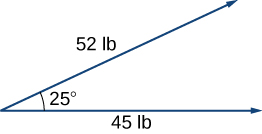
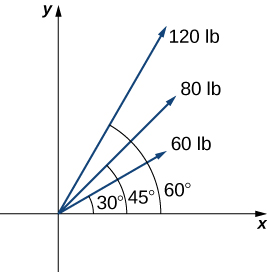
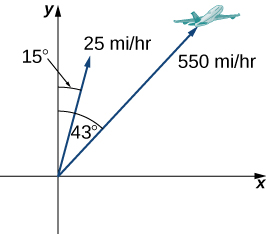
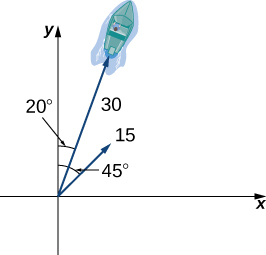
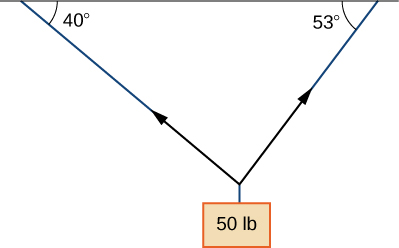
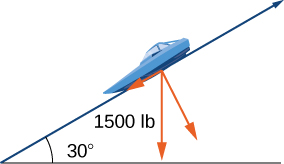
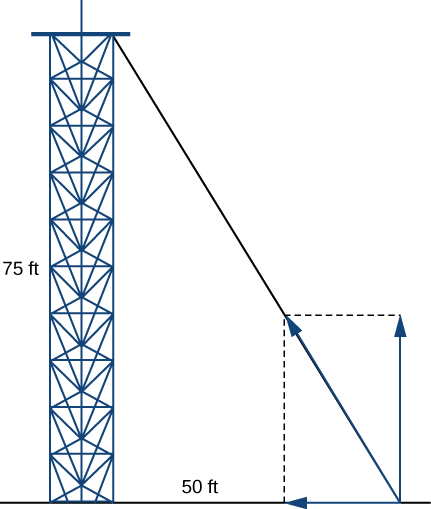
Los vectores son herramientas útiles para resolver problemas bidimensionales. La vida, sin embargo, ocurre en tres dimensiones. Para expandir el uso de vectores a aplicaciones más realistas, es necesario crear un marco para describir el espacio tridimensional. Por ejemplo, aunque un mapa bidimensional es una herramienta útil para navegar de un lugar a otro, en algunos casos la topografía del terreno es importante. ¿Tu ruta planeada va a través de las montañas? ¿Tienes que cruzar un río? Para apreciar completamente el impacto de estas características geográficas, debes usar tres dimensiones. Esta sección presenta una extensión natural del plano de coordenadas cartesianas bidimensional en tres dimensiones.
Como hemos aprendido, el sistema de coordenadas rectangulares bidimensionales contiene dos ejes perpendiculares: el eje horizontal $x$ y el eje vertical $y$. Podemos agregar una tercera dimensión, el eje $z$, que es perpendicular tanto al eje $x$ como al eje $y$. Llamamos a este sistema el sistema de coordenadas rectangulares tridimensionales. Representa las tres dimensiones que encontramos en la vida real.
El sistema de coordenadas rectangulares tridimensionales consta de tres ejes perpendiculares: el eje $x$, el eje $y$ y el eje $z$. Debido a que cada eje es una recta numérica que representa todos los números reales en $ℝ$, el sistema tridimensional a menudo se denota por $ℝ^3$.
En la (a), el eje $z$ positivo se muestra sobre el plano que contiene los ejes x e y. El eje $x$ positivo aparece a la izquierda y el eje $y$ positivo está a la derecha. Una pregunta natural es: ¿Cómo se determinó el acuerdo? El sistema que se muestra sigue la regla de la mano derecha. Si tomamos nuestra mano derecha y alineamos los dedos con el eje $x$ positivo, luego doblamos los dedos para que apunten en la dirección del eje $y$ positivo, nuestro pulgar apunta en la dirección del eje $z$ positivo. En este texto, siempre trabajamos con sistemas de coordenadas configurados de acuerdo con la regla de la mano derecha. Algunos sistemas siguen una regla de la mano izquierda, pero la regla de la mano derecha se considera la representación estándar.

En dos dimensiones, describimos un punto en el plano con las coordenadas $(x,y)$. Cada coordenada describe cómo se alinea el punto con el eje correspondiente. En tres dimensiones, se agrega una nueva coordenada, $z$, para indicar la alineación con el eje $z$: $(x,y,z)$. Un punto en el espacio se identifica por las tres coordenadas (). Para trazar el punto $(x,y,z)$, vaya $x$ unidades a lo largo del eje $x$, luego $y$ unidades en la dirección del eje $y$, luego, $z$ unidades en la dirección del eje $z$.

Localizando puntos en el espacio
Dibuja el punto $(1,-2,3)$ en el espacio tridimensional.
En la siguiente escena interactiva, diseñada por María José García Cebrian y Elena E. Álvarez Sáiz, puedes observar el punto del ejercicio anterior y, si lo deseas, modificar los valores del punto utilizando los pulsadores. Puedes, también, rotar el espacio con clic sostenido.
En el espacio bidimensional, el plano de coordenadas está definido por un par de ejes perpendiculares. Estos ejes nos permiten nombrar cualquier ubicación dentro del plano. En tres dimensiones, definimos planos de coordenadas por los ejes de coordenadas, tal como en dos dimensiones. Ahora hay tres ejes, por lo que hay tres pares de ejes que se intersecan. Cada par de ejes forma un plano de coordenadas: el plano $xy$, el plano $xz$ y el plano $yz$ ().
Definimos formalmente el plano $xy$ como el siguiente conjunto: ${(x,y,0): x, y ∈ ℝ}$. Del mismo modo, el plano $xz$ y el plano $yz$ se definen como ${(x,0,z): x, z ∈ ℝ}$ y ${(0,y,z): y, z∈ ℝ}$, respectivamente.
Para visualizar esto, imagina que estás construyendo una casa y estás parado en una habitación con solo dos de las cuatro paredes terminadas (supón que las dos paredes terminadas son adyacentes entre sí). Si te paras de espaldas a la esquina donde se encuentran las dos paredes terminadas, de frente a la habitación, el piso es el plano $xy$, la pared a tu derecha es el plano $xz$, y la pared a su izquierda es el plano $yz$.

En la siguiente escena interactiva, puedes observar con más detalle los planos al rotar el espacio con clic sostenido.
En dos dimensiones, los ejes de coordenadas dividen el plano en cuatro cuadrantes. Del mismo modo, los planos de coordenadas dividen el espacio entre ellos en ocho regiones alrededor del origen, llamadas octantes. Los octantes llenan $ℝ^3$ de la misma manera que los cuadrantes llenan $ℝ^2$, como se muestra en la .
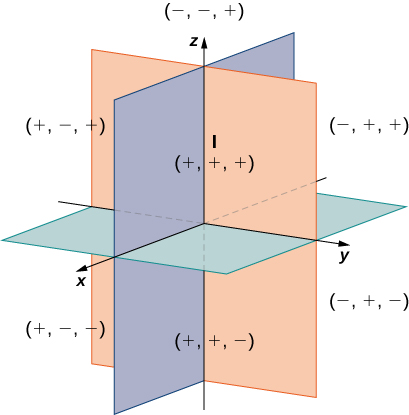
La mayoría del trabajo en el espacio tridimensional es una extensión cómoda de los conceptos correspondientes en dos dimensiones. En esta sección, usamos nuestro conocimiento de los círculos para describir las esferas, luego ampliamos nuestra comprensión de los vectores a tres dimensiones. Para lograr estos objetivos, comenzamos adaptando la fórmula de la distancia al espacio tridimensional.
Si dos puntos se encuentran en el mismo plano de coordenadas, entonces es sencillo calcular la distancia entre ellos. Consideramos que la distancia $d$ entre dos puntos $(x_1,y_1)$ y $(x_2,y_2)$ en el plano de coordenadas $xy$ viene dada por la fórmula
La fórmula para la distancia entre dos puntos en el espacio es una extensión natural de esta fórmula.
La distancia d entre puntos $(x_1, y_1, z_1)$ y $(x_2, y_2, z_2)$ viene dada por la fórmula
$$d = \sqrt{(x_2 - x_1)^2 + (y_2 - y_1)^2 + (z_2 - z_1)^2}\tag{$2.1$}$$La prueba de este teorema se deja como un ejercicio (sugerencia: Primero encuentra la distancia $d_1$ entre los puntos $(x_1,y_1,z_1)$ y $(x_2,y_2,z_2)$ como se muestra en la ).

Distancia en el espacio
Encuentra la distancia entre los puntos $P_1 = (3, -1, 5)$ y $P_2 = (2, 1, -1)$.

Antes de pasar a la siguiente sección, veamos cómo $ℝ^3$ difiere de $ℝ^2$. Por ejemplo, en $ℝ^2$, las rectas que no son paralelas siempre deben intersecarse. Este no es el caso en $ℝ^3$. Por ejemplo, considera la recta que se muestra en la . Estas dos rectas no son paralelas, ni se intersecan.
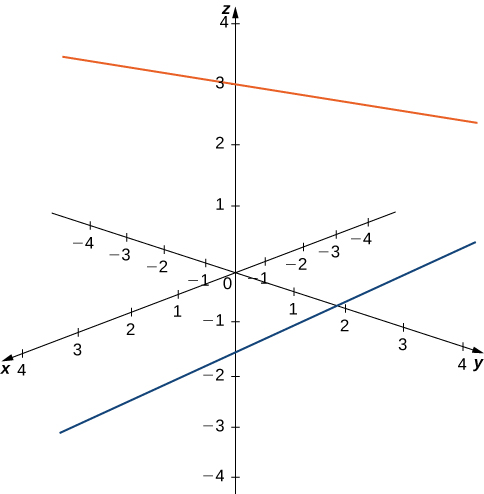
También puedes tener circunferencias que estén interconectadas pero que no tengan puntos en común, como en la .

Tenemos mucha más flexibilidad trabajando en tres dimensiones que si trabajamos con solo dos dimensiones.
Ahora que podemos representar puntos en el espacio y encontrar la distancia entre ellos, podemos aprender a escribir ecuaciones de objetos geométricos como rectas, curvas, planos y superficies n $ℝ^3$. Primero, comenzamos con una ecuación simple. Compara las gráficas de la ecuación $x = 0$ en $ℝ$, $ℝ^2$ y $ℝ^3$ ().
A partir de estos gráficos, podemos ver que la misma ecuación puede describir un punto, una recta o un plano.
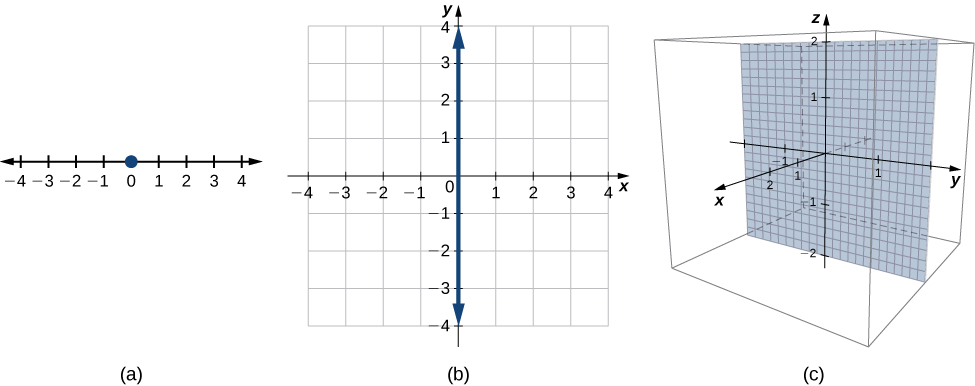
En el espacio, la ecuación $x = 0$ describe todos los puntos $(0, y, z)$. Esta ecuación define el plano $yz$. Del mismo modo, el plano $xy$ contiene todos los puntos de la forma $(x, y, 0)$. La ecuación $z = 0$ define el plano $xy$ y la ecuación $y = 0$ describe el plano $xz$ ().
Comprender las ecuaciones de los planos de coordenadas nos permite escribir una ecuación para cualquier plano que sea paralelo a uno de los planos de coordenadas. Cuando un plano es paralelo al plano $xy$, por ejemplo, la coordenada $z$ de cada punto en el plano tiene el mismo valor constante. Solo las coordenadas $x$ e $y$ de los puntos en ese plano varían de un punto a otro.

Regla: Ecuaciones de planos paralelos
Escribir ecuaciones de planos paralelos a planos coordinados
Como hemos visto, en $ℝ^2$ la ecuación $x = 5$ describe la recta vertical que pasa por el punto $(5, 0)$. Esta recta es paralela al eje $y$. En una extensión natural, la ecuación $x = 5$ en $ℝ^3$ describe el plano que pasa por el punto $(5, 0, 0)$, que es paralelo al plano $yz$. Otra extensión natural de una ecuación familiar se encuentra en la ecuación de una esfera.
Una esfera es el conjunto de todos los puntos en el espacio equidistantes de un punto fijo, el centro de la esfera (), así como el conjunto de todos los puntos en un plano que son equidistantes del centro representa una circunferencia. En una esfera, como en una circunferencia, la distancia desde el centro hasta un punto de la esfera se llama radio.

La ecuación de una circunferencia se deriva usando la fórmula de la distancia en dos dimensiones. Del mismo modo, la ecuación de una esfera se basa en la fórmula tridimensional de la distancia.
La esfera con centro $(a, b, c)$ y radio $r$ puede representarse mediante la ecuación
$$(x - a)^2+ (y - b)^2+ (z - c)^2 = r^2\tag{$2.2$}$$Esta ecuación se conoce como la ecuación estándar de una esfera.
Encontrar una ecuación de una esfera
Encuentra la ecuación estándar de la esfera con centro $(10, 7, 4)$ y punto $(-1, 3, -2)$, como se muestra en la .
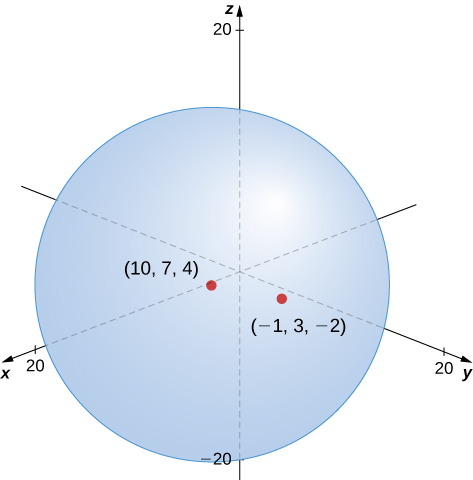
Encontrar una ecuación de una esfera
Supongamos que $P = (- 5, 2, 3)$ y $Q = (3, 4, -1)$, y supongamos que el segmento de recta $PQ$ forma el diámetro de una esfera (). Encuentra la ecuación de la esfera. .
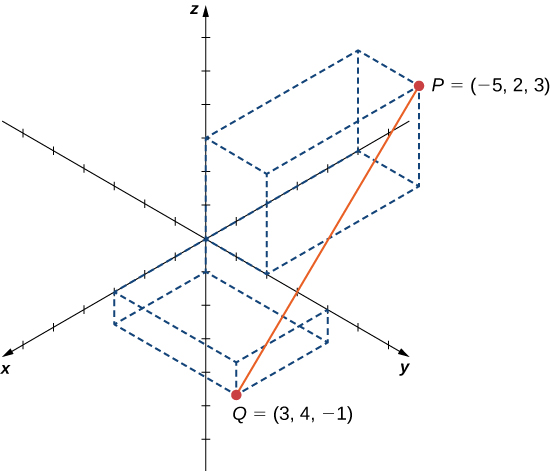
En la siguiente escena interactiva, puedes apreciar los resultados del ejercicio anterior (recuerda que puedes rotar el espacio).
Graficar otras ecuaciones en tres dimensiones
Describe el conjunto de puntos que satisface $(x - 4)(z - 2) = 0$, y grafica el conjunto.
Graficar otras ecuaciones en tres dimensiones
Describe el conjunto de puntos que satisface $(x - 2)^2 + (y - 1)^2 = 4$, y grafica el conjunto.
Al igual que los vectores bidimensionales, los vectores tridimensionales son cantidades con magnitud y dirección, y están representados por segmentos de recta dirigidos (flechas). Con un vector tridimensional, usamos una flecha tridimensional.
Los vectores tridimensionales también se pueden representar en forma de componente. La notación $\bold{v} = ⟨x, y, z⟩$ es una extensión natural del caso bidimensional, que representa un vector con el punto inicial en el origen, $(0, 0, 0)$ y el punto final $(x, y, z)$.
El vector cero es $\bold{0} = ⟨0, 0, 0⟩$. Entonces, por ejemplo, el vector tridimensional $\bold{v} = ⟨2, 4, 1⟩$ está representado por un segmento de línea dirigidos desde el punto $(0, 0, 0)$ al punto $(2, 4, 1)$ ().

La suma vectorial y la multiplicación por un escalar se definen de manera análoga al caso bidimensional. Si $\bold{v} = ⟨x_1, y_1, z_1⟩$ y $\bold{w} = ⟨x_2, y_2, z_2⟩$ son vectores y $k$ es un escalar, entonces
$$\bold{v} + \bold{w} = ⟨x_1 + x_2, y_1 + y_2, z_1 + z_2⟩\; y\; k\bold{v} = ⟨kx_1, ky_1, kz_1⟩$$Si $k = -1$, entonces $k\bold{v} = (- 1)\bold{v}$ se escribe como $-\bold{w}$, y la resta vectorial se define por $\bold{v} - \bold{w} = \bold{v} + (-\bold{w}) = \bold{v} + (-1)\bold{w}$.
Los vectores unitarios estándar también se extienden fácilmente en tres dimensiones:
$\bold{i} = ⟨1, 0, 0⟩ , \bold{j} = ⟨0, 1, 0⟩\; y\; \bold{k} = ⟨0, 0 ,1⟩$, y los usamos de la misma forma en que usamos los vectores unitarios estándar en dos dimensiones. Por lo tanto, podemos representar un vector en $ℝ^3$ de la siguiente manera:
$$\bold{v} = ⟨x, y, z⟩ = x\bold{i} + y\bold{j} + z\bold{k}$$
Representaciones vectoriales
Sea $\overrightarrow{PQ}$ el vector con el punto inicial $P = (3, 12, 6)$ y el punto terminal $Q = (- 4, -3, 2)$ como se muestra en la . Expresa $\overrightarrow{PQ}$ en ambos componentes y utilizando vectores unitarios estándar.

Como se describió anteriormente, los vectores en tres dimensiones se comportan de la misma manera que los vectores en un plano. La interpretación geométrica de la suma de vectores, por ejemplo, es la misma en el espacio bidimensional y tridimensional, tal como se aprecia en la .
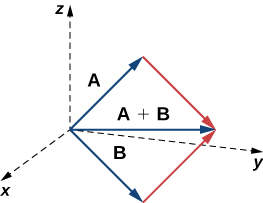
Ya hemos visto cómo algunas de las propiedades algebraicas de los vectores, como la suma de vectores y la multiplicación por un escalar, pueden extenderse a tres dimensiones.
Otras propiedades pueden ampliarse de manera similar. Se resumen aquí para nuestra referencia.
Sean $\bold{v} = ⟨x_1, y_1, z_1⟩$ y $\bold{w} = ⟨x_2, y_2, z_2⟩$ vectores, y sea $k$ un escalar.
Multiplicación escalar: $k\bold{v} = ⟨kx_1, ky_1, kz_1⟩$
Suma de vectores: $\bold{v} + \bold{w} = ⟨x_1, y_1, z_1⟩ + ⟨x_2, y_2, z_2⟩ = ⟨x_1 + x_2, y_1 + y_2, z_1 + z_2⟩$
Resta de vectores: $\bold{v} - \bold{w} = ⟨x_1, y_1, z_1⟩ - ⟨x_2, y_2, z_2⟩ = ⟨x_1 - x_2, y_1 - y_2, z_1 - z_2⟩$
Magnitud del vector: $\|\bold{v}\| = \sqrt{x_1^2 + y_1^2 + z_1^2}$
Vector unitario en la dirección de $\bold{v}$: $\frac{1}{\|\bold{v}\|}\bold{v} = \frac{1}{\|\bold{v}\|}⟨x_1, y_1, z_1⟩ = \bigg⟨\frac{x_1}{\|\bold{v}\|}, \frac{y_1}{\|\bold{v}\|}, \frac{z_1}{\|\bold{v}\|}\bigg⟩$, si $\bold{v} ≠\ 0$
Hemos visto que la adición de vectores en dos dimensiones satisface las propiedades inversas conmutativas, asociativas y aditivas. Estas propiedades de las operaciones vectoriales también son válidas para vectores tridimensionales. La multiplicación por un escalar de vectores satisface la propiedad distributiva, y el vector cero actúa como una identidad aditiva. Las pruebas para verificar estas propiedades en tres dimensiones son extensiones directas de las pruebas en dos dimensiones.
Del libro Geometría analítica del espacio, cuyas autoras son María José García Cebrian y Elena E. Álvarez Sáiz, hemos tomado la siguiente escena interactiva, para que practiques y comprendas mejor algunas propiedades de los vectores en el espacio.
Operaciones vectoriales en tres dimensiones
Sean $\bold{v} = ⟨- 2, 9, 5⟩$ y $\bold{w} = ⟨1, -1, 0⟩$ (). Encuentra los siguientes vectores.

Lanzar un pase hacia adelante
Un mariscal de campo está de pie en el campo de fútbol preparándose para lanzar un pase. Su receptor está parado 20 yardas por el campo y 15 yardas a la izquierda del mariscal de campo. El mariscal de campo lanza la pelota a una velocidad de 60 mph hacia el receptor en un ángulo ascendente de 30° (ver la siguiente figura). Escribe el vector de velocidad inicial de la pelota, $\bold{v}$, en forma de componente.

A continuación, presentamos los ejercicios propuestos para esta sesión. Recuerda que los ejercicios correspondientes a numerales impares, presentan la solución.
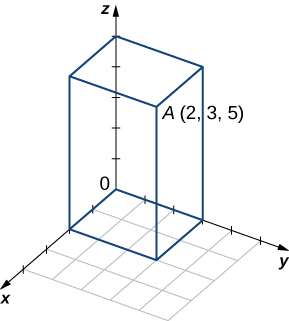
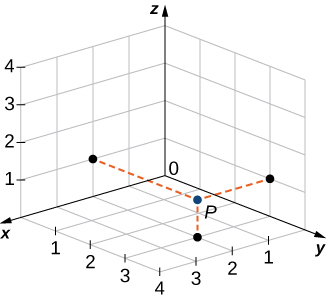
Para los siguientes ejercicios, describe y grafica el conjunto de puntos que satisface la ecuación dada.
Para los siguientes ejercicios, encuentra la ecuación de la esfera en forma estándar que satisfaga las condiciones dadas.
Para los siguientes ejercicios, encuentra el centro y el radio de la esfera con una ecuación en forma general que se proporciona.
Para los siguientes ejercicios, expresa el vector $\overrightarrow{PQ}$ con el punto inicial en $P$ y el punto final en $Q$
Para los siguientes ejercicios, usa los vectores $\bold{a}$ y $\bold{b}$ dados para encontrar y expresar los vectores $\bold{a}$ + $\bold{b}$, 4$\bold{a}$ y -5$\bold{a}$ + 3$\bold{b}$ en forma de componente.
Para los siguientes ejercicios, se dan los vectores $\bold{u}$ y $\bold{v}$. Encuentra las magnitudes de los vectores $\bold{u} - \bold{v}$ y -2$\bold{u}$.
Para los siguientes ejercicios, encuentra el vector unitario en la dirección del vector dado $\bold{a}$ y exprésalo usando vectores unitarios estándar.
Para los siguientes ejercicios, encuentra el vector $\bold{u}$ con una magnitud dada y que satisfaga las condiciones dadas.
Sean $\bold{F_1} = ⟨10,6,3⟩, \bold{F2} = ⟨0,4,9⟩$, y $\bold{F_3} = ⟨10, -3, -9⟩$ tres fuerzas que actúan sobre una caja. Encuentra la fuerza $\bold{F_4}$ que actúa sobre la caja de modo que la caja esté en equilibrio estático. Expresa la respuesta en forma de componente (Solución).
Expresa las respuestas usando vectores unitarios estándar.

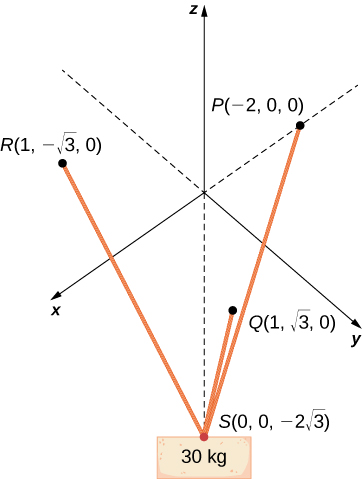
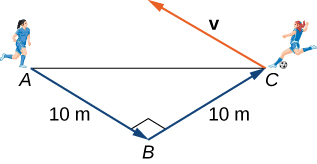
Si aplicamos una fuerza a un objeto para que el objeto se mueva, decimos que el trabajo lo realiza la fuerza. En las aplicaciones de la integración observamos una fuerza constante y asumimos que la fuerza se aplica en la dirección del movimiento del objeto. En esas condiciones, el trabajo puede expresarse como el producto de la fuerza que actúa sobre un objeto y la distancia que se mueve el objeto. En este capítulo, sin embargo, hemos visto que tanto la fuerza como el movimiento de un objeto pueden representarse mediante vectores.
En esta sección, desarrollaremos una operación llamada producto punto, que nos permite calcular el trabajo en el caso en que el vector de fuerza y el vector de movimiento tienen direcciones diferentes. El producto punto esencialmente nos dice cuánto del vector de fuerza se aplica en la dirección del vector de movimiento. El producto punto también puede ayudarnos a medir el ángulo formado por un par de vectores y la posición de un vector en relación con los ejes de coordenadas. Incluso proporciona una prueba simple para determinar si dos vectores se encuentran en ángulo recto.
Ya hemos aprendido cómo sumar y restar vectores. En este capítulo, investigamos dos tipos de multiplicación de vectores. El primer tipo de multiplicación entre vectores se llama producto punto, en función de la notación que usamos para él, y se define de la siguiente manera:
El producto punto de los vectores $\bold{u} = ⟨u_1, u_2, u_3⟩$ y $\bold{v} = ⟨v_1, v_2, v_3⟩$ viene dado por la suma de los productos de los componentes
$$\bold{u} ⋅ \bold{v} = u_1v_1 + u_2v_2 + u_3v_3\tag{$2.3$}$$Observa que si $\bold{u}$ y $\bold{v}$ son vectores bidimensionales, calculamos el producto escalar de manera similar. Por lo tanto, si $\bold{u} = ⟨u_1, u_2⟩$ y $\bold{v} = ⟨v_1, v_2⟩$, entonces
$$\bold{u} ⋅ \bold{v} = u_1v_1 + u_2v_2$$Cuando dos vectores se combinan bajo suma o resta, el resultado es un vector. Cuando dos vectores se combinan usando el producto punto, el resultado es un escalar. Por esta razón, el producto punto a menudo se llama producto escalar. También se le puede llamar el producto interno.
Calculando productos punto
Al igual que la suma y resta de vectores, el producto punto tiene varias propiedades algebraicas. Probamos tres de estas propiedades y dejamos el resto como ejercicios.
Propiedades del producto de punto
Sean $\bold{u}, \bold{v}$ y $\bold{w}$ vectores, y $c$ un escalar.
Prueba
Sea $\bold{u} = ⟨u_1, u_2, u_3⟩$ y $\bold{v} = ⟨v_1, v_2, v_3⟩$. Luego
$$\begin{aligned} \bold{u} ⋅ \bold{v} &= ⟨u_1,u_2,u_3⟩ ⋅ ⟨v_1,v_2,v_3⟩\\ &= u_1 v_1 + u_2 v_2 + u_3 v_3\\ &= v_1 u_1 + v_2 u_2 + v_3 u_3\\ &= ⟨v_1,v_2,v_3⟩ ⋅ ⟨u_1,u_2,u_3⟩\\ &= \bold{v} ⋅ \bold{u} \end{aligned}$$La propiedad asociativa se parece a la propiedad asociativa para la multiplicación de números reales, pero presta mucha atención a la diferencia entre los objetos escalares y vectoriales:
La prueba de que $c(\bold{u} ⋅ \bold{v}) = \bold{u} ⋅ (c\bold{v})$ es similar.
La cuarta propiedad muestra la relación entre la magnitud de un vector y su producto punto consigo mismo:
$$\begin{aligned} \bold{v} ⋅ \bold{v} &= ⟨v_1,v_2,v_3⟩ ⋅ ⟨v_1,v_2,v_3⟩\\ &= (v_1)^2+(v_2)^2+(v_3)^2\\ &= \bigg[\sqrt{(v_1)^2+(v_2)^2+(v_3)^2}\bigg]^2\\ &= \|\bold{v}\|^2 \end{aligned}$$Observa que la definición del producto punto produce $0 ⋅ \bold{v} = \bold{0}$. Por propiedad iv., si $\bold{v} ⋅ \bold{v} = 0$, entonces $\bold{v} = \bold{0}$.
Usando las propiedades del producto punto
Sean $\bold{a} = ⟨1,2, -3⟩$, $\bold{b} = ⟨0,2,4⟩$, y $\bold{c} = ⟨5, -1,3⟩$. Encuentra cada uno de los siguientes productos.
Cuando dos vectores distintos de cero se colocan en posición estándar, ya sea en dos dimensiones o en tres dimensiones, forman un ángulo entre ellos (). El producto punto proporciona una forma de encontrar la medida de este ángulo. Esta propiedad es el resultado del hecho de que podemos expresar el producto escalar en términos del coseno del ángulo formado por dos vectores.

Evaluación de un producto punto
El producto punto de dos vectores es el producto de la magnitud de cada vector y el coseno del ángulo entre ellos:
$$\bold{u} ⋅ \bold{v} = \|\bold{u}\|\|\bold{v}\|cosθ\tag{$2.4$}$$Prueba
Coloca los vectores $\bold{u}$ y $\bold{v}$ en la posición estándar y considera el vector $\bold{v} - \bold{u}$ (). Estos tres vectores forman un triángulo con longitudes laterales $\|\bold{u}\|, \|\bold{v}\|$ y $\|\bold{v} - \bold{u}\|$.
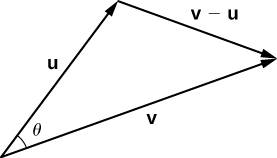
En la página siguiente puedes observar e interactuar con el triángulo en una escena tridimensional.
Recordemos de la trigonometría que la ley de los cosenos describe la relación entre las longitudes laterales del triángulo y el ángulo $θ$. La aplicación de la ley de cosenos aquí da
$$\|\bold{v} - \bold{u}\| = \|\bold{u}\|^2 + \|\bold{v}\|^2 - 2\|\bold{u}\|\|\bold{v}\|cosθ$$El producto punto proporciona una forma de reescribir el lado izquierdo de esta ecuación:
$$\begin{aligned} \|\bold{v} - \bold{u}\|^2 &= (\bold{v}-\bold{u}) ⋅ (\bold{v}-\bold{u})\\ &= (\bold{v}-\bold{u}) ⋅ \bold{v}-(\bold{v}-\bold{u}) ⋅ \bold{u}\\ &= \bold{v} ⋅ \bold{v}-\bold{u} ⋅ \bold{v}-\bold{v} ⋅ \bold{u}+\bold{u} ⋅ \bold{u}\\ &= \bold{v} ⋅ \bold{v}-\bold{u} ⋅ \bold{v}-\bold{u} ⋅ \bold{v}+\bold{u} ⋅ \bold{u}\\ &= \|\bold{v}\|^2-2\bold{u} ⋅ \bold{v}+\|\bold{u}\|^2 \end{aligned}$$Aplicando la ley de cosenos
$$\begin{aligned} \|\bold{v} - \bold{u}\|^2 &= \|\bold{u}\|^2+\|\bold{v}\|^2-2\|\bold{u}\|\|\bold{v}\|cosθ\\ \|\bold{v}\|^2-2\bold{u} ⋅ \bold{v}+\|\bold{u}\|^2 &= \|\bold{u}\|^2+\|\bold{v}\|^2-2\|\bold{u}\|\|\bold{v}\|cosθ\\ -2\bold{u} ⋅ \bold{v} &= -2\|\bold{u}\|\|\bold{v}\|cosθ\\ \bold{u} ⋅ \bold{v} &= \|\bold{u}\|\|\bold{v}\|cosθ \end{aligned}$$Podemos usar esta expresión para encontrar la medida del ángulo entre dos vectores distintos de cero. La siguiente ecuación reorganiza la ecuación 2.3 para resolver el coseno del ángulo:
$$cosθ = \frac{\bold{u} ⋅ \bold{v}}{\|\bold{u}\|\|\bold{v}\|}\tag{$2.5$}$$Usando esta ecuación, podemos encontrar el coseno del ángulo entre dos vectores distintos de cero. Como estamos considerando el ángulo más pequeño entre los vectores, suponemos $0°\leθ\le 180°$ (o $0\leθ\leπ$ si estamos trabajando en radianes). El coseno inverso es único en este rango, por lo que podemos determinar el ángulo $θ$.
Encontrar el ángulo entre dos vectores
Encuentra la medida del ángulo entre cada par de vectores.
El ángulo entre dos vectores puede ser agudo ($0 \lt cosθ\lt 1$), obtuso ($-1 \lt cosθ \lt 0$) o llano ($cosθ = -1$). Si $cosθ = 1$, ambos vectores tienen la misma dirección. Si $cosθ = 0$, entonces los vectores, cuando se colocan en posición estándar, forman un ángulo recto (). Podemos formalizar este resultado en un teorema con respecto a los vectores ortogonales (perpendiculares).
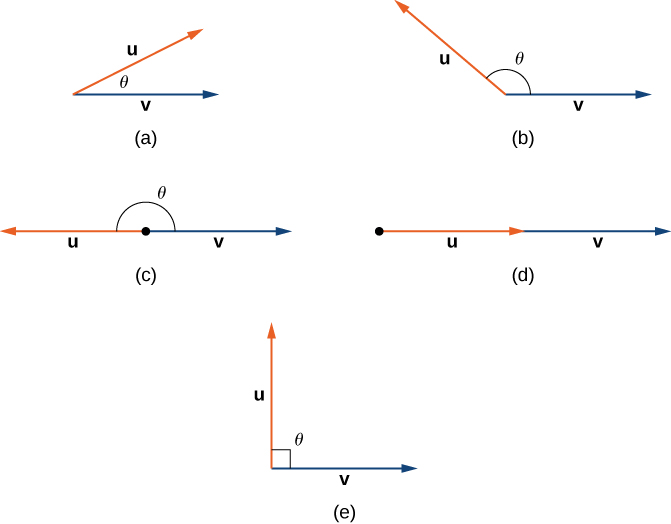
Vectores ortogonales
Los vectores distintos de cero $\bold{u}$ y $\bold{v}$ son vectores ortogonales si y solo si $\bold{u} ⋅ \bold{v} = 0$.
Prueba
Supongamos que $\bold{u}$ y $\bold{v}$ son vectores distintos de cero y que $θ$ denota el ángulo entre ellos. Primero, supón que $\bold{u} ⋅ \bold{v} = 0$. Luego
$$\|\bold{u}\|\|\bold{v}\|cosθ = 0$$Sin embargo, $\|\bold{u}\| ≠ 0$ y $\|\bold{v}\| ≠ 0$, por lo que debemos tener $cosθ = 0$. Por lo tanto, $θ = 90°$, y los vectores son ortogonales.
Ahora supón que $\bold{u}$ y $\bold{v}$ son ortogonales. Entonces $θ = 90°$ y tenemos
$$\bold{u} ⋅ \bold{v} = \|\bold{u}\|\|\bold{v}\|cosθ = \|\bold{u}\|\|\bold{v}\|cos90° = \|\bold{u}\|\|\bold{v}\| ⋅ 0 = 0$$Los términos ortogonal, perpendicular y normal indican que los objetos matemáticos se cortan en ángulo recto. El uso de cada término está determinado principalmente por su contexto. Decimos que los vectores son ortogonales y las rectas son perpendiculares. El término normal se usa con mayor frecuencia cuando se mide el ángulo hecho con un plano u otra superficie.
En la siguiente escena interactiva (adaptación de una escena del libro Geometría analítica del espacio), modifica los vectores y observa qué ocurre.
Identificando vectores ortogonales
Determina si $p = ⟨1,0,5⟩ $ y $q = ⟨10,3, -2⟩ $ son vectores ortogonales.
Medición del ángulo formado por dos vectores
Dado = $⟨2,3,3⟩$. Encuentra las medidas de los ángulos formados por los siguientes vectores.
El ángulo que forma un vector con cada uno de los ejes de coordenadas, llamado ángulo director, es muy importante en los cálculos prácticos, especialmente en un campo como la ingeniería. Por ejemplo, en ingeniería astronáutica, el ángulo en el que se lanza un cohete debe determinarse con mucha precisión. Un error muy pequeño en el ángulo puede hacer que el cohete se desplace cientos de millas. Los ángulos directores a menudo se calculan utilizando el producto escalar y los cosenos de los ángulos, llamados cosenos directores. Por lo tanto, definimos ambos ángulos y sus cosenos.

En el ejercicio anterior, los cosenos directores de $\bold{v} = ⟨2,3,3⟩$ son $cosα = \frac{2}{\sqrt{22}}, cosβ = \frac{3}{\sqrt{22}}\; y \; cosγ = \frac{3}{\sqrt{22}}$. Los ángulos directores de $\bold{v}$ son $α = 1.130rad, β = 0.877rad\; y\; γ = 0.877rad$.
Hasta ahora, nos hemos centrado principalmente en vectores relacionados con la fuerza, el movimiento y la posición en el espacio físico tridimensional. Sin embargo, los vectores a menudo se usan de formas más abstractas. Por ejemplo, supongamos que un vendedor de frutas vende manzanas, plátanos y naranjas. En un día determinado, vende 30 manzanas, 12 plátanos y 18 naranjas. Podrías usar un vector de cantidad, $\bold{q} = ⟨30,12,18⟩$, para representar la cantidad de fruta que vendió ese día.
De manera similar, podrías usar un vector de precios, $\bold{p} = ⟨0.50,0.25,1⟩$, para indicar que vende sus manzanas por 50 ¢ cada una, plátanos por 25 ¢ cada una y naranjas por $ 1 cada una. En este ejemplo, aunque todavía podríamos graficar estos vectores, no los interpretamos como representaciones literales de posición en el mundo físico. Simplemente estamos usando vectores para realizar un seguimiento de piezas particulares de información sobre manzanas, plátanos y naranjas.
Esta idea puede parecer un poco extraña, pero si simplemente consideramos los vectores como una forma de ordenar y almacenar datos, descubrimos que pueden ser una herramienta bastante poderosa. Volviendo al vendedor de frutas, pensemos en el producto punto, $\bold{q} ⋅ \bold{p}$. Lo calculamos multiplicando el número de manzanas vendidas (30) por el precio por manzana (50 ¢), el número de plátanos vendidos por el precio por plátano y el número de naranjas vendidas por el precio por naranja. Luego agregamos todos estos valores juntos. Entonces, en este ejemplo, el producto punto nos dice cuánto dinero tenía el vendedor de frutas en ventas ese día en particular.
Cuando usamos vectores de esta manera más general, no hay razón para limitar el número de componentes a tres. ¿Qué pasa si el vendedor de fruta decide comenzar a vender toronja? En ese caso, le gustaría usar vectores de cantidad y precio de cuatro dimensiones para representar la cantidad de manzanas, plátanos, naranjas y toronjas vendidas, y sus precios unitarios. Como es de esperar, para calcular el producto escalar de los vectores de cuatro dimensiones, simplemente agregamos los productos de los componentes como antes, pero la suma tiene cuatro términos en lugar de tres.
AAA Party Supply Store vende invitaciones, favores de fiesta, decoraciones y artículos para el servicio de alimentos como platos de papel y servilletas. Cuando AAA compra su inventario, paga 25 ¢ por paquete por invitaciones y favores de fiesta. Las decoraciones cuestan 50 ¢ cada una, y los artículos de servicio de comida cuestan 20 ¢ por paquete. AAA vende invitaciones por $\text{\$}$ 2.50 por paquete y favores de fiesta por $\text{\$}$ 1.50 por paquete. Las decoraciones se venden por $\text{\$}$4.50 cada una y los artículos de servicio de comida por $\text{\$}$ 1.25 por paquete.
Durante el mes de mayo, AAA Party Supply Store vende 1258 invitaciones, 342 favores de fiesta, 2426 decoraciones y 1354 artículos de servicio de alimentos. Usa vectores y productos punto para calcular cuánto dinero ganó AAA en ventas durante el mes de mayo. ¿Cuánto ganó la tienda en ganancias?
Como hemos visto, la suma combina dos vectores para crear un vector resultante. Pero, ¿qué pasa si se nos da un vector y necesitamos encontrar sus partes componentes? Utilizamos proyecciones vectoriales para realizar el proceso opuesto; puedes descomponer un vector en sus componentes. La magnitud de una proyección vectorial es una proyección escalar. Por ejemplo, si un niño tira del asa de un vagón en un ángulo de 55°, podemos usar proyecciones para determinar qué parte de la fuerza sobre el asa está realmente moviendo el vagón hacia adelante ().
Volveremos a este ejemplo y aprenderemos cómo resolverlo después de ver cómo calcular las proyecciones.
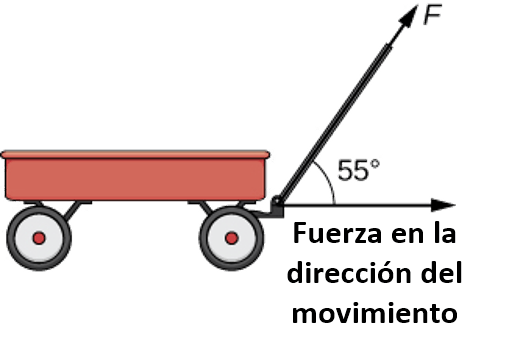
Analiza la definición de la siguiente página y luego interactúa (en pantalla ampliada) con la siguiente escena interactiva (adaptación de una escena del libro Geometría analítica del espacio)
La proyección vectorial de $\bold{v}$ sobre $\bold{u}$ es el vector etiquetado como $proy_u\bold{v}$ en la . Tiene el mismo punto inicial que $\bold{u}$ y $\bold{v}$ y la misma dirección que $\bold{u}$, y representa la componente de $\bold{v}$ que actúa en la dirección de $\bold{u}$. Si $θ$ representa el ángulo entre $\bold{u}$ y $\bold{v}$, entonces, por las propiedades de los triángulos, sabemos que la longitud de $proy_u\bold{v}$ es $\|proy_u\bold{v}\| = \|\bold{v}\|cosθ$. Al expresar $cosθ$ en términos del producto escalar, esto se convierte en
$$\begin{aligned} \|proy_u\bold{v}\| &= \|\bold{v}\|cosθ\\ &= \|\bold{v}\|\bigg(\frac{|\bold{u} ⋅ \bold{v}|}{\|\bold{u}\|\|\bold{v}\|}\bigg)\\ &= \frac{|\bold{u} ⋅ \bold{v}|}{\|\bold{u}\|} \end{aligned}$$Ahora multiplicamos por un vector unitario en la dirección de $\bold{u}$ para obtener $proy_u\bold{v}$:
$$proy_u\bold{v} = \frac{\bold{u} ⋅ \bold{v}}{\|\bold{u}\|}\bigg(\frac{1}{\|\bold{u}\|}u\bigg) = \frac{\bold{u} ⋅ \bold{v}}{\|\bold{u}\|^2}u\tag{$2.6$}$$La longitud de este vector también se conoce como la proyección escalar de $\bold{v}$ sobre $\bold{u}$ y se denota por
$$\|proy_u\bold{v}\| = comp_u\bold{v} = \frac{\bold{u} ⋅ \bold{v}}{\|\bold{u}\|}\tag{$2.7$}$$Si comparaste la definición con la escena interactiva, habrás notado que en la primera se define $\|proy_u\bold{v}\| = \frac{\bold{u} ⋅ \bold{v}}{\|\bold{u}\|}$, mientras que en la escena interactiva se tiene $\|proy_v\bold{u}\| = \frac{\bold{u} ⋅ \bold{v}}{\|\bold{v}\|}$; es decir, en una se obtiene la proyección de $\bold{v}$ sobre $\bold{u}$ y, en la escena, la proyección de $\bold{u}$ sobre $\bold{v}$. Veamos un ejemplo:
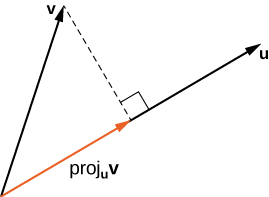
Encontrar proyecciones
Encuentra la proyección de $\bold{v}$ sobre $\bold{u}$.
A veces es útil descomponer vectores, es decir, separar un vector en una suma. Este proceso se llama resolución de un vector en componentes. Las proyecciones nos permiten identificar dos vectores ortogonales que tienen una suma deseada. Por ejemplo, sea $\bold{v} = ⟨6, -4⟩$ y sea $\bold{u} = ⟨3,1⟩$. Queremos descomponer el vector $\bold{v}$ en componentes ortogonales de modo que uno de los vectores componentes tenga la misma dirección que $\bold{u}$.
Primero encontramos el componente que tiene la misma dirección que $\bold{u}$ proyectando $\bold{v}$ sobre $\bold{u}$. Sea $\bold{p} = proy_\bold{u}\bold{v}$. Entonces tenemos
$$\begin{aligned} \bold{p} &= \frac{\bold{u} ⋅ \bold{v}}{\|\bold{u}\|}\bigg(\frac{1}{\|\bold{u}\|}u\bigg) = \frac{\bold{u} ⋅ \bold{v}}{\|\bold{u}\|^2}u = \frac{18-4}{9+1}\bold{u}\\ &= \frac{7}{5}\bold{u}\ = \frac{7}{5}⟨3,1⟩ = \bigg⟨\frac{21}{5}, \frac{7}{5} \bigg⟩ \end{aligned}$$Ahora considera el vector $\bold{q} = \bold{v} - \bold{p}$. Tenemos
$$\begin{aligned} \bold{q} &= \bold{v} - \bold{p}\\ &= ⟨6,-4⟩ - \bigg⟨\frac{21}{5}, \frac{7}{5} \bigg⟩ = \bigg⟨\frac{9}{5}, -\frac{27}{5} \bigg⟩ \end{aligned}$$Claramente, por la forma en que definimos $\bold{q}$, tenemos $\bold{v} = \bold{q} + \bold{p}$, y
$$\begin{aligned} \bold{q} ⋅ \bold{p} &= \bigg⟨\frac{9}{5}, -\frac{27}{5} \bigg⟩ ⋅ \bigg⟨\frac{21}{5}, \frac{7}{5} \bigg⟩\\ &= \frac{9(21)}{25} + \frac{-27(7)}{25} = \frac{189}{25} - \frac{189}{25} = 0 \end{aligned}$$Por lo tanto, $\bold{q}$ y $\bold{p}$ son ortogonales.
Resolviendo vectores en componentes
Expresa $\bold{v} = ⟨8, -3, -3⟩$ como una suma de vectores ortogonales de modo que uno de los vectores tenga la misma dirección que $\bold{u} = ⟨2,3,2⟩$
Proyección Escalar de Velocidad
Un barco de contenedores sale del puerto y viaja 15° al noreste. Su motor genera una velocidad de 20 nudos a lo largo de ese camino (ver la siguiente figura). Además, la corriente oceánica mueve el barco hacia el noreste a una velocidad de 2 nudos. Considerando tanto el motor como la corriente, ¿qué tan rápido se mueve el barco en la dirección 15° al noreste? Redondea la respuesta a dos decimales.
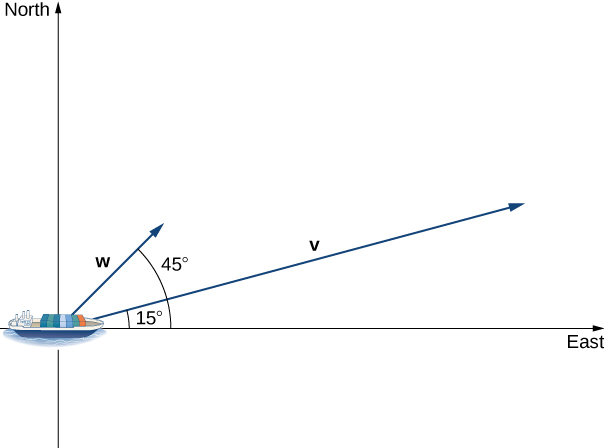
Ahora que entendemos el producto punto, podemos ver cómo aplicarlos a situaciones de la vida real. La aplicación más común del producto escalar de dos vectores está en el cálculo del trabajo.
Por física, sabemos que el trabajo se realiza cuando un objeto es movido por una fuerza. Cuando la fuerza es constante y se aplica en la misma dirección en que se mueve el objeto, definimos el trabajo realizado como el producto de la fuerza y la distancia que recorre el objeto: $\bold{W} = \bold{F}d$. Vimos varios ejemplos de este tipo en capítulos anteriores.
Ahora imagina que la dirección de la fuerza es diferente de la dirección del movimiento, como en el ejemplo de un niño que tira de un carro. Para encontrar el trabajo realizado, necesitamos multiplicar el componente de la fuerza que actúa en la dirección del movimiento por la magnitud del desplazamiento. El producto punto nos permite hacer precisamente eso. Si representamos una fuerza aplicada por un vector $\bold{F}$ y el desplazamiento de un objeto por un vector $\bold{s}$, entonces el trabajo realizado por la fuerza es el producto escalar de $\bold{F}$ y $\bold{s}$.
Cuando se aplica una fuerza constante a un objeto para que el objeto se mueva en línea recta desde el punto P al punto Q, el trabajo $\bold{W}$ realizado por la fuerza $\bold{F}$, que actúa en un ángulo $θ$ desde la línea de movimiento, viene dado por
$$\bold{W} = \bold{F} ⋅ \overrightarrow{PQ} = \|\bold{F}\|\|\overrightarrow{PQ}\|cosθ\tag{$2.8$}$$Volvamos al problema del carro del niño presentado anteriormente. Supongamos que un niño tira de un carro con una fuerza que tiene una magnitud de 8 lb sobre el mango en un ángulo de 55°. Si el niño tira de la carreta 50 pies, encuentra el trabajo realizado por la fuerza ().
Tenemos
$$\bold{W} = \|\bold{F}\|\|\overrightarrow{PQ}\|cosθ = 8 ⋅ 50 ⋅ cos(55°) \approx 229 ft ⋅ lb$$En unidades estándar de EE. UU., medimos la magnitud de la fuerza $\|\bold{F}\|$ en libras.
La magnitud del vector de desplazamiento $\|\overrightarrow{PQ}\|$ nos dice qué tan lejos se movió el objeto, y se mide en pies. La unidad de medida habitual para el trabajo, entonces, es la libra-pie. Una libra-pie es la cantidad de trabajo requerida para mover un objeto que pesa 1 libra a una distancia de 1 pie. En el sistema métrico, la unidad de medida de la fuerza es el newton (N), y la unidad de medida de magnitud para el trabajo es un newton-metro $(N ⋅ m)$, o un julio (J).
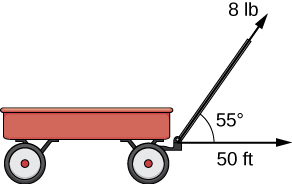
Calculando el trabajo
Una cinta transportadora genera una fuerza $\bold{F} = 5\bold{i} - 3\bold{j} + \bold{k}$ que mueve una maleta desde el punto $(1,1,1)$ al punto $(9,4,7)$ a lo largo de una línea recta. Encuentra el trabajo realizado por la cinta transportadora. La distancia se mide en metros y la fuerza se mide en newtons.
Para los siguientes ejercicios, se dan los vectores $\bold{u}$ y $\bold{v}$. Calcula el producto punto $\bold{u} ⋅ \bold{v}$.
Para los siguientes ejercicios, se dan los vectores $\bold{a}, \bold{b}$ y $\bold{c}$. Determina los vectores $(\bold{a} ⋅ \bold{b})\bold{c}$ y $(\bold{a} ⋅ \bold{c})\bold{b}$. Expresar los vectores en forma de componente.
Para los siguientes ejercicios, se dan los vectores bidimensionales $\bold{a}$ y $\bold{b}$.
Para los siguientes ejercicios, encuentra la medida del ángulo entre los vectores tridimensionales $\bold{a}$ y $\bold{b}$. Expresa la respuesta en radianes redondeados a dos decimales, si no es posible expresarla exactamente.
Para los siguientes ejercicios, determine si los vectores dados son ortogonales.
Para los siguientes ejercicios, determina qué pares (si los hay) de los siguientes vectores son ortogonales.
Para los siguientes problemas, se proporciona el vector $\bold{u}$.
Demuestra que $cos2α + cos2β + cos2γ = 1$.
Para los siguientes ejercicios, se dan los vectores $\bold{u}$ y $\bold{v}$.


La segunda fuerza tiene una magnitud de 40 lb y el punto final de su vector es el punto $Q (0,1,1)$. Sea $\bold{F}$ la fuerza resultante de las fuerzas $\bold{F_1}$ y $\bold{F_2}$.
Imagina a un mecánico girando una llave para apretar un perno. El mecánico aplica una fuerza al final de la llave. Esto crea rotación, o torque, que aprieta el perno. Podemos usar vectores para representar la fuerza aplicada por el mecánico y la distancia (radio) desde el perno hasta el final de la llave. Entonces, podemos representar el par mediante un vector orientado a lo largo del eje de rotación. Ten en cuenta que el vector de torque es ortogonal tanto para el vector de fuerza como para el vector de radio.
En esta sección, desarrollaremos una operación llamada producto cruz, que nos permite encontrar un vector ortogonal a dos vectores dados. Calcular el par es una aplicación importante de los productos cruz, y examinamos el par con más detalle más adelante en la sección.
El producto punto es una multiplicación de dos vectores que da como resultado un escalar. En esta sección, presentamos un producto de dos vectores que genera un tercer vector ortogonal a los dos primeros. Considera cómo podríamos encontrar ese vector. Sean $\bold{u} = ⟨u_1, u_2, u_3⟩$ y $\bold{v} = ⟨v_1, v_2, v_3⟩$ vectores distintos de cero. Queremos encontrar un vector $\bold{w} = ⟨w_1, w_2, w_3⟩$ ortogonal a $\bold{u}$ y $\bold{v}$, es decir, queremos encontrar $\bold{w}$ tal que $\bold{u} ⋅ \bold{w} = 0$ y $\bold{v} ⋅ \bold{w} = 0$. Por lo tanto, $w_1, w_2$ y $w_3$ deben satisfacer
$$u_1w_1+u_2w_2+u_3w_3=0\\ v_1w_1+v_2w_2+v_3w_3=0$$Si multiplicamos la ecuación superior por $v_3$ y la ecuación inferior por $u_3$ y restamos, podemos eliminar la variable $w_3$, que da
$$(u_1v_3 - v_1u_3) w_1 + (u_2v_3 - v_2u_3) w_2 = 0$$Si seleccionamos
$$w_1 = u_2v_3 - u_3v_2\\ w_2 = -(u_1v_3 - u_3v_1)$$obtenemos un posible vector de solución. Sustituir estos valores nuevamente en las ecuaciones originales da
$$w_3 = u_1v_2 - u_2v_1$$Es decir, el vector
$$\bold{w} = ⟨{u}_2 {v}_3 - {u}_3 {v}_2, - ({u}_1{v}_3 - {u}_3{v}_1), {u}_1{v}_2 - {u}_2{v}_1⟩$$es ortogonal a $\bold{u}$ y $\bold{v}$, lo que nos lleva a definir la siguiente operación, llamada producto cruz.
Sean $\bold{u} = ⟨{u}_1, {u}_2, {u}_3⟩$ y $\bold{v} = ⟨{v}_1, {v}_2, {v}_3⟩$. Entonces, el producto cruz $\bold{u} × \bold{v}$ es el vector
$$\begin{aligned} \bold{u} × \bold{v} &= ({u}_2v_3-{u}_3{v}_2)\bold{i}-({u}_1{v}_3-{u}_3{v}_1)\bold{j}+({u}_1{v}_2-{u}_2{v}_1)\bold{k}\\ &= ⟨{u}_2{v}_3 - {u}_3{v}_2, -({u}_1{v}_3 - {u}_3{v}_1), {u}_1{v}_2-{u}_2{v}_1 ⟩\end{aligned} $$ $$\tag{$2.9$}$$Por la forma en que hemos desarrollado $\bold{u} × \bold{v}$, debe quedar claro que el producto cruz es ortogonal tanto para $\bold{u}$ como para $\bold{v}$. Sin embargo, nunca está de más comprobarlo. Para mostrar que $\bold{u} × \bold{v}$ es ortogonal a $\bold{u}$, calculamos el producto escalar de $\bold{u}$ y $\bold{u} × \bold{v}$.
$$\begin{aligned} \bold{u} ⋅ (\bold{u} × \bold{v}) &= ⟨{u}_1, {u}_2, {u}_3⟩ ⋅ ⟨{u}_2{v}_3-{u}_3{v}_2, -{u}_1{v}_3 + {u}_3{v}_1,{u}_1{v}_2-{u}_2{v}_1⟩\\ &= {u}_1({u}_2{v}_3 - {u}_3{v}_2) + {u}_2(-{u}_1{v}_3 + {u}_3{v}_1) + {u}_3({u}_1{v}_2-{u}_2{v}_1)\\ &= {u}_1{u}_2{v}_3 - {u}_1{u}_3{v}_2 - {u}_1{u}_2{v}_3 + {u}_2{u}_3{v}_1 + {u}_1{u}_3{v}_2 - {u}_2{u}_3{v}_1\\ &= ({u}_1{u}_2{v}_3 - {u}_1{u}_2{v}_3) + (-{u}_1{u}_3{v}_2 + {u}_1{u}_3{v}_2) + ({u}_2{u}_3{v}_1 - {u}_2{u}_3{v}_1)\\ &= 0 \end{aligned}$$
De manera similar, podemos mostrar que el producto cruz también es ortogonal a $\bold{v}$.
Encontrar un producto cruz
Sean $\bold{p} = ⟨- 1,2,5⟩$ y $\bold{q} = ⟨4,0, -3⟩$ (). Encuentra $\bold{u} × \bold{v}$.
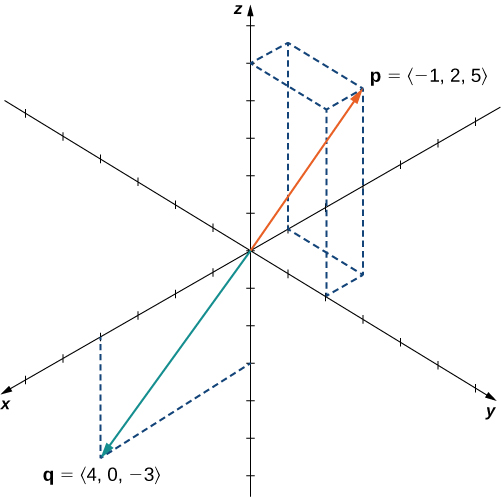
En la siguiente escena interactiva (adaptación de una escena del libro Geometría analítica del espacio), puedes verificar la ortogonalidad de los vectores $\color{Red}\bold{p}$ y $\color{Green}\bold{q}$ con el producto cruz $\color{Blue}\bold{p}×\bold{q}$. Usa la barra de escala para apreciar el vector azul. Puedes modificar los valores de $\bold{p}$ y $\bold{q}$ para hallar otros productos vectoriales.
Prueba que si $\color{Red}\bold{p}$ y $\color{Green}\bold{q}$ sen encuentran en el plano $xy$, entonces $\color{Blue}\bold{p}×\bold{q}$ irá en dirección Z; por ejemplo, $\color{Red}\bold{p} = ⟨3,0,0⟩$ y $\color{Green}\bold{q} = ⟨1,3,0 ⟩$, tendrá como producto cruz $\color{Blue}\bold{p}×\bold{q} = ⟨0,0,9 ⟩$; es decir $\color{Blue}9\bold{k}$
Aunque puede no ser obvio en la Ecuación 2.9, la dirección de $\bold{u}×\bold{v}$ viene dada por la regla de la mano derecha. Si levantamos la mano derecha con los dedos apuntando en la dirección de $\bold{u}$, luego doblamos los dedos hacia el vector $\bold{v}$, el pulgar apunta en la dirección del producto cruz, como se muestra en la .
Después de la figura, observa la escena interactiva (en pantalla ampliada es mejor) en la que se explica la regla de la mano derecha en "Física Estática", para el caso de torques o momentos.

Observa lo que esto significa para la dirección de $\bold{v}×\bold{u}$. Si aplicamos la regla de la mano derecha a $\bold{v}×\bold{u}$, comenzamos con nuestros dedos apuntando en la dirección de $\bold{v}$, luego doblamos nuestros dedos hacia el vector $\bold{u}$. En este caso, el pulgar apunta en la dirección opuesta de $\bold{u}×\bold{v}$. (¡Inténtalo!)
Anticonmutatividad del producto cruz
Sean $\bold{u} = ⟨0,2,1⟩$ y $\bold{v} = ⟨3, -1,0⟩$. Calcula $\bold{u}×\bold{v}$ y $\bold{v}×\bold{u}$ y grafícalos.

Los productos cruz de los vectores unitarios $\bold{i}, \bold{j}$ y $\bold{k}$ pueden ser útiles para simplificar algunos cálculos. Una aplicación directa de la definición muestra que
$$\bold{i}×\bold{i} = \bold{j}×\bold{j} = \bold{k}×\bold{k} = \bold{0}$$El producto cruz de dos vectores es un vector, por lo que cada uno de estos productos da como resultado el vector cero, no el escalar 0. Verifica los cálculos por tu cuenta.
Además, debido a que el producto cruz de dos vectores es ortogonal a cada uno de estos vectores, sabemos que el producto cruz de $\bold{i}$ y $\bold{j}$ es paralelo a $\bold{k}$. Del mismo modo, el producto vectorial de $\bold{i}$ y $\bold{k}$ es paralelo a $\bold{j}$, y el producto vectorial de $\bold{j}$ y $\bold{k}$ es paralelo a $\bold{i}$. Podemos usar la regla de la mano derecha para determinar la dirección de cada producto. Entonces tenemos
| $$\begin{aligned} \bold{i}×\bold{j} &= \bold{k}\\ \bold{j}×\bold{k} &= \bold{i}\\ \bold{k}×\bold{i} &= \bold{j} \end{aligned}$$ | $$\begin{aligned} \bold{j}×\bold{i} &= -\bold{k}\\ \bold{k}×\bold{j} &= -\bold{i}\\ \bold{i}×\bold{k} &= -\bold{j} \end{aligned}$$ |
Producto cruz de vectores unitarios estándar
Encuentra $\bold{i}×(\bold{j}×\bold{k})$
Como hemos visto, el producto punto a menudo se llama producto escalar porque da como resultado un escalar. El producto cruz da como resultado un vector, por lo que a veces se denomina producto vectorial. Estas operaciones son versiones de multiplicación de vectores, pero tienen propiedades y aplicaciones muy diferentes. Exploremos algunas propiedades del producto cruz. Probamos solo algunos de ellos. Las pruebas de las otras propiedades se dejan como ejercicios.
Propiedades del producto cruz
Supongamos que $\bold{u}, \bold{v}$ y $\bold{w}$ son vectores en el espacio, y que c es un escalar.
| $\text{i.}\\\text{ii.}\\\text{iii.}\\\text{iv.}\\\text{v.}\\\text{vi.}$ | $\begin{aligned} \bold{u}×\bold{v} &= -\bold{v}×\bold{u}\; \text{(Anticonmutativa)}\\ \bold{u}×(\bold{v}+\bold{w}) &= \bold{u}×\bold{v} + \bold{u}×\bold{w}\;\text{(Distributiva)}\\ c(\bold{u}×\bold{v}) &= (c\bold{u})×\bold{v} = \bold{u}×(c\bold{v})\\ \bold{u}×\bold{0} &= \bold{0}×\bold{u}\;\text{(Producto cruz del vector cero)}\\ \bold{v}×\bold{v} &= \bold{0}\;\text{Producto de un vector consigo mismo}\\ \bold{u} ⋅ (\bold{v}×\bold{w}) &= (\bold{u}×\bold{v}) ⋅ \bold{w}\;\text{(Triple producto escalar)} \end{aligned}$ |
Prueba
Para la propiedad i., queremos demostrar $\bold{u}×\bold{v} = -(\bold{v}×\bold{u})$. Tenemos
A diferencia de la mayoría de las operaciones que hemos visto, el producto cruz no es conmutativo. Esto tiene sentido si pensamos en la regla de la mano derecha.
La propiedad iv. se deduce directamente de la definición del producto cruz. Tenemos
$$\begin{aligned} \bold{u}×\bold{0} &= ⟨u_2 ⋅ 0-u_3 ⋅ 0,-(u_2 ⋅ 0-u_3 ⋅ 0),u_1 ⋅ 0-u_2 ⋅ 0⟩\\ &= ⟨0,0,0⟩ =\bold{0} \end{aligned}$$Entonces, por propiedad i., $\bold{0}×\bold{u} = \bold{0}$. Recuerda que el producto escalar de un vector y el vector cero es el escalar 0, mientras que el producto cruz de un vector con el vector cero es el vector $\bold{0}$.
Propiedad vi. se parece a la propiedad asociativa, pero ten en cuenta el cambio en las operaciones:
$$\begin{aligned} \bold{u} ⋅ (\bold{v}×\bold{w}) &= \bold{u} ⋅ ⟨v_2w_3-v_3w_2,-v_1w_3+v_3w_1,v_1w_2-v_2w_1⟩\\ &= u_1(v_2w_3-v_3w_2)+u_2(-v_1w_3+v_3w_1)+u_3(v_1w_2-v_2w_1)\\ &= u_1v_2w_3-u_1v_3w_2-u_2v_1w_3+u_2v_3w_1+u_3v_1w_2-u_3v_2w_1\\ &= (u_2v_3-u_3v_2)w_1+(u_3v_1-u_1v_3)w_2+(u_1v_2-u_2v_1)w_3\\ &= ⟨u_2v_3-u_3v_2,u_3v_1-u_1v_3,u_1v_2-u_2v_1⟩ ⋅ ⟨w_1,w_2,w_3⟩\\ &= (\bold{u}×\bold{v}) ⋅ \bold{w} \end{aligned}$$
Uso de las propiedades del producto cruz
Usa las propiedades del producto cruz para calcular $(2\bold{i}× 3\bold{j})× \bold{j}$
Hasta ahora en esta sección, nos hemos preocupado por la dirección del vector $\bold{u}×\bold{v}$, pero no hemos discutido su magnitud. Resulta que hay una expresión simple para la magnitud de $\bold{u}×\bold{v}$ que involucra las magnitudes de $\bold{u}$ y $\bold{v}$, y el seno del ángulo entre ambos vectores.
Magnitud del producto cruz
Sena los vectores $\bold{u}$ y $\bold{v}$, y sea $θ$ el ángulo entre ellos. Entonces, $$\|\bold{u}×\bold{v}\| = \|\bold{u}\| ⋅ \|\bold{v}\|senθ$$
Prueba
Sean $\bold{u} = ⟨u_1, u_2, u_3⟩$ y $\bold{v} = ⟨v_1, v_2, v_3⟩$ los vectores, y $θ$ el ángulo entre ellos.
Luego
Tomando raíces cuadradas y observando que $\sqrt{sen^2θ} = senθ$ para $0\le θ \le 180°$, tenemos el resultado deseado:
$$\|\bold{u}×\bold{v}\| = \|\bold{u}\| ⋅ \|\bold{v}\|senθ$$Esta definición del producto cruz nos permite visualizar o interpretar el producto geométricamente. Está claro, por ejemplo, que el producto cruz se define solo para vectores en tres dimensiones, no para vectores en dos dimensiones. En dos dimensiones, es imposible generar un vector simultáneamente ortogonal a dos vectores no paralelos.
Cálculo del producto cruz
Usa las propiedades del producto cruz para encontrar la magnitud del producto cruz de $\bold{u} = ⟨0,4,0⟩$ y $\bold{v} = ⟨0,0, -3⟩$.
Usar la ecuación 2.9 para encontrar el producto cruz de dos vectores es sencillo y presenta el producto cruz en la forma de componente. La fórmula, sin embargo, es complicada y difícil de recordar. Afortunadamente, tenemos una alternativa. Podemos calcular el producto cruz de dos vectores usando la notación determinante.
Un determinante $2 × 2$ se define por
$$\begin{vmatrix} a_1 & a_2 \\ b_1 & b_2 \end{vmatrix} = a_1b_2-b_1a_2$$Por ejemplo
$$\begin{vmatrix} 3 & -2 \\ 5 & 1 \end{vmatrix} = 3(1)-5(-2)=3+10=13$$Un determinante $3 × 3$ se define en términos de determinantes $2 × 2$ de la siguiente manera:
$$\begin{vmatrix} a_1 & a_2 & a_3\\ b_1 & b_2 & b_3\\c_1 & c_2 & c_3\end{vmatrix} = a_1\begin{vmatrix} b_2 & b_3 \\ c_2 & c_3 \end{vmatrix} - a_2\begin{vmatrix} b_1 & b_3 \\ c_1 & c_3 \end{vmatrix} + a_3\begin{vmatrix} b_1 & b_2 \\ c_1 & c_2 \end{vmatrix}\tag{$2.10$}$$
La ecuación 2.10 se conoce como la expansión del determinante a lo largo de la primera fila. Observa que los multiplicadores de cada uno de los determinantes $2 × 2$ en el lado derecho de esta expresión son las entradas en la primera fila del determinante $3 × 3$. Además, cada uno de los determinantes $2 × 2$ contiene las entradas del determinante $3 × 3$ que quedarían si se tacharan la fila y la columna que contiene el multiplicador. Por lo tanto, para el primer término a la derecha, $a_1$ es el multiplicador, y el determinante $2 × 2$ contiene las entradas que quedan si se tachan la primera fila y la primera columna del determinante $3 × 3$. Del mismo modo, para el segundo término, el multiplicador es $a_2$, y el determinante $2 × 2$ contiene las entradas que quedan si se tachan la primera fila y la segunda columna del determinante $3 × 3$. Observa, sin embargo, que el coeficiente del segundo término es negativo. El tercer término se puede calcular de manera similar.
Uso de la expansión a lo largo de la primera fila para calcular un determinante $3 × 3$
Evaluar el determinante $\begin{vmatrix} 2 & 5 & -1\\ -1 & 1 & 3\\-2 & 3 & 4\end{vmatrix}$
Técnicamente, los determinantes se definen solo en términos de matrices de números reales. Sin embargo, la notación determinante proporciona un dispositivo mnemónico útil para la fórmula del producto cruz.
Regla: Producto cruz calculado por un determinante
Sean $\bold{u} = ⟨u_1, u_2, u_3⟩$ y $\bold{v} = ⟨v_1, v_2, v_3⟩$ vectores. Entonces el producto cruz $\bold{u}×\bold{v}$ viene dado por
$$\bold{u}×\bold{v} = \begin{vmatrix} \color{Blue}\bold{i} & \color{Blue}\bold{j} & \color{Blue}\bold{k}\\ u_1 & u_2 & u_3\\v_1 & v_2 & v_3\end{vmatrix} = \begin{vmatrix} u_2 & u_3 \\ v_2 & v_3 \end{vmatrix}\color{Blue}\bold{i} \color{Black}- \begin{vmatrix} u_1 & u_3 \\ v_1 & v_3 \end{vmatrix}\color{Blue}\bold{j} \color{Black}+ \begin{vmatrix} u_1 & u_2 \\ v_1 & v_2 \end{vmatrix}\color{Blue}\bold{k}$$
Usando la notación determinante para encontrar el producto cruz
Sean $\bold{p} = ⟨-1,2,5⟩$ y $\bold{q} = ⟨4,0, -3⟩$. Encuentra $\bold{p}×\bold{q}$.
El producto cruz es muy útil para varios tipos de cálculos, que incluyen encontrar un vector ortogonal a dos vectores dados, calcular áreas de triángulos y paralelogramos, e incluso determinar el volumen de la forma geométrica tridimensional hecha de paralelogramos conocidos como paralelepípedos.
Los siguientes ejemplos ilustran estos cálculos.
Encontrar un vector unitario ortogonal a dos vectores dados
Dados $\bold{a} = ⟨5,2, -1⟩$ y $\bold{b} = ⟨0, -1,4⟩$. Encuentra un vector unitario ortogonal a los vectores $\bold{a}$ y $\bold{b}$.
Para usar el producto cruz para calcular áreas, establecemos y probamos el siguiente teorema.
Área de un paralelogramo
Si ubicamos los vectores $\bold{u}$ y $\bold{v}$ de manera que formen lados adyacentes de un paralelogramo, entonces el área del paralelogramo viene dada por $\|\bold{u}×\bold{v}\|$ ().
Demostramos que la magnitud del producto cruz es igual a la base por la altura del paralelogramo.
$$\begin{aligned} \text{Área de un paralelogramo} &= \text{base }×\text{ altura}\\ &= \|\bold{u}\|(\|\bold{v}\|senθ)\\ &= \|\bold{u}\|×\|\bold{v}\| \end{aligned}$$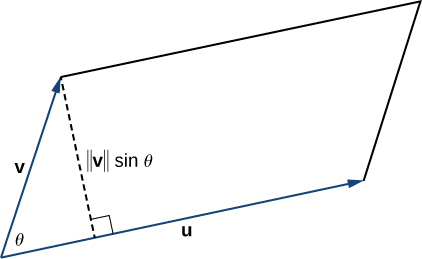
Encontrar el área de un triángulo
Sean $P = (1,0,0), Q = (0,1,0)$ y $R = (0,0,1)$ los vértices de un triángulo (). Encuentra su área
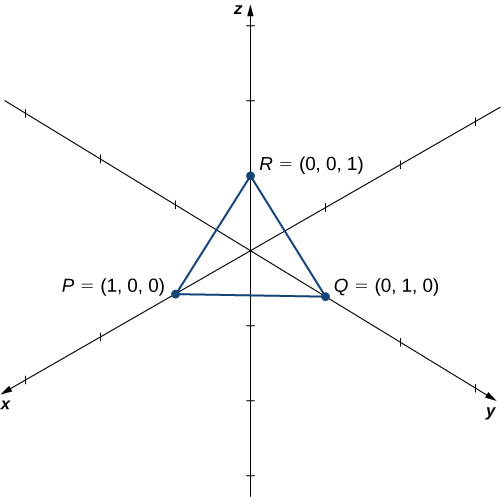
Nuevamente recurrimos al libro Geometría analítica del espacio de María José García Cebrian y Elena E. Álvarez Sáiz, que nos ofrecen la siguiente escena interactiva:
Debido a que el producto cruz de dos vectores es un vector, es posible combinar el producto escalar y el producto cruz. El producto escalar de un vector con el producto cruz de otros dos vectores se llama producto triple escalar o producto mixto porque el resultado es escalar.
El producto triple escalar de los vectores $\bold{u}, \bold{v}$ y $\bold{w}$ es
$$\bold{u} ⋅ (\bold{v}×\bold{w})$$Cálculo del producto triple escalar
El producto triple escalar de los vectores $\bold{u} = u_1\bold{i} + u_2\bold{j} + u_3\bold{k}, \bold{v} = v_1\bold{i} + v_2\bold{j} + v_3\bold{k}$, y $\bold{w} = w_1\bold{i} + w_2\bold{j} + w_3\bold{k}$ es el determinante de la matriz $3 × 3$ formada por los componentes de los vectores:
$$\bold{u} ⋅ (\bold{v}×\bold{w}) = \begin{vmatrix} u_1 & u_2 & u_3\\ v_1 & v_2 & v_3\\w_1 & w_2 & w_3\end{vmatrix}$$
Cálculo del producto triple escalar
Sean $\bold{u} = ⟨1,3,5⟩, \bold{v} = ⟨2, -1,0⟩$ y $\bold{w}= ⟨- 3,0, -1⟩$. Calcula el producto triple escalar $\bold{u} ⋅ (\bold{v}×\bold{w})$
Cuando creamos una matriz a partir de tres vectores, debemos tener cuidado con el orden en que los enumeramos. Si los enumeramos en una matriz en un orden y luego reorganizamos las filas, el valor absoluto del determinante permanece sin cambios. Sin embargo, cada vez que dos filas cambian de lugar, el determinante cambia de signo:
$$\begin{vmatrix} a_1 & a_2 & a_3\\ b_1 & b_2 & b_3\\c_1 & c_2 & c_3\end{vmatrix} = d\;\;\begin{vmatrix} b_1 & b_2 & b_3\\ a_1 & a_2 & a_3\\c_1 & c_2 & c_3\end{vmatrix} = -d$$ $$\begin{vmatrix} b_1 & b_2 & b_3\\ c_1 & c_2 & c_3\\a_1 & a_2 & a_3\end{vmatrix} = d\;\;\begin{vmatrix} c_1 & c_2 & c_3\\ b_1 & b_2 & b_3\\a_1 & a_2 & a_3\end{vmatrix} = -d$$Verificar este hecho es sencillo, pero bastante desordenado. Echemos un vistazo a esto con un ejemplo:
$$\begin{aligned} \begin{vmatrix} 1 & 2 & 1\\ -2 & 0 & 3\\4 & 1 & -1\end{vmatrix} &= \begin{vmatrix} 0 & 3\\ 1 & -1\end{vmatrix} -2\begin{vmatrix} -2 & 3\\ 4 & -1\end{vmatrix} + \begin{vmatrix} -2 & 0\\ 4 & 1\end{vmatrix}\\ &= (0-3)-2(2-12)+(-2-0)\\ &= -3+20-2=15 \end{aligned}$$Cambiando las dos filas superiores tenemos
$$\begin{aligned} \begin{vmatrix} -2 & 0 & 3\\ 1 & 2 & 1\\4 & 1 & -1\end{vmatrix} &= -2\begin{vmatrix} 2 & 1\\ 1 & -1\end{vmatrix} +3\begin{vmatrix} 1 & 2\\ 4 & -1\end{vmatrix} + 3\begin{vmatrix} 1 & 2\\ 4 & 1\end{vmatrix}\\ &= -2(-2-1)+3(1-8)=6-21=-15 \end{aligned}$$Reorganizar los vectores en los productos triples es equivalente a reordenar las filas en la matriz del determinante. Sean $\bold{u} = u_1\bold{i} + u_2\bold{j} + u_3\bold{k}, \bold{v} = v_1\bold{i} + v_2\bold{j} + v_3\bold{k}$, y $\bold{w} = w_1\bold{i} + w_2\bold{j} + w_3\bold{k}$. Aplicando el cálculo de un producto triple escalar, tenemos
$$\bold{u} ⋅ (\bold{v}×\bold{w}) = \begin{vmatrix} u_1 & u_2 & u_3\\ v_1 & v_2 & v_3\\w_1 & w_2 & w_3\end{vmatrix}\;\;\text{ y }\;\\ \bold{u} ⋅ (\bold{w}×\bold{v}) = \begin{vmatrix} u_1 & u_2 & u_3\\ w_1 & w_2 & w_3\\v_1 & v_2 & v_3\end{vmatrix}$$Podemos obtener el determinante para calcular $\bold{u} ⋅ (\bold{w}×\bold{v})$ cambiando las dos filas inferiores de $\bold{u} ⋅ (\bold{v}×\bold{w})$. Por lo tanto, $\bold{u} ⋅ (\bold{v}×\bold{w}) = - \bold{u} ⋅ (\bold{w}×\bold{v})$
Siguiendo este razonamiento y explorando las diferentes formas en que podemos intercambiar variables en el producto triple escalar, se obtienen las siguientes identidades:
$$\bold{u} ⋅ (\bold{v}×\bold{w}) = - \bold{u} ⋅ (\bold{w}×\bold{v})$$ $$\bold{u} ⋅ (\bold{v}×\bold{w}) = \bold{v} ⋅ (\bold{w}×\bold{u}) = \bold{w} ⋅ (\bold{u}×\bold{v})$$Sean $\bold{u}$ y $\bold{v}$ dos vectores en posición estándar. Si $\bold{u}$ y $\bold{v}$ no son múltiplos escalares entre sí, entonces estos vectores forman lados adyacentes de un paralelogramo. Vimos que el área de este paralelogramo es $\|\bold{u}×\bold{v}\|$. Ahora supongamos que agregamos un tercer vector $\bold{w}$ que no se encuentra en el mismo plano que $\bold{u}$ y $\bold{v}$ pero que aún comparte el mismo punto inicial. Luego, estos vectores forman tres bordes de un paralelepípedo, un prisma tridimensional con seis caras que son cada uno paralelogramos, como se muestra en la . El volumen de este prisma es el producto de la altura de la figura y el área de su base. El producto triple escalar de $\bold{u}$, $\bold{v}$ y $\bold{w}$ proporciona un método simple para calcular el volumen del paralelepípedo definido por estos vectores.
Volumen de un paralelepípedo
El volumen de un paralelepípedo con bordes adyacentes dados por los vectores $\bold{u}$, $\bold{v}$ y $\bold{w}$ es el valor absoluto del producto escalar triple:
$$V=|\bold{u} ⋅ (\bold{v}×\bold{w})|$$Observa que, como su nombre lo indica, el producto triple escalar produce un escalar. La fórmula de volumen que se acaba de presentar utiliza el valor absoluto de una cantidad escalar.
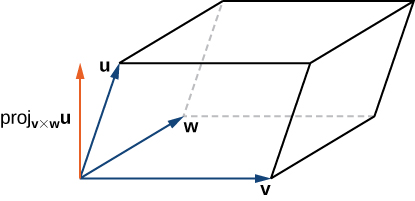
El área de la base del paralelepípedo viene dada por $\|\bold{v}×\bold{w}\|$. La altura de la figura viene dada por $\|proy_{\bold{v}×\bold{w}}\bold{u}\|$. El volumen del paralelepípedo es el producto de la altura y el área de la base, por lo que tenemos
$$\begin{aligned} V &= \|proy_{\bold{v}×\bold{w}}\bold{u}\|\|\bold{v}×\bold{w}\bold{u}\|\\ &= \bigg|\frac{\bold{u} ⋅ (\bold{v}×\bold{w})}{\|\bold{v}×\bold{w}\|}\bigg|\|\bold{v}×\bold{w}\|\\ &= |\bold{u} ⋅ (\bold{v}×\bold{w})| \end{aligned}$$
Cálculo del volumen de un paralelepípedo
Sean $\bold{u} = ⟨- 1, -2,1⟩ , \bold{v} = ⟨4,3,2⟩$ y $\bold{w}= ⟨0, -5, -2⟩$. Encuentra el volumen del paralelepípedo con bordes adyacentes $\bold{u}, \bold{v}$ y $\bold{w}$ ().
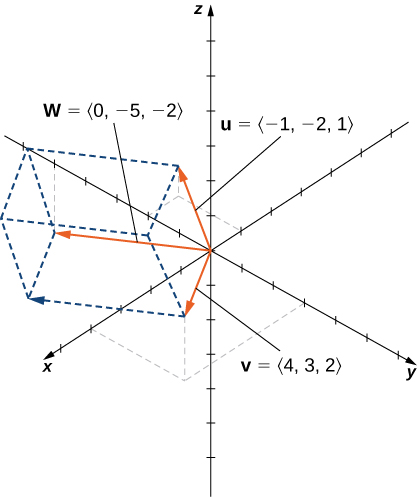
En la página siguiente, puedes interactuar con una escena de GeoGebra, diseñada por Juan Carlos Ponce Campuzano, en la que puedes cambiar los valores del los vectores $\bold{u}, \bold{v}$ y $\bold{w}$ moviendo sus puntos finales en la ventana tridimensional.
Interactúa con la escena en una pantalla ampliada (clic en la esquina superior derecha).
El producto cruz aparece en muchas aplicaciones prácticas en matemáticas, física e ingeniería. Examinemos algunas de estas aplicaciones aquí, incluida la idea del par, con el que comenzamos esta sección.
Uso del producto triple escalar
Usa el producto triple escalar para mostrar que los vectores $\bold{u} = ⟨2,0,5⟩, \bold{v} = ⟨2,2,4⟩$ y $\bold{w} = ⟨1, -1,3⟩$ son coplanares, es decir, muestra que estos vectores se encuentran en el mismo plano
Hallando un vector ortogonal
Solo uno y solo un plano puede pasar a través de cualquier conjunto de tres puntos no colineales. Encuentra un vector ortogonal al plano que contenga los puntos $P = (9, -3, -2), Q = (1,3,0)$ y $R = (- 2,5,0)$.
Hemos visto cómo usar el producto escalar triple y cómo encontrar un vector ortogonal a un plano. Ahora aplicamos el producto cruz a situaciones del mundo real.
Algunas veces una fuerza hace que un objeto gire. Por ejemplo, girar un destornillador o una llave crea este tipo de efecto de rotación, llamado torque.
Torque, $τ$ (la letra griega tau), mide la tendencia de una fuerza a producir rotación alrededor de un eje de rotación. Sea $\bold{r}$ un vector con un punto inicial ubicado en el eje de rotación y con un punto final ubicado en el punto donde se aplica la fuerza, y deja que el vector $\bold{F}$ represente la fuerza. Entonces el par es igual al producto cruz de $\bold{r}$ y $\bold{F}$:
$$τ = \bold{r}×\bold{F}$$
Piensa en usar una llave para apretar un tornillo. El torque $\bold{τ}$ aplicado al perno depende de cuán fuerte empujemos la llave (fuerza) y cuán lejos del mango apliquemos la fuerza (distancia). El par aumenta con una mayor fuerza sobre la llave a una mayor distancia del perno. Las unidades comunes de torque son el newton-metro o pie-libra. Aunque el torque es dimensionalmente equivalente al trabajo (tiene las mismas unidades), los dos conceptos son distintos. El par se usa específicamente en el contexto de rotación, mientras que el trabajo generalmente implica movimiento a lo largo de una recta.
Calculando un torque
Se aprieta un perno aplicando una fuerza de 6 N a una llave de 0,15 m (). El ángulo entre la llave y el vector de fuerza es de 40°. Encuentra la magnitud del par sobre el centro del perno. Redondea la respuesta a dos decimales.
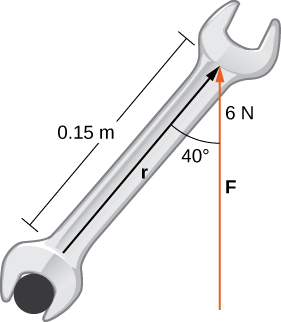
En Física Estática, el torque se suele llamar "momento de una fuerza", tal como se explica a continuación:
Observa otros ejemplos de aplicación de torques o momentos:
Para los siguientes ejercicios, se dan los vectores $\bold{u}$ y $\bold{v}$.
En los siguientes ejercicios, se dan los vectores $\bold{u}$ y $\bold{v}$. Encuentra el vector unitario $\bold{w}$ en la dirección del vector de producto cruz $\bold{u}×\bold{v}$. Expresa su respuesta usando vectores unitarios estándar.
Para los siguientes ejercicios, se dan los vectores $\bold{u}$ y $\bold{v}$. Utiliza la notación determinante para encontrar el vector ortogonal a los vectores $\bold{u}$ y $\bold{v}$.
En los siguientes ejercicios, los vectores $\bold{u}, \bold{v}$ y $\bold{w}$ son dados.
Usa este resultado para calcular $(\bold{i}cosθ + \bold{j}senθ) × (\bold{i}senθ - \bold{j}cosθ)$, donde $θ$ es un número real (Solución).
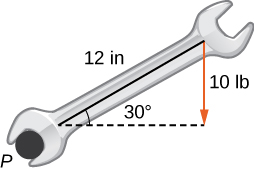
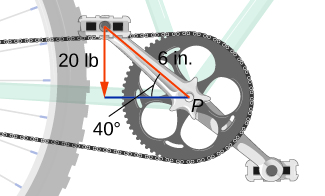
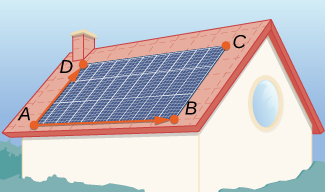
Por ahora, estamos familiarizados con la escritura de ecuaciones que describen una recta en dos dimensiones. Para escribir una ecuación para una recta, debemos conocer dos puntos en la recta, o debemos conocer la dirección de la recta y al menos un punto a través del cual pasa la recta. En dos dimensiones, usamos el concepto de pendiente para describir la orientación o dirección de una recta. En tres dimensiones, describimos la dirección de una recta usando un vector paralelo a la recta. En esta sección, examinamos cómo usar ecuaciones para describir rectas y planos en el espacio.
Primero exploremos lo que significa que dos vectores sean paralelos. Recuerda que los vectores paralelos deben tener la misma dirección o direcciones opuestas. Si dos vectores distintos de cero, $\bold{u}$ y $\bold{v}$, son paralelos, afirmamos que debe haber un escalar, $k$, tal que $\bold{u} = k\bold{v}$. Si $\bold{u}$ y $\bold{v}$ tienen la misma dirección, simplemente elige $k = \frac{\|\bold{u}\|}{\|\bold{v}\|}$. Si $\bold{u}$ y $\bold{v}$ tienen direcciones opuestas, elige $k = -\frac{\|\bold{u}\|}{\|\bold{v}\|}$. Tenga en cuenta que lo contrario se mantiene también. Si $u = kv$ para algún escalar $k$, entonces $\bold{u}$ y $\bold{v}$ tienen la misma dirección $(k \gt 0)$ o direcciones opuestas $(k \lt 0)$, entonces $\bold{u}$ y $\bold{v}$ son paralelas. Por lo tanto, dos vectores distintos de cero $\bold{u}$ y $\bold{v}$ son paralelos si y solo si $\bold{u} = k\bold{v}$ para algún $k$ escalar. Por convención, el vector cero $\bold{0}$ se considera paralelo a todos los vectores.
Como en dos dimensiones, podemos describir una recta en el espacio usando un punto en la recta y la dirección de la recta, o un vector paralelo, que llamamos el vector de dirección (). Sea $L$ una recta en el espacio que pasa por el punto $P (x_0, y_0, z_0)$.
Sea $\bold{v} = ⟨a, b, c⟩$ un vector paralelo a $L$. Luego, para cualquier punto en la recta $Q (x, y, z)$, $\overrightarrow{PQ}$ es paralela a $\bold{v}$. Por lo tanto, como acabamos de discutir, hay un escalar, $t$, tal que $\overrightarrow{PQ} = t\bold{v}$, que da
$$\begin{aligned} \overrightarrow{PQ} &= t\bold{v}\\ ⟨x-x_0,y-y_0,z-z_0⟩ &= t⟨a,b,c⟩\tag{$2.11$}\\ ⟨x-x_0,y-y_0,z-z0_⟩ &= ⟨ta,tb,tc⟩ \end{aligned}$$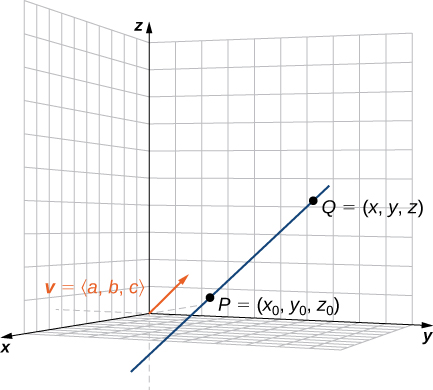
Usando operaciones vectoriales, podemos reescribir la ecuación 2.11 como
$$\begin{aligned} ⟨x-x_0,y-y_0,z-z_0⟩ &= ⟨ta,tb,tc⟩\\ ⟨x,y,z⟩ - ⟨x_0,y_0,z_0⟩ &= t⟨a,b,c⟩\\ ⟨x,y,z⟩ &= ⟨x_0,y_0,z_0⟩ +t⟨a,b,c⟩ \end{aligned}$$Configurando $\bold{r} = ⟨x, y, z⟩$ y $\bold{r}_0 = ⟨x_0, y, z_0⟩$, ahora tenemos la ecuación vectorial de una recta:
$$\bold{r}=\bold{r}_0+tv\tag{$2.12$}$$La ecuación 2.11 muestra que las siguientes ecuaciones son simultáneamente verdaderas: $x - x_0 = ta, y - y_0 = tb$ y $z - z_0 = tc$. Si resolvemos cada una de estas ecuaciones para las variables $x, y$, y $z$, obtenemos un conjunto de ecuaciones en las que cada variable se define en términos del parámetro $t$ y que, juntas, describen la recta. Este conjunto de tres ecuaciones forma un conjunto de ecuaciones paramétricas de una recta:
$$x=x_0+ta\;\;\;\;\;\;y=y_0+tb\;\;\;\;\;\;z=z_0+tc$$Si resolvemos cada una de las ecuaciones para $t$ asumiendo que $a, b$ y $c$ no son cero, obtenemos una descripción diferente de la misma recta:
$$\frac{x-x_0}{a}=t\;\;\;\;\;\;\frac{y-y_0}{b}=t\;\;\;\;\;\;\frac{z-z_0}{c}=t$$Como cada expresión es igual a $t$, todas tienen el mismo valor. Podemos establecerlos iguales entre sí para crear ecuaciones simétricas de una recta:
$$\frac{x-x_0}{a}=\frac{y-y_0}{b}=\frac{z-z_0}{c}$$Resumimos los resultados en el siguiente teorema.
Ecuaciones paramétricas y simétricas de una recta
Las siguientes ecuaciones paramétricas pueden describir una recta $L$ paralela al vector $\bold{v} = ⟨a, b, c⟩$ y que pasa por el punto $P (x_0, y_0, z_0)$:
$$x=x_0+ta,\;\;\;y=y_0+tb,\;\;\text{y}\;z=z_0+tc\tag{$2.13$}$$Si las constantes $a, b$ y $c$ no son todas cero, entonces $L$ puede describirse mediante la ecuación simétrica de la recta:
$$\frac{x-x_0}{a}=\frac{y-y_0}{b}=\frac{z-z_0}{c}\tag{$2.14$}$$Las ecuaciones paramétricas de una recta no son únicas. El uso de un vector paralelo diferente o un punto diferente en la recta conduce a una representación equivalente diferente. Cada conjunto de ecuaciones paramétricas conduce a un conjunto relacionado de ecuaciones simétricas, por lo que se deduce que una ecuación simétrica de una recta tampoco es única.
Ecuaciones de una recta en el espacio
Encuentra las ecuaciones paramétricas y simétricas de la recta que pasa por los puntos $(1,4, -2)$ y $(-3,5,0)$
En la siguiente escena interactiva, puedes observar la recta que pasa por los puntos del ejercicio anterior. Puedes, además, modificar las coordenadas de los puntos y observar cómo el interactivo calcula las ecuaciones de la recta. Te puede servir, también, para verificar los resultados de algunos ejercicios propuestos al final de este apartado.
A veces no queremos la ecuación de una recta completa, solo un segmento de recta. En este caso, limitamos los valores de nuestro parámetro $t$.
Por ejemplo, sea $P (x_0, y_0, z_0)$ y $Q (x_1, y_1, z_1)$ puntos en una recta, y sean $\bold{p} = ⟨x_0, y_0, z_0⟩$ y $\bold{q} = ⟨x_1, y_1, z_1⟩$ los vectores de posición asociados. Además, sea $\bold{r} = ⟨x, y, z⟩$. Queremos encontrar una ecuación vectorial para el segmento de recta entre $P$ y $Q$. Usando $P$ como nuestro punto conocido en la recta, y $\overrightarrow{PQ} = ⟨x_1 - x_0, y_1 - y_0, z_1 - z_0⟩$ como la ecuación del vector direccional, con la ecuación 2.12 obtenemos
$$\bold{r} = \bold{p} + t\big(\overrightarrow{PQ}\big)$$Usando las propiedades de los vectores:
$$\begin{aligned} \bold{r} = \bold{p} + t\big(\overrightarrow{PQ}\big)\\ &= ⟨x_0,y_0,z_0⟩ + t⟨x_1-x_0,y_1-y_0,z_1-z_0⟩\\ &= ⟨x_0,y_0,z_0⟩ + t(⟨x_1,y_1,z_1⟩ - ⟨x_0,y_0,z_0⟩)\\ &= ⟨x_0,y_0,z_0⟩ +t⟨x_1,y_1,z_1⟩ -t⟨x_0,y_0,z_0⟩\\ &= (1-t)⟨x_0,y_0,z_0⟩+t⟨x_1,y_1,z_1⟩\\ &= (1-t)\bold{p}+t\bold{q} \end{aligned}$$Por lo tanto, la ecuación vectorial de la recta que pasa por $P$ y $Q$ es
$$\bold{r} = (1-t)\bold{p}+t\bold{q}$$Recuerda que no queríamos la ecuación de la recta completa, solo el segmento de recta entre $P$ y $Q$. Observa que cuando $t = 0$, tenemos $\bold{r} = \bold{p}$, y cuando $t = 1$, tenemos $\bold{r} = \bold{q}$. Por lo tanto, la ecuación vectorial del segmento de recta entre $P$ y $Q$ es
$$\bold{r}=(1-t)\bold{p}+t\bold{q} \;\;\;,\;\;\; 0\le t \le 1\tag{$2.15$}$$Volviendo a la ecuación 2.12, también podemos encontrar ecuaciones paramétricas para este segmento de recta. Tenemos
$$\begin{aligned} \bold{r} = \bold{p} + t\big(\overrightarrow{PQ}\big)\\ ⟨x,y,z⟩ &= ⟨x_0,y_0,z_0⟩ + t⟨x_1-x_0,y_1-y_0,z_1-z_0⟩\\ &= ⟨x_0+t(x_1-x_0),y_0+t(y_1-y_0),z_0+t(z_1-z_0)⟩ \end{aligned}$$Entonces, las ecuaciones paramétricas son:
$$x=x_0+t(x_1-x_0),\;\;y=y_0+t(y_1-y_0),\\z=z_0+t(z_1-z_0),\;\;\;0 \le t \le 1\tag{$2.16$}$$
Ecuaciones paramétricas de un segmento de recta
Encuentra las ecuaciones paramétricas del segmento de recta entre los puntos $P (2,1,4)$ y $Q (3, -1,3)$
En la siguiente escena interactiva, puedes observar el segmento y, si lo deseas, cambiar los valores de los puntos.
Ya sabemos cómo calcular la distancia entre dos puntos en el espacio. Ahora ampliamos esta definición para describir la distancia entre un punto y una recta en el espacio. Existen varios contextos del mundo real cuando es importante poder calcular estas distancias.
Al construir una casa, por ejemplo, los constructores deben considerar los requisitos de "retroceso", cuando las estructuras o los accesorios deben estar a una cierta distancia de la recta de la propiedad. Los viajes aéreos ofrecen otro ejemplo. Las aerolíneas están preocupadas por las distancias entre las áreas pobladas y las rutas de vuelo propuestas.
Sea $L$ una recta en el plano y $M$ sea cualquier punto que no esté en la recta. Luego, definimos la distancia $d$ de $M$ a $L$ como la longitud del segmento de recta $\overline{MP}$, donde $P$ es un punto en $L$ tal que $\overline{MP}$ es perpendicular a $L$ ().
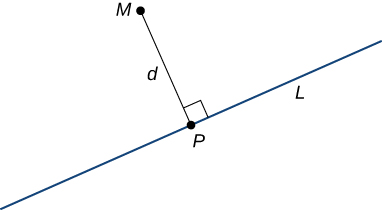
Cuando buscamos la distancia entre una recta y un punto en el espacio, todavía se aplica la . Definimos la distancia como la longitud del segmento de recta perpendicular que conecta el punto con la recta. En el espacio, sin embargo, no hay una manera clara de saber qué punto de la recta crea un segmento de recta tan perpendicular, por lo que seleccionamos un punto arbitrario en la recta y utilizamos las propiedades de los vectores para calcular la distancia.
Por lo tanto, sea $P$ un punto arbitrario en la recta $L$ y sea $\bold{v}$ un vector de dirección para $L$ ().

Los vectores $\overrightarrow{PM}$ y $\bold{v}$ forman dos lados de un paralelogramo con área $\bigg\|\overrightarrow{PM} × \bold{v}\bigg\|$. Usando una fórmula de geometría, el área de este paralelogramo también se puede calcular como el producto de su base y altura:
$$\bigg\|\overrightarrow{PM} × \bold{v}\bigg\| = \|\bold{v}\| ⋅ d$$Podemos usar esta fórmula para encontrar una fórmula general para la distancia entre una recta en el espacio y cualquier punto que no esté en la recta.
Distancia de un punto a una recta
Sea $L$ una recta en el espacio que pase por el punto $P$ con el vector de dirección $\bold{v}$. Si $M$ es cualquier punto que no esté en $L$, entonces la distancia de $M$ a $L$ es
$$d = \frac{\bigg\|\overrightarrow{PM} × \bold{v}\bigg\|}{\|\bold{v}\|}$$
Cálculo de la distancia de un punto a una recta
Encuentra la distancia entre el punto $M = (1,1,3)$ y la recta $\frac{x - 3}{4} = \frac{y + 1}{2} = z - 3$.
Dadas dos rectas en el plano bidimensional, las rectas son iguales, son paralelas pero no iguales, o se cortan en un solo punto. En tres dimensiones, es posible un cuarto caso. Si dos rectas en el espacio no son paralelas, pero no se intersectan, entonces se dice que las rectas son rectas oblicuas ().

Para clasificar las rectas como paralelas pero no iguales, iguales, intersectantes u oblicuas, necesitamos saber dos cosas: si los vectores direccionales son paralelos y si las rectas comparten un punto ().

Clasificación de rectas en el espacio
Para cada par de rectas, determina si las rectas son iguales, paralelas pero no iguales, oblicuas o intersectadas.
Sabemos que una recta está determinada por dos puntos. En otras palabras, para dos puntos distintos, hay exactamente una recta que pasa a través de esos puntos, ya sea en dos dimensiones o en tres. Del mismo modo, dados tres puntos que no todos se encuentran en la misma recta, hay un plano único que pasa por estos puntos. Así como una recta está determinada por dos puntos, un plano está determinado por tres.
Esta puede ser la forma más sencilla de caracterizar un plano, pero también podemos usar otras descripciones. Por ejemplo, dadas dos rectas distintas que se intersectan, hay exactamente un plano que contiene ambas rectas.
Un plano también está determinado por una recta y cualquier punto que no se encuentre en la recta. Estas caracterizaciones surgen naturalmente de la idea de que un plano está determinado por tres puntos. Quizás la caracterización más sorprendente de un plano es en realidad la más útil.
Imagina un par de vectores ortogonales que comparten un punto inicial. Visualiza agarrando uno de los vectores y girándolo. A medida que gira, el otro vector gira y barre un plano. Aquí, describimos ese concepto matemáticamente. Sea $\bold{n} = ⟨a, b, c⟩$ un vector y $P = (x_0, y_0, z_0)$ un punto. Entonces, el conjunto de todos los puntos $Q = (x, y, z)$ tal que $\overrightarrow{PQ}$ es ortogonal a $\bold{n}$ forma un plano (). Decimos que $\bold{n}$ es un vector normal, o perpendicular al plano. Recuerda, el producto escalar de los vectores ortogonales es cero. Este hecho genera la ecuación vectorial de un plano: $\bold{n} ⋅ \overrightarrow{PQ} = 0$. Reescribir esta ecuación proporciona formas adicionales de describir el plano:
$$\begin{aligned} \bold{n} ⋅ \overrightarrow{PQ} &= 0\\ ⟨a,b,c⟩ ⋅ ⟨x-x_0,y-y_0,z-z_0⟩ &= 0\\ a(x-x_0)+b(y-y_0)+c(z-z_0) &= 0 \end{aligned}$$
Dado un punto $P$ y un vector $\bold{n}$, el conjunto de todos los puntos $Q$ que satisfacen la ecuación $\bold{n} ⋅ \overrightarrow{PQ} = 0$ forma un plano. La ecuación
$$\bold{n} ⋅ \overrightarrow{PQ}=0\tag{$2.17$}$$se conoce como la ecuación vectorial de un plano.
La ecuación escalar de un plano que contiene el punto $P = (x_0, y_0, z_0)$ con el vector normal $\bold{n} = ⟨a, b, c⟩$ es
$$a(x-x_0)+b(y-y_0)+c(z-z_0)=0\tag{$2.18$}$$Esta ecuación se puede expresar como $ax + by + cz + d = 0$, donde $d = -ax_0 - by_0 - cz_0$. Esta forma de la ecuación a veces se llama la forma general de la ecuación de un plano.
Como se describió anteriormente en esta sección, los tres puntos que no están todos en la misma recta determinan un plano. Dados tres de estos puntos, podemos encontrar una ecuación para el plano que contiene estos puntos.
Escribir una ecuación de un plano dados tres puntos
Escribe una ecuación para el plano que contiene los puntos $P = (1,1, -2), Q = (0,2,1)$ y $R = (- 1, -1,0)$ en forma estándar y general.
Las ecuaciones escalares de un plano varían según el vector normal y el punto elegido.
Escribir una ecuación para un plano dado un punto y una recta
Encuentra una ecuación del plano que pasa por el punto $(1,4,3)$ y contiene la recta dada por $x = \frac{y - 1}{2} = z + 1$.
Usa los resultados de los dos ejercicios para observar el plano resultante en la siguiente escena interactiva:
Ahora que podemos escribir una ecuación para un plano, podemos usar la ecuación para encontrar la distancia $d$ entre un punto $P$ y el plano. Se define como la distancia más corta posible desde $P$ hasta un punto en el plano.

Así como encontramos la distancia bidimensional entre un punto y una recta calculando la longitud de un segmento de recta perpendicular a la recta, encontramos la distancia tridimensional entre un punto y un plano calculando la longitud de un segmento de recta perpendicular al plano. Sea $R$ el punto en el plano de modo que $\overrightarrow{RP}$ sea ortogonal al plano, y sea $Q$ un punto arbitrario en el plano. Luego, la proyección del vector $\overrightarrow{QP}$ sobre el vector normal describe el vector $\overrightarrow{RP}$, como se muestra en la .
La distancia entre un plano y un punto
Suponga que un plano con el vector normal $\bold{n}$ pasa a través del punto $Q$. La distancia $d$ desde el plano hasta un punto $P$ que no está en el plano viene dada por
$$ d = \bigg\|proy_{\bold{n}}\overrightarrow{QP}\bigg\| = \bigg| comp_{\bold{n}}\overrightarrow{QP}\bigg| = \frac{\big|\overrightarrow{QP} ⋅ \bold{b}\big|}{\|\bold{n}\|}\tag{$2.19$}$$
Distancia entre un punto y un plano
Encuentre la distancia entre el punto $P = (3,1,2)$ y el plano dado por $x - 2y + z = 5$ (observa la primera figura de la página siguiente).
Hemos discutido las diversas relaciones posibles entre dos rectas en dos dimensiones y tres dimensiones. Cuando describimos la relación entre dos planos en el espacio, solo tenemos dos posibilidades: los dos planos distintos son paralelos o se intersecan. Cuando dos planos son paralelos, sus vectores normales son paralelos. Cuando dos planos se intersectan, la intersección es una recta ().
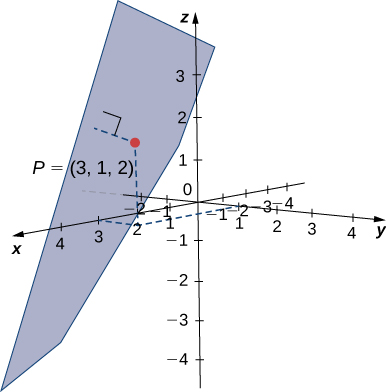

Podemos usar las ecuaciones de los dos planos para encontrar ecuaciones paramétricas para la recta de intersección.
Encontrar la recta de intersección para dos planos
Encuentra ecuaciones paramétricas y simétricas para la recta formada por la intersección de los planos dados por $x + y + z = 0$ y $2x - y + z = 0$ (observa la siguiente figura).
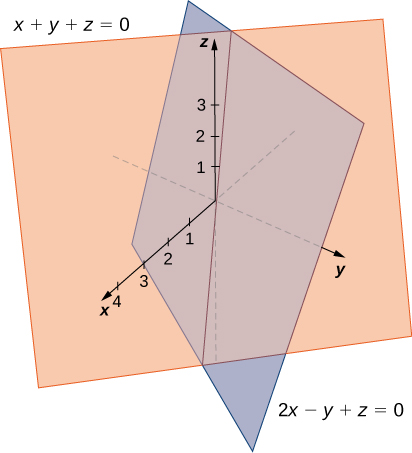
Del libro Geometría analítica del espacio, hemos adaptado la siguiente escena interactiva. Observa que las ecuaciones corresponden al ejercicio anterior. Interactúa con la escena, de tal forma que construyas planos paralelos.
Además de encontrar la ecuación de la recta de intersección entre dos planos, es posible que necesitemos encontrar el ángulo formado por la intersección de dos planos.
Por ejemplo, los constructores que construyen una casa necesitan saber el ángulo donde se encuentran las diferentes secciones del techo para saber si el techo se verá bien y se drenará correctamente. Podemos usar vectores normales para calcular el ángulo entre los dos planos. Podemos hacer esto porque el ángulo entre los vectores normales es el mismo que el ángulo entre los planos. La se muestra por qué esto es cierto.

Podemos encontrar la medida del ángulo $θ$θ entre dos planos de intersección al encontrar primero el coseno del ángulo, usando la siguiente ecuación:
$$cosθ =\frac{|\bold{n}_1 ⋅ \bold{n}_2|}{\|\bold{n}_1\|\|\bold{n}_2\|}$$Entonces podemos usar el ángulo para determinar si dos planos son paralelos u ortogonales o si se intersectan en algún otro ángulo.
Encontrar el ángulo entre dos planos
Determina si cada par de planos es paralelo, ortogonal o ninguno. Si los planos se intersecan, pero no son ortogonales, encuentra la medida del ángulo entre ellos. Da la respuesta en radianes y redondea a dos decimales.
Cuando descubrimos que dos planos son paralelos, es posible que necesitemos encontrar la distancia entre ellos. Para encontrar esta distancia, simplemente seleccionamos un punto en uno de los planos. La distancia desde este punto al otro plano es la distancia entre los planos.
Anteriormente, presentamos la fórmula para calcular esta distancia en la ecuación 2.19:
$$d = \frac{\overrightarrow{QP} ⋅ \bold{n}}{\|\bold{n}\|}$$donde $Q$ es un punto en el plano, $P$ es un punto que no está en el plano y $\bold{n}$ es el vector normal que pasa por el punto $Q$. Considera la distancia desde el punto $(x_0, y_0, z_0)$ al plano $ax + by + cz + k = 0$.
Sea $(x_1, y_1, z_1)$ cualquier punto del plano. Sustituyendo en la fórmula se obtiene
$$\begin{aligned} d &= \frac{|a(x_0-x_1)+b(y_0-y_1)+c(z_0-z_1)|}{\sqrt{a^2+b^2+c^2}}\\ &= \frac{|ax_0+by_0+cz_0+k|}{\sqrt{a^2+b^2+c^2}} \end{aligned}$$Establecemos este resultado formalmente en el siguiente teorema.
Distancia desde un punto a un plano
Sea $P (x_0, y_0, z_0)$ un punto. La distancia de $P$ al plano $ax + by + cz + k = 0$ viene dada por
$$d = \frac{|ax_0+by_0+cz_0+k|}{\sqrt{a^2+b^2+c^2}}$$
Encontrar la distancia entre planos paralelos
Encuentra la distancia entre los dos planos paralelos dada por $2x+y-z=2$ y $2x+y-z=8$.
Distancia entre dos rectas oblicuas
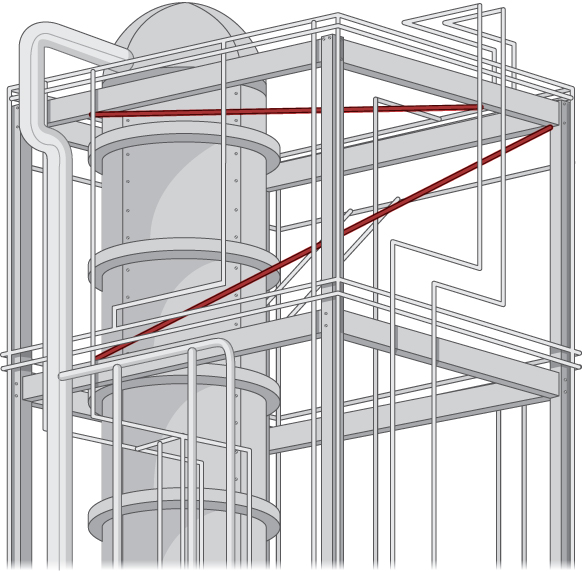
Encontrar la distancia desde un punto a una recta o desde una recta a un plano parece un procedimiento bastante abstracto. Pero, si las rectas representan tuberías en una planta química o tubos en una refinería de petróleo o carreteras en una intersección de autopistas, confirmar que la distancia entre ellas cumple con las especificaciones puede ser importante y difícil de medir.
Una forma es modelar las dos tuberías como rectas, utilizando las técnicas de este capítulo, y luego calcular la distancia entre ellas. El cálculo implica formar vectores a lo largo de las direcciones de las rectas y usar tanto el producto cruz como el producto punto.
Las formas simétricas de dos rectas, $L_1$ y $L_2$, son
$$L_1: \frac{x-x_1}{a_1}= \frac{y-y_1}{b_1} = \frac{z-z_1}{c_1}$$ $$L_2: \frac{x-x_2}{a_2}= \frac{y-y_2}{b_2} = \frac{z-z_2}{c_2}$$Debes desarrollar una fórmula para la distancia $d$ entre estas dos rectas, en términos de los valores $a_1, b_1, c_1; a_2, b_2, c_2; x_1, y_1, z_1$; y $x_2, y_2, z-2$. La distancia entre dos rectas generalmente se toma como la distancia mínima, por lo que esta es la longitud de un segmento de recta o la longitud de un vector que es perpendicular a ambas rectas e intersecta ambas rectas.
Para minimizar el costo, planean instalar estos puntales en los puntos más cercanos entre tuberías inclinadas adyacentes. Debido a que tienen esquemas detallados de la estructura, pueden determinar las longitudes correctas de los puntales necesarios y, por lo tanto, fabricarlos y distribuirlos a los equipos de instalación sin perder un tiempo valioso haciendo mediciones.
La estructura del marco rectangular tiene las dimensiones $4.0 × 15.0 × 10.0$ (altura, ancho y profundidad, medidas en metros). Un sector tiene una tubería que ingresa en la esquina inferior de la unidad de marco estándar y sale en la esquina diametralmente opuesta (la más alejada en la parte superior); llama a esto $L_1$. Un segundo tubo entra y sale en las dos esquinas inferiores opuestas diferentes; llama a esto $L_2$ ().
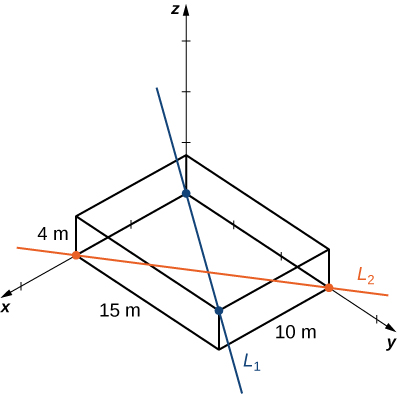
En los siguientes ejercicios, se dan los puntos $P$ y $Q$. Sea $L$ la recta que pasa por los puntos $P$ y $Q$.
Para los siguientes ejercicios, se dan el punto $P$ y el vector $\bold{v}$. Sea $L$ la recta que pasa por el punto $P$ con dirección $\bold{v}$.
Para los siguientes ejercicios, se proporciona la recta $L$.
$x = -1 - t, y = -t, z = 2, t∈ℝ$
Para los siguientes ejercicios, se dan las rectas $L_1$ y $L_2$.
Para los siguientes ejercicios, se dan las rectas $L_1$ y $L_2$. Determina si las rectas son iguales, paralelas pero no iguales, oblicuas o intersectadas.
Para los siguientes ejercicios, se dan el punto $P$ y el vector $\bold{n}$.
Para los siguientes ejercicios, se da la ecuación de un plano.
Para los siguientes ejercicios, se dan los puntos $P, Q$ y $R$.
Para los siguientes ejercicios, se dan las ecuaciones de dos planos.
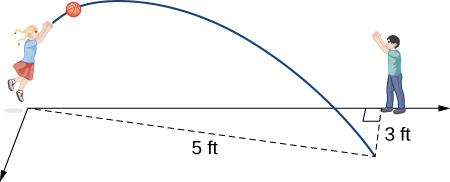
Usa un CAS para representar gráficamente el conjunto de presupuesto y el plano de presupuesto. Para z = 25, encuentra la nueva ecuación de presupuesto y grafica el conjunto de presupuesto en el mismo sistema de coordenadas.
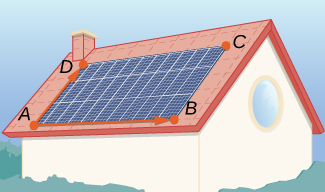
Hemos estado explorando vectores y operaciones de vectores en un espacio tridimensional, y hemos desarrollado ecuaciones para describir rectas, planos y esferas. En esta sección, usaremos nuestro conocimiento de planos y esferas, que son ejemplos de figuras tridimensionales llamadas superficies, para explorar una variedad de otras superficies que se pueden graficar en un sistema de coordenadas tridimensional.
La primera superficie que examinaremos es el cilindro. Aunque la mayoría de la gente piensa inmediatamente en una tubería hueca o una pajita de refresco cuando escuchan la palabra cilindro, aquí usamos el amplio significado matemático del término. Como hemos visto, las superficies cilíndricas no tienen que ser circulares. Un conducto de calentamiento rectangular es un cilindro, al igual que una estera de yoga enrollada, cuya sección transversal tiene forma de espiral.
En el plano de coordenadas bidimensional, la ecuación $x^2 + y^2 = 9$ describe una circunferencia centrada en el origen con radio $3$. En el espacio tridimensional, esta misma ecuación representa una superficie. Imagina copias de una circunferencias apilada una encima de la otra centradas en el eje $z$ (), formando un tubo hueco. Luego podemos construir un cilindro a partir del conjunto de rectas paralelas al eje $z$ que pasan a través de la circunferencia $x^2 + y^2 = 9$ en el plano $xy$, como se muestra en la figura. De esta manera, cualquier curva en uno de los planos de coordenadas puede extenderse para convertirse en una superficie.
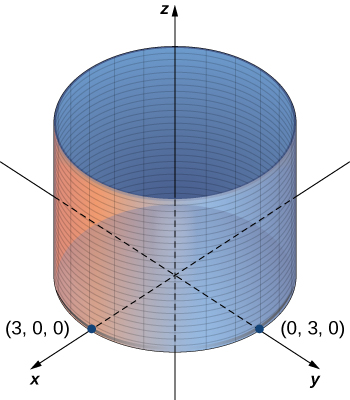
Un conjunto de rectas paralelas a una recta dada que pasa a través de una curva dada se conoce como superficie cilíndrica o cilindro. Las rectas paralelas se llaman resoluciones.
En la siguiente escena interactiva puedes verificar el acercamiento a un cilindro,cuando el número de circunferencias aumenta en el mismo intervalo en el eje $z$.
A partir de la anterior definición, podemos ver que todavía tenemos un cilindro en el espacio tridimensional, incluso si la curva no es una circunferencia. Cualquier curva puede formar un cilindro, y las reglas que componen el cilindro pueden ser paralelas a cualquier recta dada ().
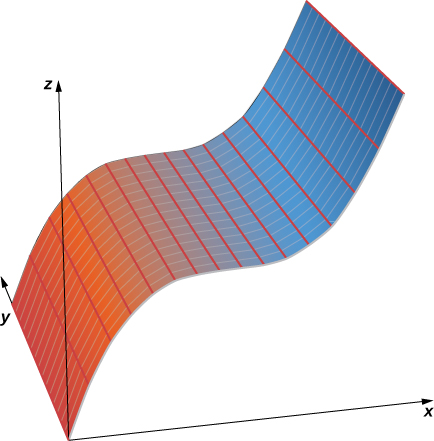
Graficando Superficies Cilíndricas
Dibuja los gráficos de las siguientes superficies cilíndricas.
La superficie correspondiente a $y=senx$, en el ejercicio anterior, la hemos diseñado en DescartesJS:
Las trazas de una superficie son las secciones transversales creadas cuando la superficie se corta con un plano paralelo a uno de los planos de coordenadas.
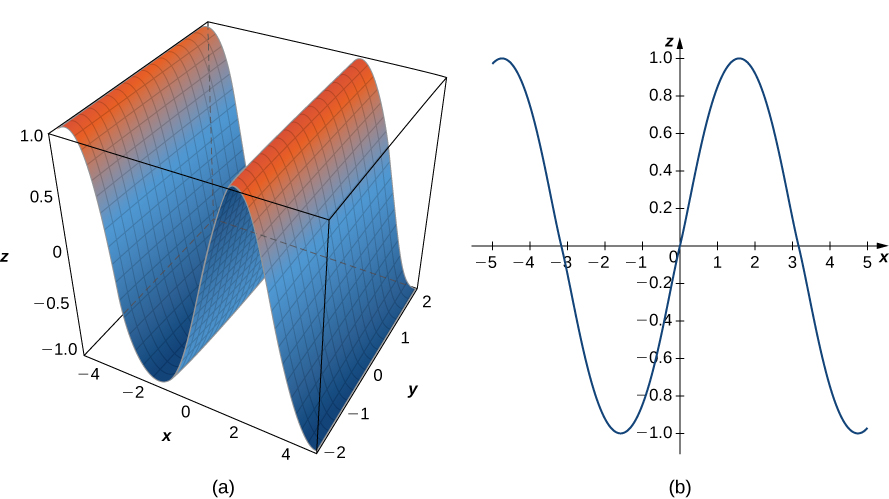
Las trazas son útiles para dibujar superficies cilíndricas. Sin embargo, para un cilindro en tres dimensiones, solo es útil un conjunto de trazas. Observa, en la , que la traza de la gráfica de $z = senx$ en el plano $xz$ es útil para construir la gráfica. Sin embargo, la traza en el plano $xy$ es solo una serie de rectas paralelas, y la traza en el plano $yz$ es simplemente una recta.
Las superficies cilíndricas están formadas por un conjunto de rectas paralelas. Sin embargo, no todas las superficies en tres dimensiones se construyen de manera tan simple. Ahora exploraremos superficies más complejas, y las trazas son una herramienta importante en esta investigación.
Hemos aprendido sobre superficies en tres dimensiones descritas por ecuaciones de primer orden; estas son planos. Algunos otros tipos comunes de superficies se pueden describir mediante ecuaciones de segundo orden. Podemos ver estas superficies como extensiones tridimensionales de las secciones cónicas que discutimos anteriormente: la elipse, la parábola y la hipérbola. Llamamos a estos gráficos superficies cuadráticas.
Las superficies cuadráticas son las gráficas de ecuaciones que se pueden expresar en la forma
$$Ax^2+By^2+Cz^2+Dxy+Exz+Fyz+Gx+Hy+Jz+K=0$$Cuando una superficie cuádrica se corta con un plano de coordenadas, la traza es una sección cónica.
Un elipsoide es una superficie descrita por una ecuación de la forma $\frac{x^2}{a^2} + \frac{y^2}{b^2} + \frac{z^2}{c^2} = 1$. Establece $x = 0$ para ver la traza del elipsoide en el plano $yz$. Para ver las trazas en los planos $xy$ y $xz$, establece $z = 0$ e $y = 0$, respectivamente. Observa que, si $a = b$, la traza en el plano $xy$ es un círculo. De manera similar, si $a = c$, la traza en el plano $xz$ es un círculo y, si $b = c$, entonces la traza en el plano $yz$ es un círculo. Una esfera, entonces, es un elipsoide con $a = b = c$.
Dibujando un elipsoide
Dibuja el elipsoide
$$\frac{x^2}{2^2} + \frac{y^2}{3^2} + \frac{z^2}{5^2} = 1$$
La superficie del anterior ejercicio, la hemos diseñado en DescartesJS:
La traza de un elipsoide es una elipse en cada uno de los planos de coordenadas. Sin embargo, este no tiene que ser el caso para todas las superficies cuádricas. Muchas superficies cuadráticas tienen trazas que son diferentes tipos de secciones cónicas, y esto generalmente se indica con el nombre de la superficie. Por ejemplo, si una superficie puede describirse mediante una ecuación de la forma $\frac{x^2}{a^2} + \frac{y^2}{b^2} = \frac{z}{c}$, entonces llamamos a esa superficie un paraboloide elíptico. La traza en el plano $xy$ es una elipse, pero las trazas en el plano $xz$ y el plano $yz$ son parábolas (). Otros paraboloides elípticos pueden tener otras orientaciones simplemente intercambiando las variables para darnos una variable diferente en el término lineal de la ecuación $\frac{x^2}{a^2} + \frac{z^2}{c^2} = \frac{y}{b}$ o $\frac{y^2}{b^2} + \frac{z^2}{c^2} = \frac{x}{a}$.
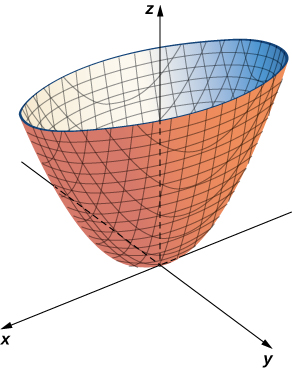
Identificación de trazas de superficies cuadráticas
Describir las trazas del paraboloide elíptico
$$x^2 + \frac{y^2}{2^2} = \frac{z}{5}$$
Observa las trazas en el siguiente paraboloide elíptico:
Los hiperboloides de una hoja tienen algunas propiedades fascinantes. Por ejemplo, se pueden construir utilizando líneas rectas, como en la escultura de la (a). De hecho, las torres de enfriamiento para centrales nucleares a menudo se construyen en forma de hiperboloide. Los constructores pueden usar vigas de acero rectas en la construcción, lo que hace que las torres sean muy fuertes mientras usan relativamente poco material ( (b)).
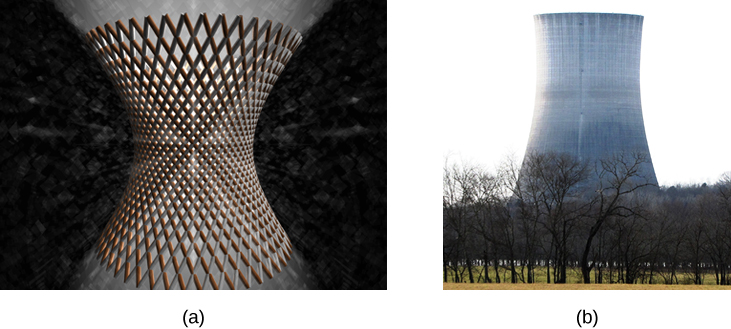
Encontrar el foco de un reflector parabólico
La energía que golpea la superficie de un reflector parabólico se concentra en el punto focal del reflector (). Si la superficie de un reflector parabólico se describe mediante la ecuación $\frac{x^2}{100} + \frac{y^2}{100} = \frac{z}{4}$, ¿dónde está el punto focal del reflector?

Diecisiete superficies cuadráticas estándar pueden derivarse de la ecuación general
$$Ax^2+By^2+Cz^2+Dxy+Exz+Fyz+Gx+Hy+Jz+K=0$$Las siguientes figuras resumen las más importantes.
Haz clic sobre cada imagen para que abras la escena con la superficie correspondiente. Las últimas cinco escenas interactivas, fueron tomadas del libro Curvas y superficies paramétricas, de Navarro y Rivera (2018), las cuales, además de la rotación con clic sostenido, permiten modificar los parámetros de las superficies, para un mejor análisis de sus propiedades.
| Elipsoide $$\frac{x^2}{a^2} + \frac{y^2}{b^2} + \frac{z^2}{c^2} = 1$$ Trazas En el plano $z=p$: una elipse En el plano $y=q$: una elipse En el plano $x=r$: una elipse Si $a=b=c$, entonces la superficie es una esfera. |
 |
| Hiperboloide de una hoja $$\frac{x^2}{a^2} + \frac{y^2}{b^2} - \frac{z^2}{c^2} = 1$$ Trazas En el plano $z=p$: una elipse En el plano $y=q$: una hipérbola En el plano $x=r$: una hipérbola En la ecuación, dos de las variables tienen coeficientes positivos y una tiene coeficiente negativo. El eje de la superficie corresponde a la variable con coeficiente negativo. |
 |
| Hiperboloide de dos hojas $$\frac{x^2}{a^2} - \frac{y^2}{b^2} - \frac{z^2}{c^2} = 1$$ Trazas En el plano $z=p$: una elipse o conjunto vacío En el plano $y=q$: una hipérbola En el plano $x=r$: una hipérbola En la ecuación, dos de las variables tienen coeficientes negativos y una tiene coeficiente positivo. El eje de la superficie corresponde a la variable con coeficiente positivo. La superficie on intersecta el plano de coordenadas perpendicular al eje. |
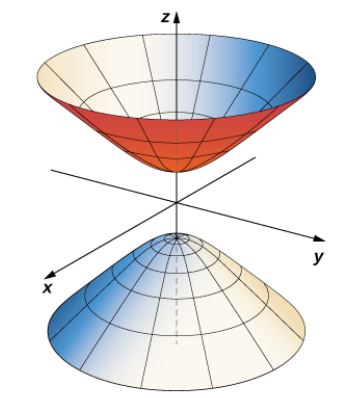 |
| Cono elíptico $$\frac{x^2}{a^2} + \frac{y^2}{b^2} - \frac{z^2}{c^2} = 1$$ Trazas En el plano $z=p$: una elipse En el plano $y=q$: una hipérbola En el plano $x=r$: una hipérbola El eje de la superficie corresponde a la variable con coeficiente negativo. |
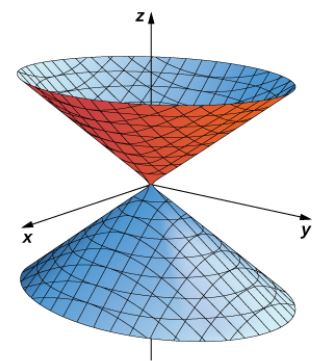 |
| Paraboloide elíptico $$z = \frac{x^2}{a^2} + \frac{y^2}{b^2}$$ Trazas En el plano $z=p$: una elipse En el plano $y=q$: una parábola En el plano $x=r$: una parábola El eje de la superficie corresponde a la variable lineal. |
 |
| Paraboloide hiperbólico $$z = \frac{x^2}{a^2} - \frac{y^2}{b^2}$$ Trazas En el plano $z=p$: una hipérbola En el plano $y=q$: una hipérbola En el plano $x=r$: una hipérbola El eje de la superficie corresponde a la variable con coeficiente negativo. |
 |
Identificación de ecuaciones de superficies cuadráticas
Identifica las superficies representadas por las ecuaciones dadas.
Para los siguientes ejercicios, dibuja y describe la superficie cilíndrica de la ecuación dada.
Para los siguientes ejercicios, se proporciona la gráfica de una superficie cuadrática.
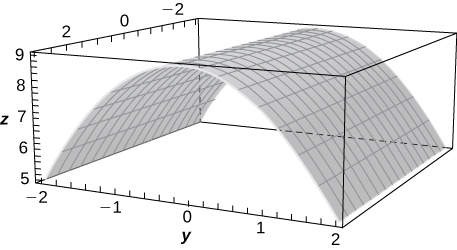

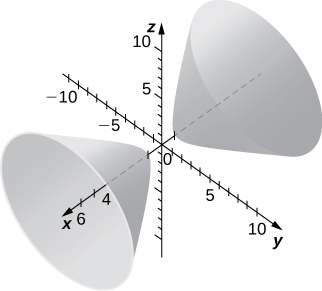

Para los siguientes ejercicios, combina la superficie cuadrática dada con su ecuación correspondiente en forma estándar.
Para los siguientes ejercicios, reescribe la ecuación dada de la superficie cuadrática en forma estándar. Identifica la superficie.
Para los siguientes ejercicios, encuentra la traza de la superficie cuadrática dada en el plano de coordenadas especificado y haz un esbozo.
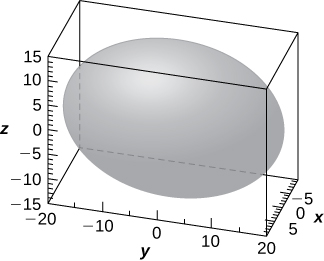
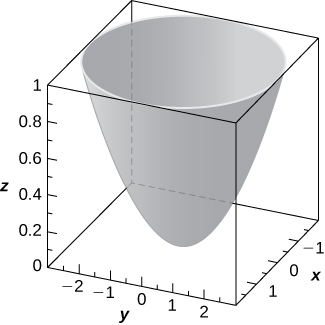
Para los siguientes ejercicios, se da la ecuación de una superficie cuadrática.

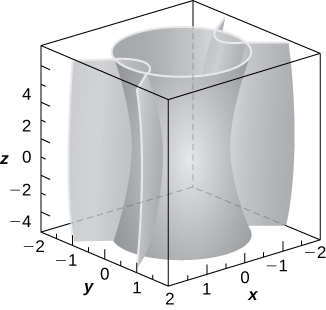

En la siguiente página presentamos dos escenas interactivas que corresponden a las soluciones de los ejercicios 355 y 361. En la primera se presenta la "curva de Viviani", variante de la "curva Clelia". La segunda escena es una superficie curiosa que muestra una forma similar a un "corazón". Estas escenas son tomadas del libro Curvas y superficies paramétricas de Navarro y Rivera (2018).
El sistema de coordenadas cartesianas proporciona una forma sencilla de describir la ubicación de los puntos en el espacio. Sin embargo, algunas superficies pueden ser difíciles de modelar con ecuaciones basadas en el sistema cartesiano. Este es un problema familiar; recuerda que en dos dimensiones, las coordenadas polares a menudo proporcionan un sistema alternativo útil para describir la ubicación de un punto en el plano, particularmente en casos que involucran circunferencias. En esta sección, veremos dos formas diferentes de describir la ubicación de los puntos en el espacio, ambas basadas en extensiones de coordenadas polares. Como su nombre lo indica, las coordenadas cilíndricas son útiles para tratar problemas que involucran cilindros, como calcular el volumen de un tanque de agua redondo o la cantidad de aceite que fluye a través de una tubería. Del mismo modo, las coordenadas esféricas son útiles para tratar problemas relacionados con esferas, como encontrar el volumen de estructuras abovedadas.
Cuando expandimos el sistema tradicional de coordenadas cartesianas de dos dimensiones a tres, simplemente agregamos un nuevo eje para modelar la tercera dimensión. Comenzando con coordenadas polares, podemos seguir este mismo proceso para crear un nuevo sistema de coordenadas tridimensional, llamado sistema de coordenadas cilíndricas. De esta manera, las coordenadas cilíndricas proporcionan una extensión natural de las coordenadas polares a tres dimensiones.
En el sistema de coordenadas cilíndricas, un punto en el espacio (Escena interactiva y ) está representado por el triple ordenado$ (r, θ, z)$, donde

En el plano $xy$, el triángulo rectángulo que se muestra en la proporciona la clave para la transformación entre coordenadas cilíndricas y cartesianas, o rectangulares.
Conversión entre coordenadas cilíndricas y cartesianas
Las coordenadas rectangulares $(x, y, z)$ y las coordenadas cilíndricas $(r, θ, z)$ de un punto están relacionadas de la siguiente manera:
| $$\begin{aligned} x &= rcosθ\\ y &= rsenθ\\ z &= z \end{aligned}$$ | Estas ecuaciones se utilizan para convertir de coordenadas cilíndricas a coordenadas rectangulares. |
| $$\begin{aligned} r^2 &= x^2 + y^2\\ tanθ &= \frac{y}{x}\\ z &= z \end{aligned}$$ | Estas ecuaciones se utilizan para convertir coordenadas rectangulares a coordenadas cilíndricas. |
Como cuando discutimos la conversión de coordenadas rectangulares a coordenadas polares en dos dimensiones, debe notarse que la ecuación $tanθ = \frac{y}{x}$ tiene un número infinito de soluciones. Sin embargo, si restringimos $θ$ a valores entre $0$ y $2π$, entonces podemos encontrar una solución única basada en el cuadrante del plano $xy$ en el que se encuentra el punto original $(x, y, z)$.
Ten en cuenta que si $x = 0$, entonces el valor de $θ$ es $\frac{π}{2}, \frac{3π}{2}$ o $0$, dependiendo del valor de $y$. Observa que estas ecuaciones se derivan de las propiedades de los triángulos rectángulos.
Para que sea fácil de ver, considera el punto $P$ en el plano $xy$ con coordenadas rectangulares $(x, y, 0)$ y con coordenadas cilíndricas $(r, θ, 0)$, como se muestra en la siguiente figura.

Consideremos las diferencias entre las coordenadas rectangulares y cilíndricas al observar las superficies generadas cuando cada una de las coordenadas se mantiene constante. Si $c$ es una constante, entonces en coordenadas rectangulares, las superficies de la forma $x = c, y = c$, o $z = c$ son todos planos. Los planos de estas formas son paralelos al plano $yz$, al plano $xz$ y al plano $xy$, respectivamente. Cuando convertimos a coordenadas cilíndricas, la coordenada $z$ no cambia. Por lo tanto, en coordenadas cilíndricas, las superficies de la forma $z = c$ son planos paralelos al plano $xy$.
Ahora, pensemos en las superficies de la forma $r = c$. Los puntos en estas superficies están a una distancia fija del eje $z$. En otras palabras, estas superficies son cilindros circulares verticales. Por último, ¿qué pasa con $θ = c$? Los puntos en una superficie de la forma $θ = c$ están en un ángulo fijo desde el eje $x$, lo que nos da un semiplano que comienza en el eje $z$ ( y ).


Conversión de coordenadas cilíndricas a rectangulares
Traza el punto con coordenadas cilíndricas $(4,\frac{2π}{3}, -2)$ y expresa su ubicación en coordenadas rectangulares.
Si este proceso parece familiar, es con buena razón. Este es exactamente el mismo proceso que seguimos en el primer capítulo sobre ecuaciones paramétricas y coordenadas polares, para convertir de coordenadas polares a coordenadas rectangulares bidimensionales.
Conversión de coordenadas rectangulares a cilíndricas
Convierte las coordenadas rectangulares $(1, -3,5)$ en coordenadas cilíndricas.
El uso de coordenadas cilíndricas es común en campos como la física. Los físicos que estudian las cargas eléctricas y los condensadores utilizados para almacenar estas cargas han descubierto que estos sistemas a veces tienen una simetría cilíndrica.
Estos sistemas tienen ecuaciones de modelado complicadas en el sistema de coordenadas cartesianas, lo que dificulta su descripción y análisis. Las ecuaciones a menudo se pueden expresar en términos más simples usando coordenadas cilíndricas. Por ejemplo, el cilindro descrito por la ecuación $x^2 + y^2 = 25$ en el sistema cartesiano puede representarse mediante la ecuación cilíndrica $r = 5$.
Identificación de superficies en el sistema de coordenadas cilíndricas
Describe las superficies con las ecuaciones cilíndricas dadas.
Practica con la siguiente escena interactiva, adaptación realizada a partir de la miscelánea "Coordenadas cilíndricas", diseñada por Elena E. Álvarez Sáiz, y publicada en el portal del Proyecto Descartes.
En el menú "elige", selecciona una de las variables; por ejemplo, para $r$ constante obtendrás el cilindro $r=c$.
En el sistema de coordenadas cartesianas, la ubicación de un punto en el espacio se describe utilizando un triple ordenado en el que cada coordenada representa una distancia. En el sistema de coordenadas cilíndricas, la ubicación de un punto en el espacio se describe usando dos distancias ($r$ y $z$) y una medida de ángulo ($θ$). En el sistema de coordenadas esféricas, nuevamente usamos un triple ordenado para describir la ubicación de un punto en el espacio. En este caso, el triple describe una distancia y dos ángulos. Las coordenadas esféricas facilitan la descripción de una esfera, al igual que las coordenadas cilíndricas facilitan la descripción de un cilindro. Las líneas de cuadrícula para coordenadas esféricas se basan en medidas de ángulo, como las de coordenadas polares.
En el sistema de coordenadas esféricas, un punto P en el espacio (Escena interactiva y ) está representado por el triple ordenado $(ρ, θ, ϕ)$ donde
La anterior escena interactiva, es una adaptación realizada a partir de la miscelánea "Coordenadas esféricas", diseñada por Elena E. Álvarez Sáiz, y publicada en el portal del Proyecto Descartes.
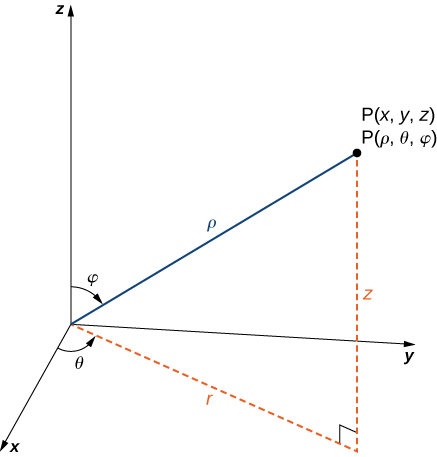
Por convención, el origen se representa como $(0,0,0)$ en coordenadas esféricas.
A continuación, presentamos un Teorema que indica cómo realizar la conversión entre coordenadas esféricas, cilíndricas y rectangulares, la fórmulas presentadas pueden parecer complejas, pero son aplicaciones sencillas de trigonometría.
Conversión entre coordenadas esféricas, cilíndricas y rectangulares
Las coordenadas rectangulares $(x, y, z)$ y las coordenadas esféricas $(ρ, θ, ϕ)$ de un punto se relacionan de la siguiente manera:
| $$\begin{aligned} x &= ρ senϕ cosθ\\ y &= ρ senϕ senθ\\ z &= ρ cosϕ \end{aligned}$$ | Estas ecuaciones se utilizan para convertir coordenadas esféricas en coordenadas rectangulares. |
| $$\begin{aligned} ρ^2 &= x^2 + y^2 +z^2\\ tanθ &= \frac{y}{x}\\ ϕ &= arccos \bigg(\frac{z}{\sqrt{x^2+y^2+z^2}}\bigg) \end{aligned}$$ | Estas ecuaciones se utilizan para convertir coordenadas rectangulares en coordenadas esféricas. |
| $$\begin{aligned} r &= ρ senθ\\ θ &= θ\\ z &= ρ cosθ \end{aligned}$$ | Estas ecuaciones se utilizan para convertir de coordenadas esféricas a coordenadas cilíndricas. |
| $$\begin{aligned} ρ &= \sqrt{r^2 +z^2}\\ θ &= θ\\ ϕ &= arccos \bigg(\frac{z}{\sqrt{r^2+z^2}}\bigg) \end{aligned}$$ | Estas ecuaciones se utilizan para convertir coordenadas cilíndricas en coordenadas esféricas. |
Mirando la , es fácil ver que $r = ρ senϕ$. Luego, mirando el triángulo en el plano $xy$ con $r$ como su hipotenusa, tenemos $x = rcosθ = ρ senϕ cosθ$. La derivación de la fórmula para $y$ es similar. La también muestra que $ρ^2 = r^2 + z^2 = x^2 + y^2 + z^2$ y $z = ρ cosϕ$. Resolver esta última ecuación para $ϕ$ y luego el sustituir $ρ = \sqrt{r^2 +z^2}$ (de la primera ecuación) se produce $ϕ = arccos \bigg(\frac{z}{\sqrt{r^2+z^2}}\bigg)$. Además, ten en cuenta que, como antes, debemos tener cuidado al usar la fórmula $tanθ = \frac{y}{x}$ para elegir el valor correcto de $θ$.

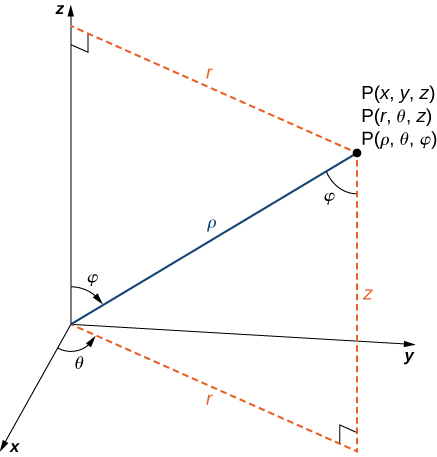
Como hicimos con las coordenadas cilíndricas, consideremos las superficies que se generan cuando cada una de las coordenadas se mantiene constante. Deja que c sea una constante y considera las superficies de la forma $ρ = c$. Los puntos en estas superficies están a una distancia fija del origen y forman una esfera. La coordenada $θ$ en el sistema de coordenadas esféricas es la misma que en el sistema de coordenadas cilíndricas, por lo que las superficies de la forma $θ = c$ son semiplanos, como antes. Por último, considera las superficies de la forma $ϕ = c$. Los puntos en estas superficies están en un ángulo fijo desde el eje $z$ y forman un medio cono (Escena interactiva y ).

Conversión de coordenadas esféricas
Traza el punto con coordenadas esféricas $(8, \frac{π}{3}, \frac{π}{6})$ y expresa su ubicación en coordenadas rectangulares y cilíndricas.
Conversión de coordenadas rectangulares
Convierte las coordenadas rectangulares $(-1,1,\sqrt{6})$ en coordenadas esféricas y cilíndricas.
Identificación de superficies en el sistema de coordenadas esféricas
Describe las superficies con las ecuaciones esféricas dadas.
Las coordenadas esféricas son útiles para analizar sistemas que tienen cierto grado de simetría sobre un punto, como el volumen del espacio dentro de un estadio abovedado o la velocidad del viento en la atmósfera de un planeta. Una esfera que tiene la ecuación cartesiana $x^2 + y^2 + z^2 = c^2$ tiene la ecuación simple $ρ = c$ en coordenadas esféricas.
En geografía, la latitud y la longitud se utilizan para describir ubicaciones en la superficie de la Tierra, como se muestra en la . Aunque la forma de la Tierra no es una esfera perfecta, utilizamos coordenadas esféricas para comunicar la ubicación de los puntos en la Tierra. Supongamos que la Tierra tiene la forma de una esfera con un radio de $4000\; mi$. Expresamos las medidas de los ángulos en grados en lugar de radianes porque la latitud y la longitud se miden en grados.
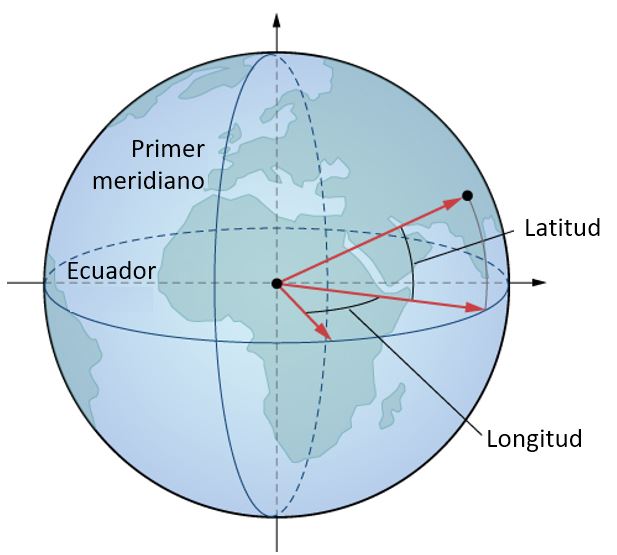
Supón que el centro de la Tierra sea el centro de la esfera, con el rayo desde el centro a través del Polo Norte que representa el eje $z$ positivo. El meridiano principal representa la traza de la superficie a medida que se interseca con el plano $xz$. El ecuador es la traza de la esfera que se interseca con el plano $xy$.
Analiza los triángulos en la esfera terrestre en la siguiente escena interactiva, diseñada por Jose Galo, en la cual seguro te preguntarás ¿Cómo es que la suma de los ángulos de un triángulo es superior a 180º? (consulta la unidad Geometría esférica).
Conversión de latitud y longitud a coordenadas esféricas
La latitud de Columbus, Ohio, es de 40° N y la longitud es de 83° W, lo que significa que Columbus está a 40° al norte del ecuador.
Imagina un rayo desde el centro de la Tierra a través de Columbus y un rayo desde el centro de la Tierra a través del ecuador directamente al sur de Columbus. La medida del ángulo formado por los rayos es de 40°. Del mismo modo, midiendo desde el primer meridiano, Columbus se encuentra a 83° hacia el oeste. Expresa la ubicación de Columbus en coordenadas esféricas.
Las coordenadas cilíndricas y esféricas nos dan la flexibilidad de seleccionar un sistema de coordenadas apropiado para el problema en cuestión. Una elección cuidadosa del sistema de coordenadas puede hacer que un problema sea mucho más fácil de resolver, mientras que una mala elección puede conducir a cálculos innecesariamente complejos. En el siguiente ejercicio, examinamos varios problemas diferentes y discutimos cómo seleccionar el mejor sistema de coordenadas para cada uno.
Elegir el mejor sistema de coordenadas
En cada una de las siguientes situaciones, determinamos qué sistema de coordenadas es el más apropiado y describimos cómo orientaríamos los ejes de coordenadas. Podría haber más de una respuesta correcta sobre cómo deberían orientarse los ejes, pero seleccionamos una orientación que tenga sentido en el contexto del problema. Nota: No hay suficiente información para configurar o resolver estos problemas; simplemente seleccionamos el sistema de coordenadas ().
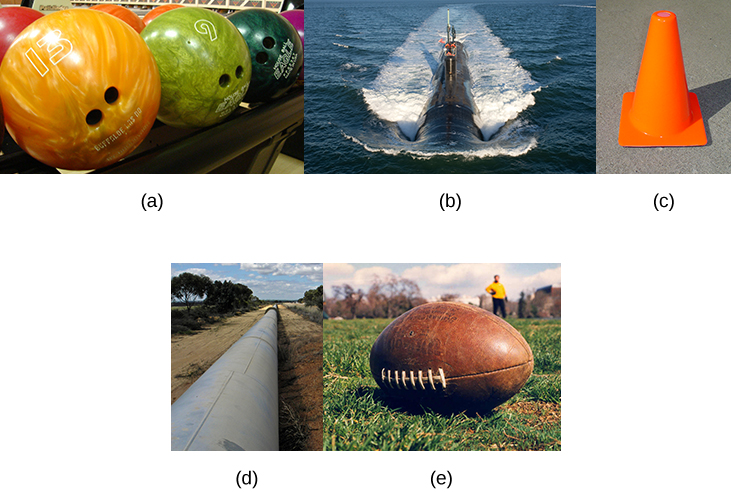
Usa la siguiente figura como ayuda para identificar la relación entre los sistemas de coordenadas rectangulares, cilíndricos y esféricos.

Para los siguientes ejercicios, se dan las coordenadas cilíndricas $(r, θ, z)$ de un punto. Encuentra las coordenadas rectangulares $(x, y, z)$ del punto.
Para los siguientes ejercicios, se dan las coordenadas rectangulares $(x, y, z)$ de un punto. Encuentra las coordenadas cilíndricas $(r, θ, z)$ del punto.
Para los siguientes ejercicios, se da la ecuación de una superficie en coordenadas cilíndricas. Encuentra la ecuación de la superficie en coordenadas rectangulares. Identificar y graficar la superficie.
Para los siguientes ejercicios, se da la ecuación de una superficie en coordenadas rectangulares. Encuentra la ecuación de la superficie en coordenadas cilíndricas.
Se dan las coordenadas esféricas $(ρ, θ, ϕ)$ de un punto. Encuentra las coordenadas rectangulares $(x, y, z)$ del punto.
Se dan las coordenadas rectangulares $(x, y, z)$ de un punto. Encuentra las coordenadas esféricas $(ρ, θ, ϕ)$ del punto. Expresa la medida de los ángulos en grados redondeados al entero más cercano.
Para los siguientes ejercicios, se da la ecuación de una superficie en coordenadas esféricas. Encuentra la ecuación de la superficie en coordenadas rectangulares. Identificar y graficar la superficie.
Para los siguientes ejercicios, se da la ecuación de una superficie en coordenadas rectangulares. Encuentra la ecuación de la superficie en coordenadas esféricas. Identifica la superficie.
Para los siguientes ejercicios, se dan las coordenadas cilíndricas de un punto. Encuentra sus coordenadas esféricas asociadas, con la medida del ángulo $ϕ$ en radianes redondeado a cuatro decimales.
Para los siguientes ejercicios, se dan las coordenadas esféricas de un punto. Encuentra sus coordenadas cilíndricas asociadas.
Para los siguientes ejercicios, encuentra el sistema de coordenadas más adecuado para describir los sólidos.


En 1705, utilizando las nuevas leyes de movimiento de Sir Isaac Newton, el astrónomo Edmond Halley hizo una predicción. Dijo que los cometas que habían aparecido en 1531, 1607 y 1682 eran en realidad el mismo cometa y que reaparecería en 1758. Halley demostró estar en lo cierto, aunque no vivió para verlo. Sin embargo, el cometa fue nombrado más tarde en su honor.
El cometa Halley sigue un camino elíptico a través del sistema solar, con el Sol apareciendo en un foco de la elipse. Este movimiento es predicho por la primera ley de movimiento planetario de Johannes Kepler, que mencionamos brevemente en la Introducción a las ecuaciones paramétricas y las coordenadas polares.
Las funciones con valor vectorial proporcionan un método útil para estudiar varias curvas tanto en el plano como en el espacio tridimensional.
Podemos aplicar este concepto para calcular la velocidad, la aceleración, la longitud del arco y la curvatura de la trayectoria de un objeto. En este capítulo, examinamos estos métodos y mostramos cómo se usan.
Nuestro estudio de las funciones de valor vectorial combina ideas de nuestro examen anterior del cálculo de una sola variable con nuestra descripción de vectores en tres dimensiones del capítulo anterior. En esta sección ampliamos conceptos de capítulos anteriores y también examinamos nuevas ideas sobre curvas en el espacio tridimensional. Estas definiciones y teoremas apoyan la presentación de material en el resto de este capítulo y también en los capítulos restantes del texto.
Nuestro primer paso para estudiar el cálculo de las funciones con valor vectorial es definir qué es exactamente una función con valor vectorial. Luego, podemos ver gráficos de funciones con valor vectorial y ver cómo definen curvas en dos y tres dimensiones.
Una función con valor vectorial es una función de la forma
$$\bold{r}(t) = f(t) \bold{i} + g(t)\bold{j}\;\text{o}\; \bold{r}(t) = f(t) \bold{i} + g(t) \bold{j} + h(t)\bold{k} \tag{$3.1$}$$donde las funciones componentes $f, g$ y $h$ son funciones de valor real del parámetro $t$. Las funciones con valor vectorial también se escriben en la forma
$$\bold{r}(t) = ⟨f(t), g(t)⟩\;\text{ o } \bold{r}(t) = ⟨f(t), g(t), h(t)⟩.\tag{$3.2$}$$En ambos casos, la primera forma de la función define una función bidimensional con valor vectorial; la segunda forma describe una función tridimensional de valor vectorial.
El parámetro $t$ puede estar entre dos números reales: $a\le t\le b$. Otra posibilidad es que el valor de $t$ pueda tomar todos los reales. Por último, las funciones de los componentes pueden tener restricciones de dominio que imponen restricciones sobre el valor de $t$.
Evaluación de funciones con valor vectorial y determinación de dominios
Para cada una de las siguientes funciones con valor vectorial, evalúa $\bold{r}(0), \bold{r}(\frac{π}{2})$ y $\bold{r}(\frac{2π}{3})$. ¿Alguna de estas funciones tiene restricciones de dominio?
El ejercicio ilustra un concepto importante. El dominio de una función con valor vectorial se compone de números reales. El dominio puede ser todos los números reales o un subconjunto de los números reales. El rango se compone de vectores. Cada número real en el dominio de una función con valor vectorial se asigna a un vector bidimensional o tridimensional.
Recuerda que un vector plano consta de dos cantidades: dirección y magnitud. Dado cualquier punto en el plano (el punto inicial), si nos movemos en una dirección específica para una distancia específica, llegamos a un segundo punto. Esto representa el punto terminal del vector. Calculamos los componentes del vector restando las coordenadas del punto inicial de las coordenadas del punto terminal.
Se considera que un vector está en posición estándar si el punto inicial se encuentra en el origen. Al graficar una función con valor vectorial, generalmente graficamos los vectores en el dominio de la función en posición estándar, porque hacerlo garantiza la unicidad del gráfico. Esta convención se aplica también a los gráficos de funciones tridimensionales con valor vectorial. La gráfica de una función con valor vectorial de la forma $\bold{r}(t) = f(t)\bold{i} + g(t)\bold{j}$ consiste en el conjunto de todos $(t, \bold{r}(t))$, y la ruta que traza se llama curva plana.
La gráfica de una función de valor vectorial de la forma $\bold{r}(t) = f(t)\bold{i} + g(t)\bold{j} + h(t) \bold{k}$ consiste en el conjunto de todos $(t, \bold{r}(t))$, y el camino que traza se llama curva espacial. Cualquier representación de una curva plana o una curva espacial usando una función de valor vectorial se llama parametrización vectorial de la curva.
Graficar una función con valor vectorial
Crea un gráfico de cada una de las siguientes funciones con valor vectorial:
Puedes notar que las gráficas en las partes a. y b. son idénticas. Esto sucede porque la función que describe la curva b es una llamada reparametrización de la función que describe la curva a. De hecho, cualquier curva tiene un número infinito de reparametrizaciones; por ejemplo, podemos reemplazar $t$ con $2t$ en cualquiera de las tres curvas anteriores sin cambiar la forma de la curva.
El intervalo sobre el cual se define $t$ puede cambiar, pero eso es todo. Volvemos a esta idea más adelante en este capítulo cuando estudiamos la parametrización de longitud de arco.
Como se mencionó, el nombre de la forma de la curva de la gráfica en el ejemplo 3.2c. es una hélice (). La curva se asemeja a un resorte, con una sección transversal circular que mira hacia abajo a lo largo del eje $z$. Es posible que una hélice sea también elíptica en sección transversal. Por ejemplo, la función de valor vectorial $\bold{r}(t) = 4cost\;\bold{i} + 3sent\;\bold{j} + t\;\bold{k}$ describe una hélice elíptica. La proyección de esta hélice en el plano $xy$ es una elipse. Por último, las flechas en el gráfico de esta hélice indican la orientación de la curva a medida que $t$ progresa de $0$ a $4π$.
En este punto, puedes notar una similitud entre las funciones de valor vectorial y las curvas parametrizadas. De hecho, dada una función de valor vectorial $\bold{r}(t) = f(t)\;\bold{i} + g(t)\;\bold{j}$, podemos definir $x = f(t)$ e $y = g(t)$. Si existe una restricción en los valores de $t$ (por ejemplo, $t$ está restringido al intervalo $[a, b]$ para algunas constantes $a \lt b$), entonces esta restricción se aplica al parámetro. El gráfico de la función parametrizada estaría de acuerdo con el gráfico de la función con valor vectorial, excepto que el gráfico con valor vectorial representaría vectores en lugar de puntos. Como podemos parametrizar una curva definida por una función $y = f(x)$, también es posible representar una curva plana arbitraria mediante una función de valor vectorial.
En la siguiente escena interactiva, diseñada por Brenda Casandra Vargas Rocha (Instituto de Ciencia e Ingeniería de Materiales, UNAM), puedes observar y cambiar las ecuaciones paramétricas de una hélice. Te recomendamos explorar la escena en forma ampliada.
Cambia el valor de $b$ a $2$ y observa cómo se transforma en una hélice elíptica. Puedes, también, cambiar el intervalo, por ejemplo, escribe $2pi$ en la casilla para $t_2$. Notarás que la curva puede quedar segmentada, pues el editor DescartesJS construye las curvas con $N$ segmentos, por ello, se ha dejado un control $N$ para que aumentes este número de intervalos y mejorar el aspecto de la curva.
Ahora echamos un vistazo al límite de una función con valor vectorial. Es importante entender esto para estudiar el cálculo de las funciones con valores vectoriales.
Una función con valor vectorial $\bold{r}$ se acerca al límite $\bold{L}$ a medida que $t$ se acerca a $a$, escribimos
$$\lim\limits_{t \to a} \bold{r}(t) = \bold{L},$$siempre que
$$\lim\limits_{t \to a}\|\bold{r}(t)-\bold{L}\| = 0$$Esta es una definición rigurosa del límite de una función con valor vectorial. En la práctica, utilizamos el siguiente teorema:
Límite de una función con valor vectorial
Sean $f, g$ y $h$ funciones de $t$. Entonces, el límite de la función con valor vectorial $\bold{r}(t) = f(t)\bold{i} + g(t)\bold{j}$ cuando $t$ se acerca a $a$ viene dado por
siempre que existan los límites $\lim\limits_{t \to a}f(t)$ y $\lim\limits_{t \to a}g(t)$. De manera similar, el límite de la función con valor vectorial $\bold{r}(t) = f(t)\bold{i}+ g(t)\bold{j} + h(t)\bold{k}$ cuando $t$ se acerca a $a$ viene dado por
$$\lim\limits_{t \to a} \bold{r}(t) = \bigg[\lim\limits_{t \to a}f(t)\bigg]\bold{i} + \bigg[\lim\limits_{t \to a}g(t)\bigg]\bold{j}+ \bigg[\lim\limits_{t \to a}h(t)\bigg]\bold{k}\tag{$3.4$}$$siempre que existan los límites $\lim\limits_{t \to a}f(t), \lim\limits_{t \to a}g(t)$ y $\lim\limits_{t \to a}h(t)$.
En el siguiente ejercicio, mostramos cómo calcular el límite de una función con valor vectorial.
Evaluación del límite de una función con valor vectorial
Para cada una de las siguientes funciones vectoriales, calcula $\lim\limits_{t \to 3}\bold{r}(t)$ para
Ahora que sabemos cómo calcular el límite de una función con valor vectorial, podemos definir la continuidad en un punto para dicha función.
Sean $f, g$ y $h$ funciones de $t$. Entonces, la función de valor vectorial $\bold{r}(t) = f(t)\bold{i} + g(t)\bold{j}$ es continua en el punto $t = a$ si se cumplen las siguientes tres condiciones:
De manera similar, la función de valor vectorial $\bold{r}(t) = f(t)\bold{i} + g(t)\bold{j} + h(t)\bold{k}$ es continua en el punto $t = a$ si se cumplen las siguientes tres condiciones:
Encuentra el límite de las siguientes funciones con valores vectoriales en el valor indicado de $t$.
Encuentra el dominio de las funciones con valores vectoriales.
Toma $\bold{r}(t) = ⟨cost, t, sent⟩$ y úsalo para responder las siguientes preguntas.
Elimina el parámetro $t$, escribe la ecuación en coordenadas cartesianas, luego dibuja las gráficas de las funciones con valores vectoriales.
Usa una utilidad gráfica para dibujar cada una de las siguientes funciones con valores vectoriales:
Considera la curva descrita por la función de valor vectorial $\bold{r}(t) = (50e^{-t}cost)\bold{i} + (50e^{-t}sent)\bold{j} + (5-5e^{-t})\bold{k}$.
En la página siguiente, puedes observar las gráficas tridimensionales correspondientes a las funciones con valores vectoriales de los ejercicios 29 y 37. Recuerda que puedes ampliarlas haciendo clic en la esquina superior derecha.
En esta escena, hemos dejado los controles $N$ y $c$, sólo para que verifiques que se trata de una variante de la curva tipo "hélice", obteniendo una curva similar a la curva "Ocho", también llamada lemniscata de Gerono o lemniscata de Huygens, o curva en forma de ocho.
Para estudiar el cálculo de funciones con valores vectoriales, seguimos un camino similar al que tomamos al estudiar funciones con valores reales. Primero, definimos la derivada, luego examinamos las aplicaciones de la derivada, luego pasamos a definir integrales. Sin embargo, encontraremos algunas ideas nuevas e interesantes a lo largo del camino como resultado de la naturaleza vectorial de estas funciones y las propiedades de las curvas espaciales.
Ahora que hemos visto qué es una función con valor vectorial y cómo tomar su límite, el siguiente paso es aprender a diferenciarla. La definición de la derivada de una función con valor vectorial es casi idéntica a la definición de una función de valor real de una variable. Sin embargo, debido a que el rango de una función con valor vectorial consiste en vectores, lo mismo es cierto para el rango de la derivada de una función con valor vectorial.
La derivada de una función con valor vectorial $\bold{r}(t)$ es
$$\bold{r'}(t) = \lim\limits_{Δ t \to 0}\frac{\bold{r}(t+Δ t)-\bold{r}(t)}{Δ t},\tag{$3.5$}$$siempre que exista el límite. Si $\bold{r'}(t)$ existe, entonces $\bold{r}$ es diferenciable en $t$. Si $\bold{r'}(t)$ existe para todas las $t$ en un intervalo abierto $(a, b)$, entonces $\bold{r}$ es diferenciable en el intervalo $(a, b)$. Para que la función sea diferenciable en el intervalo cerrado $[a, b]$, también deben existir los dos límites siguientes:
$$\bold{r'}(a) = \lim\limits_{Δ t \to 0^{+}}\frac{\bold{r}(a+Δ t)-\bold{r}(a)}{Δ t}\;\text{ y }\; \bold{r'}(b) = \lim\limits_{Δ t \to 0^{-}}\frac{\bold{r}(b+Δ t)-\bold{r}(b)}{Δ t}$$Muchas de las reglas para calcular derivadas de funciones con valor real se pueden aplicar también al cálculo de derivadas de funciones con valor vectorial. Recuerda que la derivada de una función de valor real puede interpretarse como la pendiente de una recta tangente o la tasa de cambio instantánea de la función.
La derivada de una función con valor vectorial también puede entenderse como una tasa de cambio instantánea; por ejemplo, cuando la función representa la posición de un objeto en un punto dado en el tiempo, la derivada representa su velocidad en ese mismo punto en el tiempo.
Ahora lo demostraremos tomando la derivada de una función con valor vectorial.
Encontrar la derivada de una función con valor vectorial
Usa la definición para calcular la derivada de la función
$$\bold{r}(t)=(3t+4)\bold{i}+(t^2-4t+3)\bold{j}.$$
Observa que en los cálculos del ejercicio anterior, también podríamos obtener la respuesta calculando primero la derivada de cada componente de la función, luego volviendo a colocar estas derivadas en la función con valor vectorial. Esto siempre es cierto para calcular la derivada de una función con valor vectorial, ya sea en dos o tres dimensiones. Establecemos esto en el siguiente teorema. La prueba de este teorema se deriva directamente de las definiciones del límite de una función con valor vectorial y la derivada de una función con valor vectorial.
Diferenciación de funciones con valor vectorial
Sean $f, g$ y $h$ funciones diferenciables de $t$.
Cálculo de la derivada de funciones con valor vectorial
Utiliza la diferenciación de funciones con valores vectoriales para calcular la derivada de cada una de las siguientes funciones.
Antes de continuar, te invitamos a interactuar con la siguiente escena interactiva, diseñada por Yin Bon Ku en GeoGebra.
Aproxima $Δ t$ a $0$ y observa como $\frac{\bold{r}(t+Δ t)-\bold{r}(t)}{Δ t}$ se aproxima a la tangente a la curva en el punto dado.
Interactúa en la escena con los dos deslizadores $t$ y $Δ t$, rota la gráfica para que verifiques la fórmula 3.5, a medida que $Δ t$ se aproxima a $0$. Recuerda que puedes ampliar la escena.
Podemos extender a las funciones de valor vectorial las propiedades de la derivada de variable real. En particular, las reglas de suma y diferencia, la regla del producto y la regla de la cadena se extienden a las funciones de valor vectorial. Sin embargo, en el caso de la regla del producto, en realidad hay tres extensiones: (1) para una función de valor real multiplicada por una función de valor vectorial, (2) para el producto punto de dos funciones de valor vectorial, y (3) para el producto cruz de dos funciones vectoriales.
Propiedades de la derivada de funciones con valor vectorial
Supongamos que $\bold{r}$ y $\bold{u}$ son funciones de valores vectoriales diferenciables de $t$, que $f$ sea una función de valores reales diferenciable de $t$, y que $c$ sea un escalar.
| i. | $$\frac{d}{dt}[c\bold{r}(t)] = c\bold{r'}(t)$$ | Multiplicación por escalar |
| ii. | $$\frac{d}{dt}[\bold{r}(t) \pm \bold{u}(t)] = \bold{r'}(t) \pm \bold{r'}(u)$$ | Suma y diferencia |
| iii. | $$\frac{d}{dt}[f(t)\bold{u}(t)] = f'(t)\bold{u}(t) + f(t)\bold{u'}(t)$$ | Producto escalar |
| iv. | $$\frac{d}{dt}[\bold{r}(t) ⋅ \bold{u}(t)] = \bold{u}(t) ⋅ \bold{r'}(t) + \bold{r}(t) ⋅ \bold{u'}(t)$$ | Producto punto |
| v. | $$\frac{d}{dt}[\bold{r}(t)×\bold{u}(t)] = \bold{u}(t)×\bold{r'}(t) + \bold{r}(t)×\bold{u'}(t)$$ | Producto cruz |
| vi. | $$\frac{d}{dt}[\bold{r}(t)(f(t))] = \bold{r'}(f(t)) ⋅ f'(t)$$ | Regla de la cadena |
| vii. | Si $\bold{r}(t) ⋅ \bold{r}(t)=c$, entonces $\bold{r}(t) ⋅ \bold{r'}(t)=0$ |
Las pruebas de las dos primeras propiedades se derivan directamente de la definición de la derivada de una función con valor vectorial. La tercera propiedad se puede derivar de las dos primeras propiedades, junto con la regla del producto.
Sea $\bold{u(t)} = g(t)\bold{i} + h(t)\bold{j}$. Luego
Para probar la propiedad iv. sea $\bold{r}(t) = f_1(t)\bold{i} + g_1(t)\bold{j}$ y $\bold{u}(t) = f_2(t)\bold{i} + g_2(t)\bold{j}$. Luego
$$\begin{aligned} \frac{d}{dt}[\bold{r}(t) ⋅ \bold{u}(t)] &= \frac{d}{dt}[f_1(t)f_2(t)+g_1(t)g_2(t)]\\ &= f_1'(t)f_2(t)+f_1(t)f_2'(t)+g_1'(t)g_2(t)+g_1(t)g_2'(t)\\ &= f_1'(t)f_2(t)+g_1'(t)g_2(t)+f_1(t)f_2'(t)+g_1(t)g_2'(t)\\ &= f_1'\bold{i}+g_1'\bold{j}) ⋅ (f_2\bold{i}+g_2\bold{j})+(f_1\bold{i}+g_1\bold{j}) ⋅ (f_2'\bold{i}+g_2'\bold{j})\\ &= \bold{u}(t) ⋅ \bold{r'}(t) + \bold{r}(t) ⋅ \bold{u'}(t) \end{aligned}$$La prueba de propiedad v es similar a la de propiedad iv. La propiedad vi puede probarse usando la regla de la cadena. Por último, la propiedad vii se desprende de la propiedad iv:
Ahora, veamos un ejercicio usando estas propiedades.
Uso de las propiedades de derivadas de funciones con valores vectoriales
Dadas las funciones con valores vectoriales
$$\bold{r}(t)=(6t+8)\bold{i}+(4t^2+2t-3)\bold{j}+5t\bold{k}$$y
$$\bold{u}(t)=(t^2-3)\bold{i}+(2t+4)\bold{j}+(t^3-3t)\bold{k},$$calcula cada una de las siguientes derivadas utilizando las propiedades de la derivada de funciones con valores vectoriales.
Recuerda que la derivada en un punto puede interpretarse como la pendiente de la recta tangente a la gráfica en ese punto. En el caso de una función de valor vectorial, la derivada proporciona un vector tangente a la curva representada por la función. Considera la función de valor vectorial $\bold{r}(t) = cost\bold{i} + sent\bold{j}$. La derivada de esta función es $\bold{r'}(t) = - sent\bold{i} + cost\bold{j}$. Si sustituimos el valor $t = \frac{π}{6}$ en ambas funciones obtenemos
$$\bold{r}(\frac{π}{6}) = \frac{\sqrt{3}}{2}\bold{i} + \frac{1}{2}\bold{j}\;\text{ y }\; \bold{r'}(\frac{π}{6}) = -\frac{1}{2}\bold{i} +\frac{\sqrt{3}}{2}\bold{j}$$El gráfico de esta función aparece en la , junto con los vectores $\bold{r} (\frac{π}{6})$ y $\bold{r'}(\frac{π}{6})$.
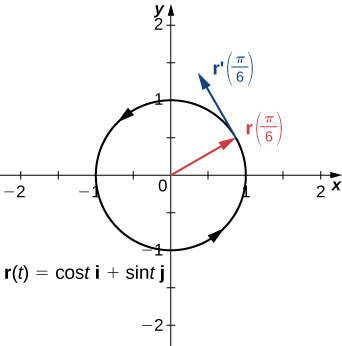
Observa que el vector $\bold{r'}(\frac{π}{6})$ es tangente a la circunferencia en el punto correspondiente a $t = \frac{π}{6}$. Este es un ejemplo de un vector tangente a la curva plana definida por $\bold{r}(t) = cost\bold{i} + sent\bold{j}$.
Para otros valores de $t$ interactúa con la siguiente escena:
Encontrar un vector tangente unitario
Encuentra el vector tangente unitario para cada una de las siguientes funciones con valores vectoriales:
Ya habrás estudiado las antiderivadas o primitivas de funciones de valor real en cursos previos. Cada uno de estos conceptos se puede extender a funciones con valores vectoriales. Además, así como podemos calcular la derivada de una función con valor vectorial diferenciando las funciones componentes por separado, podemos calcular la antiderivada de la misma manera. Además, el teorema fundamental del cálculo se aplica también a las funciones de valor vectorial.
La antiderivada de una función de valor vectorial aparece en las aplicaciones. Por ejemplo, si una función de valor vectorial representa la velocidad de un objeto en el tiempo $t$, entonces su antiderivada representa la posición. O, si la función representa la aceleración del objeto en un momento dado, entonces la antiderivada representa su velocidad.
Sean $f, g$ y $h$ funciones integrables de valor real durante el intervalo cerrado $[a, b]$.
1. La integral indefinida de una función con valor vectorial $\bold{r}(t) = f(t)\bold{i} + g(t)\bold{j}$ es
$$\int [f(t)\bold{i}+g(t)\bold{j}]dt = \bigg[\int f(t)dt\bigg]\bold{i} + \bigg[\int g(t)dt\bigg]\bold{j}\tag{$3.7$}$$La integral definida de una función con valor vectorial es
$$\int_a^b [f(t)\bold{i}+g(t)\bold{j}]dt = \bigg[\int_a^b f(t)dt\bigg]\bold{i} + \bigg[\int_a^b g(t)dt\bigg]\bold{j}\tag{$3.8$}$$2. La integral indefinida de una función de valor vectorial $\bold{r}(t) = f(t)\bold{i} + g(t) \bold{j} + h(t)\bold{k}$ es
$$\int [f(t)\bold{i}+g(t)\bold{j} + h(t)\bold{k}]dt = \bigg[\int f(t)dt\bigg]\bold{i} + \bigg[\int g(t)dt\bigg]\bold{j} \\+ \bigg[\int h(t)dt\bigg]\bold{k}\tag{$3.9$}$$La integral indefinida de una función de valor vectorial es
$$\int_a^b [f(t)\bold{i}+g(t)\bold{j} + h(t)\bold{k}]dt = \bigg[\int_a^b f(t)dt\bigg]\bold{i} + \bigg[\int_a^b g(t)dt\bigg]\bold{j} \\+ \bigg[\int_a^b h(t)dt\bigg]\bold{k}\tag{$3.10$}$$Dado que la integral indefinida de una función de valor vectorial implica integrales indefinidas de las funciones componentes, cada una de estas integrales componentes contiene una constante de integración. Todos pueden ser diferentes. Por ejemplo, en el caso bidimensional, podemos tener
donde $F$ y $G$ son antiderivadas de $f$ y $g$, respectivamente. Luego
$$\begin{aligned} \int [f(t)\bold{i}+g(t)\bold{j}]dt &= \bigg[\int f(t)dt\bigg]\bold{i}+ \bigg[\int g(t)dt\bigg]\bold{j}\\ &= (F(t)+C_1)\bold{i}+(G(t)+C_2)\bold{j}\\ &= F(t)\bold{i}+G(t)\bold{j}+C_1\bold{i}+C_2\bold{j}\\ &= F(t)\bold{i}+G(t)\bold{j}+C \end{aligned}$$donde $C = C_1\bold{i} + C_2\bold{j}$. Por lo tanto, la constante de integración se convierte en un vector constante.
Integrando funciones con valores vectoriales
Calcula cada una de las siguientes integrales:
Calcula las derivadas de las funciones con valores vectoriales.
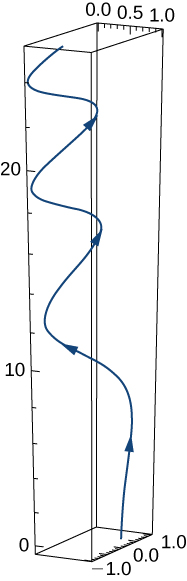
Para los siguientes problemas, encuentra un vector tangente en el valor indicado de $t$.
Encuentra el vector tangente unitario para las siguientes curvas parametrizadas.
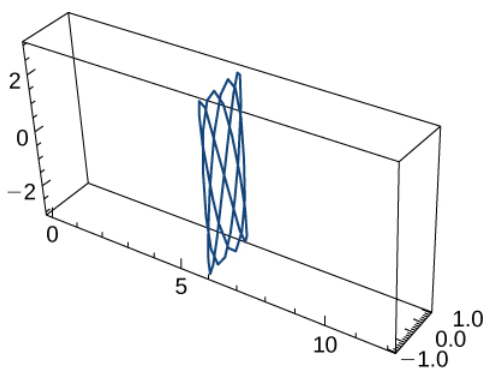
Y aquí una escena interactiva:
Sea $\bold{r}(t) = t\bold{i} + t^2\bold{j} - t^4\bold{k}$ y $\bold{s}(t) = sen(t)\bold{i} + e^t\bold{j} + cos (t)\bold{k}$. Aquí está el gráfico de la función:
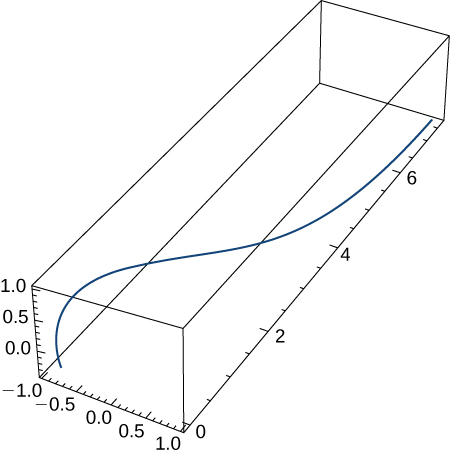
Encuentra lo siguiente:
Una partícula se mueve en una trayectoria circular de radio $b$ de acuerdo con la función $\bold{r}(t) = bcos(ω t)\bold{i} + bsen(ω t)\bold{j}$, donde $ω$ es la velocidad angular, $dθ /dt$.

El vector de posición para una partícula es $\bold{r}(t) = t\bold{i} + t^2\bold{j} + t^3\bold{k}$ El gráfico se muestra a continuación:
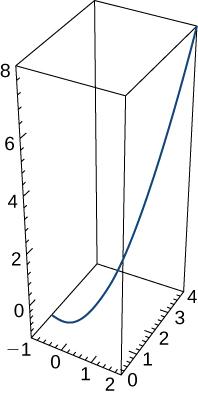
Una partícula viaja a lo largo de la trayectoria de una hélice con la ecuación $\bold{r}(t) = cos(t)\bold{i} + sen(t)\bold{j} + t\bold{k}$.
El gráfico se muestra a continuación:

Una partícula viaja a lo largo del camino de una elipse con la ecuación $\bold{r}(t) = cost\bold{i} + 2sent\bold{j} + 0\bold{k}$. Encuentra lo siguiente:
Dada la función de valor vectorial $\bold{r}(t) = ⟨tant, sect, 0⟩$ (el gráfico se muestra en la página siguiente), encuentra lo siguiente:

Dado $\bold{r}(t) = t\bold{i} + 2sent\bold{j} + 2cost\bold{k}$ y $\bold{u}(t) = \frac{1}{t}\bold{i} + 2sent\bold{j} + 2cost\bold{k}$, encuentra lo siguiente:
Encuentra el vector tangente unitario $\bold{T}(t)$ para las siguientes funciones con valores vectoriales.
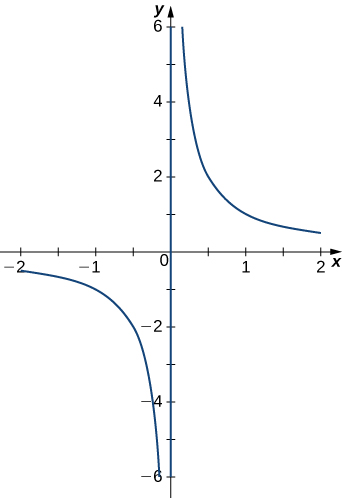
Evalúa las siguientes integrales:
En esta sección, estudiaremos fórmulas relacionadas con curvas en dos y tres dimensiones, y veremos cómo están relacionadas con varias propiedades de la misma curva. Por ejemplo, supongamos que una función con valor vectorial describe el movimiento de una partícula en el espacio. Nos gustaría determinar qué tan lejos ha viajado la partícula en un intervalo de tiempo determinado, que puede describirse por la longitud del arco de la ruta que sigue. O supón que la función de valor vectorial describe una carretera que estamos construyendo y queremos determinar qué tan bruscamente se curva la carretera en un punto dado. Esto se describe por la curvatura de la función en ese punto.
Hemos visto cómo una función de valor vectorial describe una curva en dos o tres dimensiones. Recuerda las fórmulas alternativas para la curvatura, que establece que la fórmula para la longitud del arco de una curva definida por las funciones paramétricas $x = x(t), y = y(t), t_1\le t\le t_2$ viene dada por
$$s = \int_{t_1}^{t_2}\sqrt{(x'(t))^2+(y'(t))^2}dt$$De manera similar, si definimos una curva usando una función de valor vectorial $\bold{r}(t) = f(t)\bold{i} + g(t)\bold{j}$, donde $a\le t\le b$, la longitud del arco viene dada por la fórmula
$$s = \int_a^b\sqrt{(f'(t))^2+(g'(t))^2}dt$$En tres dimensiones, si la función de valor vectorial se describe por $\bold{r}(t) = f(t)\bold{i} + g(t)\bold{j} + h(t)\bold{k}$ durante el mismo intervalo $a\le t\le b$, se da la longitud del arco por
$$s = \int_a^b\sqrt{(f'(t))^2+(g'(t))^2+(h'(t))^2}dt$$Fórmulas de longitud de arco
i. Curva plana: dada una curva suave $C$ definida por la función $\bold{r}(t) = f(t)\bold{i} + g(t)\bold{j}$, donde $t$ se encuentra dentro del intervalo $[a, b]$, la longitud del arco de $C$ sobre el intervalo es
$$s = \int_a^b\sqrt{(f'(t))^2+(g'(t))^2}dt = \int_a^b\|\bold{r'}(t)\|dt\tag{$3.11$}$$ii. Curva espacial: dada una curva suave C definida por la función $\bold{r}(t) = f(t)\bold{i} + g(t)\bold{j} + h(t)\bold{k}$, donde $t$ se encuentra dentro del intervalo $[a, b]$, la longitud del arco de $C$ durante el intervalo es
$$s = \int_a^b\sqrt{(f'(t))^2+(g'(t))^2+(h'(t))^2}dt = \int_a^b\|\bold{r'}(t)\|dt\tag{$3.12$}$$Las dos fórmulas son muy similares; solo difieren en el hecho de que una curva espacial tiene tres funciones componentes en lugar de dos. Ten en cuenta que las fórmulas se definen para curvas suaves; es decir, curvas donde la función de valor vectorial $\bold{r}(t)$ es diferenciable con una derivada distinta de cero.
La condición de suavidad garantiza que la curva no tenga cúspides (o esquinas) que puedan hacer que la fórmula sea problemática.
Encontrar la longitud de arco
Calcula la longitud de arco para cada una de las siguientes funciones con valores vectoriales:
Ahora volvemos a la hélice presentada anteriormente en este capítulo. Una función de valor vectorial que describe una hélice se puede escribir en la forma
$$\bold{r}(t)=Rcos\bigg(\frac{2π Nt}{h}\bigg)\bold{i} + Rsen\bigg(\frac{2π Nt}{h}\bigg)\bold{j} + t\bold{k}, 0\le t\le h$$donde $R$ representa el radio de la hélice, h representa la altura (distancia entre dos giros consecutivos) y la hélice completa $N$ giros. Deduzcamos una fórmula para la longitud del arco de esta hélice usando la Ecuación 3.12:
$$\bold{r'}(t)=-\frac{2π NR}{h}sen\bigg(\frac{2π Nt}{h}\bigg)\bold{i} + \frac{2π NR}{h}cos\bigg(\frac{2π Nt}{h}\bigg)\bold{j} +\bold{k}$$Por lo tanto,
$$\begin{aligned} s &= \|\bold{r'}(t)\|dt\\ &= \int_0^h \sqrt{\bigg(-\frac{2π NR}{h}sen\bigg(\frac{2π Nt}{h}\bigg)\bigg)^2 + \bigg(\frac{2π NR}{h}cos\bigg(\frac{2π Nt}{h}\bigg)\bigg)^2 + 1^2}dt\\ &= \int_0^h \sqrt{\frac{4π^2 N^2R^2}{h^2}\bigg(sen^2\bigg(\frac{2π Nt}{h}\bigg) + cos^2\bigg(\frac{2π Nt}{h}\bigg)\bigg)+1}dt\\ &= \int_0^h \sqrt{\frac{4π^2 N^2R^2}{h^2} +1}dt\\ &= \bigg[t\sqrt{\frac{4π^2 N^2R^2}{h^2} +1}\bigg]_0^1\\ &= h\sqrt{\frac{4π^2N^2R^2+h^2}{h^2}}\\ &= \sqrt{4π^2N^2R^2+h^2} \end{aligned}$$Esto proporciona una fórmula para la longitud de un cable necesario para formar una hélice con $N$ vueltas que tiene radio $R$ y altura $h$.
Ahora tenemos una fórmula para la longitud del arco de una curva definida por una función con valor vectorial. Avancemos un paso más y examinemos qué es una función de longitud de arco.
Si una función de valor vectorial representa la posición de una partícula en el espacio como una función del tiempo, entonces la función de longitud de arco mide qué tan lejos viaja esa partícula en función del tiempo. La fórmula para la función de longitud de arco se sigue directamente de la fórmula para la longitud de arco:
Si la curva tiene dos dimensiones, solo aparecen dos términos debajo de la raíz cuadrada dentro de la integral. La razón para usar la variable independiente $u$ es distinguir entre el tiempo y la variable de integración. Dado que $s (t)$ mide la distancia recorrida en función del tiempo, $s'(t)$ mide la velocidad de la partícula en un momento dado. Como tenemos una fórmula para $s (t)$ en la ecuación 3.13, podemos diferenciar ambos lados de la ecuación:
$$\begin{aligned} s'(t) &= \frac{d}{dt}\bigg[\int_a^t \sqrt{(f'(u))^2+(g'(u))^2+(h'(u))^2}du \bigg]\\ &= \frac{d}{dt}\bigg[\int_a^t \|\bold{r'}(u)\|du\bigg]\\ &= \|\bold{r'}(t)\| \end{aligned}$$Si suponemos que $\bold{r} (t)$ define una curva suave, entonces la longitud del arco siempre aumenta, por lo que $s'(t)\gt 0$ para $t\gt a$. Por último, si $\bold{r} (t)$ es una curva en la que $\| \bold{r'} (t)\| = 1$ para todo $t$, entonces
$$s(t) = \int_a^t \|\bold{r'}(u)\|du = \int_a^t 1du = t-a$$lo que significa que $t$ representa la longitud de arco siempre que $a = 0$.
Función de longitud de arco
Si $\bold{r}(t)$ describe una curva suave para $t\ge a$, entonces la función de longitud de arco viene dada por
$$s(t) = \int_a^t \|\bold{r'}(u)\|du\tag{$3.14$}$$Además, $\frac{ds}{dt} = \|\bold{r'}(t)\|\gt 0$. Si $\|\bold{r'}(t)\| = 1$ para todo $t\ge a$, entonces el parámetro $t$ representa la longitud de arco desde el punto de partida en $t = a$.
Una aplicación útil de este teorema es encontrar una parametrización alternativa de una curva dada, llamada parametrización de longitud de arco. Recuerda que cualquier función de valor vectorial se puede volver a parametrizar mediante un cambio de variables. Por ejemplo, si tenemos una función $r(t) = ⟨3cost, 3sent⟩, 0\le t\le 2π$ que parametriza un círculo de radio $3$, podemos cambiar el parámetro de $t$ a $4t$, obteniendo una nueva parametrización $\bold{r}(t) = ⟨3cos4t, 3sen4t⟩$. La nueva parametrización todavía define un círculo de radio 3, pero ahora solo necesitamos usar los valores $0\le t\le π/2$ para atravesar el círculo una vez.
Supongamos que encontramos la función de longitud de arco $s (t)$ y somos capaces de resolver esta función para $t$ como una función de $s$. Luego podemos volver a parametrizar la función original $r (t)$ sustituyendo la expresión por $t$ nuevamente en $r (t)$. La función de valor vectorial ahora se escribe en términos del parámetro $s$.
Como la variable $s$ representa la longitud del arco, llamamos a esto una parametrización de la función original $\bold{r} (t)$. Una ventaja de encontrar la parametrización de longitud de arco es que la distancia recorrida a lo largo de la curva a partir de $s = 0$ ahora es igual al parámetro $s$. La parametrización de longitud de arco también aparece en el contexto de la curvatura (que examinaremos más adelante en esta sección) y las integrales de línea, que estudiaremos en el capítulo de cálculo vectorial.
Antes de presentar un ejemplo, observa otra deducción para la longitud de arco en la siguiente escena interactiva, diseñada por Yin Bon Ku en GeoGebra (amplía la escena para una mejor interacción).
Encontrar una parametrización de la longitud de arco
Encuentra la parametrización de longitud de arco para cada una de las siguientes curvas:
Un tema importante relacionado con la longitud de arco es la curvatura. El concepto de curvatura proporciona una manera de medir cuán bruscamente gira una curva suave. Una circunferencia tiene una curvatura constante. Cuanto más pequeño es el radio de la circunferencia, mayor es la curvatura.
Piensa en conducir por una carretera. Supongamos que el camino se encuentra en un arco de una gran circunferencia. En este caso, apenas tendrías que girar la rueda para mantenerte en el camino. Ahora supón que el radio es más pequeño. En este caso, deberás girar más bruscamente para mantenerte en el camino. En el caso de una curva que no sea una circunferencia, a menudo es útil primero inscribir una circunferencia en la curva en un punto dado para que sea tangente a la curva en ese punto y "abrace" la curva lo más cerca posible en un vecindad del punto (). La curvatura del gráfico en ese punto se define entonces como la curvatura de la circunferencia inscrita.
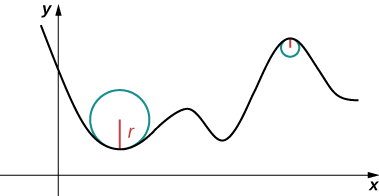
Sea $C$ una curva suave en el plano o en el espacio dada por $\bold{r}(s)$, donde $s$ es el parámetro de longitud de arco. La curvatura $κ$ en $s$ es
$$κ = \bigg\|\frac{d\bold{T}}{ds}\bigg\|= \|\bold{T'}(s)\|$$donde $\bold{T}(t)$ representa el vector unitario tangente dado por $\bold{T}(t) = \frac{\bold{r'}(t)}{\|\bold{r'}(t)\|}$.
La fórmula en la definición de curvatura no es muy útil en términos de cálculo. Para usar la fórmula de curvatura, primero es necesario expresar $\bold{r}(t)$ en términos del parámetro de longitud de arco $s$, luego encontrar el vector tangente unitario $\bold{T}(s)$ para la función $r(s)$, luego tomar la derivada de $\bold{T}(s)$ con respecto a $s$.
Este es un proceso tedioso. Afortunadamente, hay fórmulas equivalentes para la curvatura.
Fórmulas alternativas para la curvatura
Si $C$ es una curva suave dada por $\bold{r}(t)$, entonces la curvatura $κ$ de $C$ en $t$ está dada por
$$κ = \frac{\|\bold{T'}(t)\|}{\|\bold{r'}(t)\|}\tag{$3.15$}$$Si $C$ es una curva tridimensional, la fórmula puede dar la curvatura
$$κ = \frac{\|\bold{r'}(t)×\bold{r''}\|}{\|\bold{r'}(t)\|^3}\tag{$3.16$}$$Si $C$ es la gráfica de una función $y = f(x)$ y existen $y'$ e $y''$, entonces la curvatura $κ$ en el punto $(x,y)$ viene dada por
$$κ = \frac{|y''|}{[1+(y')^2]^(3/2)}\tag{$3.17$}$$La primera fórmula se sigue directamente de la regla de la cadena:
$$\frac{d\bold{T}}{dt} = \frac{d\bold{T}}{ds}\frac{ds}{dt}$$donde $s$ es la longitud del arco a lo largo de la curva $C$. Dividiendo ambos lados por $ds / dt$, y tomando la magnitud, obtenemos:
$$\bigg\|\frac{d\bold{T}}{ds}\bigg\| = \bigg\|\frac{\bold{T'}(t)}{\frac{ds}{dt}} \bigg\|$$Como $ds/dt = \|\bold{r'}(t)\|$, esto proporciona la fórmula para la curvatura $κ$ de una curva $C$ en términos de cualquier parametrización de $C$:
$$κ = \frac{\|\bold{T'}(t)\|}{\|\bold{r'}(t)\|}$$En el caso de una curva tridimensional, comenzamos con las fórmulas $\bold{T}(t) = (\bold{r'}(t))/ \|\bold{r'}(t)\|$ y $ds/dt = \|\bold{r'}(t)\|$. Por lo tanto, $\bold{r'}(t) = (ds/dt)\bold{T}(t)$. Podemos tomar la derivada de esta función usando la fórmula del producto escalar:
$$\bold{r''}(t)=\frac{d^2s}{dt^2}\bold{T}(t) + \frac{ds}{dt}\bold{T'}(t)$$Usando estas dos últimas ecuaciones obtenemos
$$\begin{aligned} \bold{r'}(t)×\bold{r''}(t) &= \frac{ds}{dt}\bold{T}(t)×\bigg(\frac{d^2s}{dt^2}\bold{T}(t) + \frac{ds}{dt}\bold{T'}(t)\bigg)\\ &= \frac{ds}{dt}\bold{T}(t)×\bold{T}(t) + \big(\frac{ds}{dt}\big)^2\bold{T}(t)×\bold{T'}(t) \end{aligned}$$Como $\bold{T}(t)×\bold{T}(t) = 0$, esto se reduce a
$$\bold{r'}(t)×\bold{r''}(t) = \bigg(\frac{ds}{dt}\bigg)^2\bold{T}(t)×\bold{T'}(t)$$Como $\bold{T'}$ es paralelo a $N$ y $\bold{T}$ es ortogonal a $N$, se deduce que $\bold{T}$ y $\bold{T'}$ son ortogonales. Esto significa que $\|\bold{T}×\bold{T'}\| = \|\bold{T}\|\|\bold{T'}\|sen (π/2) = \|\bold{T'}\|$, entonces
$$\bold{r'}(t)×\bold{r''}(t) = \bigg(\frac{ds}{dt}\bigg)^2\|\bold{T'}(t)\|$$Ahora resolvemos esta ecuación para $\|\bold{T'}(t)\|$ y usamos el hecho de que $ds/dt = \|\bold{r'}(t)\|$:
$$|\bold{T'}(t)\| = \frac{\|\bold{r'}(t)×\bold{r''}(t)\|}{\|\bold{r'}(t)\|^2}$$Luego, dividimos ambos lados entre $\|\bold{r'}(t)\|$. Esto da
$$κ = \frac{|\bold{T'}(t)\|}{|\bold{r'}(t)\|} = \frac{\|\bold{r'}(t)×\bold{r''}(t)\|}{\|\bold{r'}(t)\|^3}$$Esto prueba la ecuación 3.16. Para probar la Ecuación 3.17, comenzamos con el supuesto de que la curva $C$ está definida por la función $y = f(x)$. Entonces, podemos definir $\bold{r}(t) = x\bold{i} + f(x)\bold{j} + 0\bold{k}$. Usando la fórmula anterior para la curvatura:
$$\begin{aligned} \bold{r'}(t) &= \bold{i} +f'(x)\bold{j}\\ \bold{r''}(t) &= f''(x)\bold{j}\\ \bold{r'}(t)×\bold{r''}(t) &= \begin{vmatrix} \bold{i} & \bold{j} & \bold{k}\\ 1 & f'(x) & 0\\ 0 & f''(x) & 0 \end{vmatrix} = f''(x)\bold{k} \end{aligned}$$Por lo tanto,
Encontrar la curvatura
Encuentra la curvatura para cada una de las siguientes curvas en el punto dado:
En la página siguiente, puedes interactuar con una escena interactiva, diseñada por Bed Prasad Dhakal en GeoGebra. Observa que hemos parametrizado la primera curva del ejercicio anterior, para la cual, la curvatura es $κ = \frac{4}{25} = 0.16$ y es constante para cualquier valor de $t$. Puedes cambiar los componentes de la curva y el valor del parámetro $t$ (amplía la escena para una mejor interacción).
Hemos visto que la derivada $\bold{r'}(t)$ de una función con valor vectorial es un vector tangente a la curva definida por $\bold{r}(t)$, y el vector tangente unitario $\bold{T}(t)$ se puede calcular dividiendo $\bold{r'}(t)$ por su magnitud.
Al estudiar el movimiento en tres dimensiones, otros dos vectores son útiles para describir el movimiento de una partícula a lo largo de un camino en el espacio: el vector normal principal unitario y el vector binormal.
Sea $C$ una curva suave tridimensional representada por $\bold{r}(t)$ sobre un intervalo abierto $I$. Si $\bold{T'}(t) ≠ 0$, entonces el vector normal principal en $t$ se define como
$$\bold{N}(t) = \frac{\bold{T'}(t)}{\|\bold{T'}(t)\|}\tag{$3.18$}$$El vector binormal en $t$ se define como
$$\bold{B}(t) = \bold{T}(t)×\bold{N}(t)\tag{$3.19$}$$donde $\bold{T}(t)$ es el vector tangente unitario y $\bold{N}(t)$ un vector normal unitario.
Observa que, por definición, el vector binormal es ortogonal tanto al vector tangente unitario como al vector normal. Además, $\bold{B}(t)$ es siempre un vector unitario. Esto se puede demostrar usando la fórmula para la magnitud de un producto cruz
$$\|\bold{B}(t)\| = \|\bold{T}(t)×\bold{N}\| = \|\bold{T}(t)\|\|\bold{N}(t)\|senθ$$donde $θ$ es el ángulo entre $\bold{T}(t)$ y $\bold{N}(t)$. Dado que $\bold{N}(t)$ es la derivada de un vector unitario, la propiedad (vii) de la derivada de una función con valor vectorial nos dice que $\bold{T}(t)$ y $\bold{N}(t)$ son ortogonales entre sí, por lo que $θ =π/2$. Además, ambos son vectores unitarios, por lo que su magnitud es $1$. Por lo tanto, $\|\bold{T}(t)\|\|\bold{N}(t)\|senθ = (1)(1)sen(π /2) = 1$ y $\bold{B}(t)$ es un vector unitario.
El vector normal unitario principal puede ser difícil de calcular porque el vector tangente unitario implica un cociente, y este cociente a menudo tiene una raíz cuadrada en el denominador. En el caso tridimensional, encontrar el producto cruz del vector tangente unitario y el vector normal unitario puede ser aún más engorroso. Afortunadamente, tenemos fórmulas alternativas para encontrar estos dos vectores, que se presentan en el próximo apartado.
Encontrar el vector normal principal unitario y el vector binormal
Para cada una de las siguientes funciones con valores vectoriales, encuentra el vector normal principal unitario. Luego, si es posible, encuentra el vector binormal.
Para cualquier curva suave en tres dimensiones que esté definida por una función de valor vectorial, ahora tenemos fórmulas para el vector tangente unitario $\bold{T}$, el vector normal unitario $\bold{N}$ y el vector binormal $\bold{B}$. El vector normal unitario y el vector binormal forman un plano que es perpendicular a la curva en cualquier punto de la curva, llamado plano normal. Además, estos tres vectores forman un marco de referencia en un espacio tridimensional llamado marco de referencia de Frenet (también llamado marco TNB) (). El plano determinado por los vectores $\bold{T}$ y $\bold{N}$ forman el plano osculador de $C$ en cualquier punto $P$ de la curva.
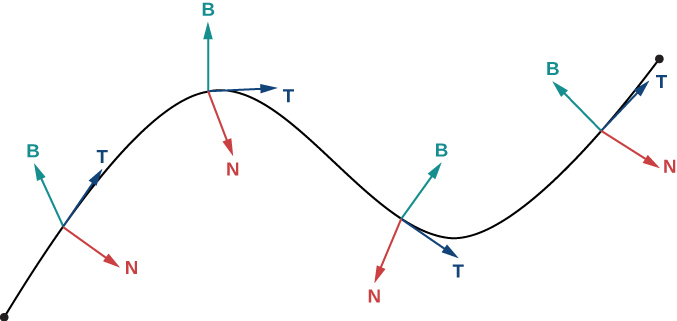
Supongamos que formamos un círculo en el plano osculador de $C$ en el punto $P$ de la curva. Supón que el círculo tiene la misma curvatura que la curva en el punto $P$ y deja que el círculo tenga un radio $r$. Luego, la curvatura del círculo viene dada por $1/r$. Llamamos $r$ el radio de curvatura de la curva, y es igual al recíproco de la curvatura. Si este círculo se encuentra en el lado cóncavo de la curva y es tangente a la curva en el punto $P$, entonces este círculo se llama círculo osculador de $C$ en $P$, como se muestra en la siguiente figura y en la escena interactiva anterior.

Encontrar la ecuación de un círculo osculador
Encuentra la ecuación del círculo osculador de la hélice definida por la función $y = x^3-3x + 1$ en $x = 1$.
Encuentra la longitud del arco de la curva en el intervalo dado.
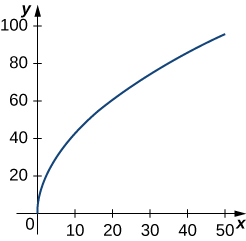
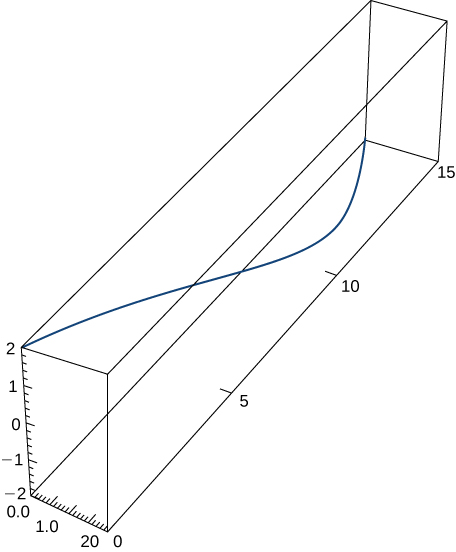
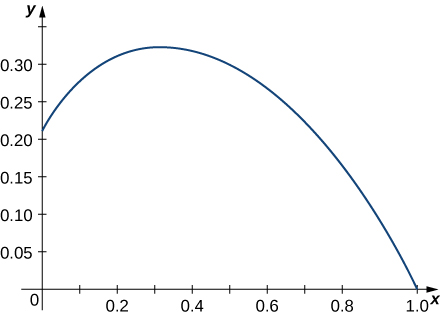
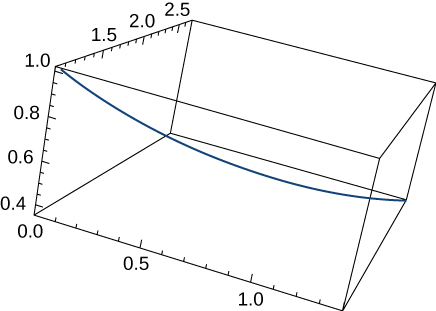
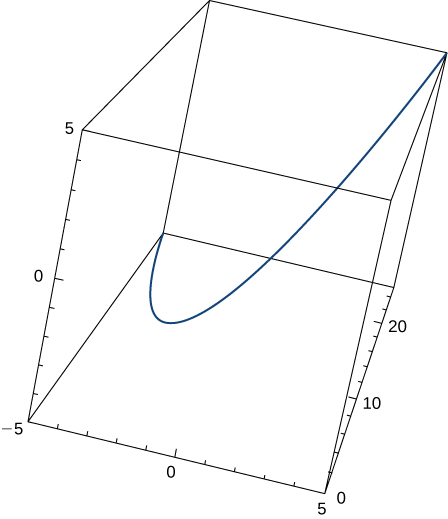
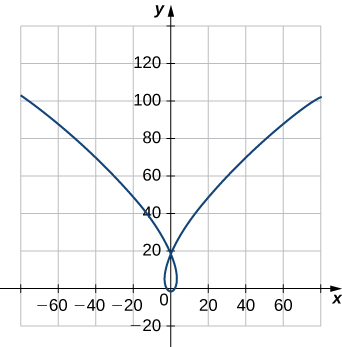
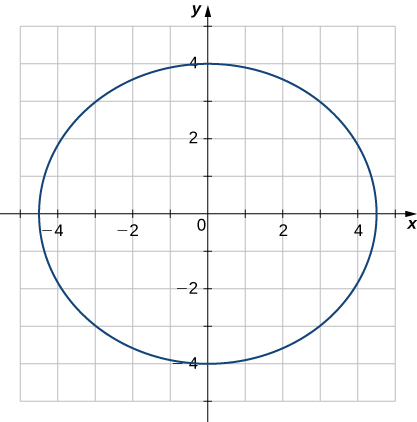
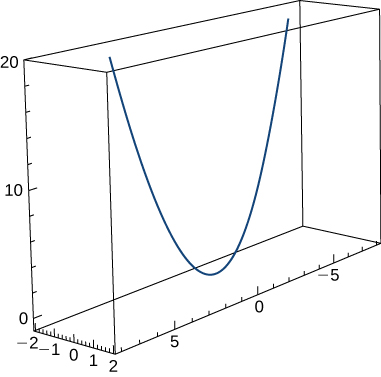
Una partícula se mueve a lo largo de la curva plana $C$ descrita por $\bold{r}(t) = t\bold{i} + t^2\bold{j}$. Resuelve los siguientes problemas.
La superficie de una copa grande se forma al girar la gráfica de la función $y = 0.25x^{1.6}$ de $x = 0$ a $x = 5$ alrededor del eje $y$ (medido en centímetros).
Ahora hemos visto cómo describir curvas en el plano y en el espacio, y cómo determinar sus propiedades, como la longitud de arco y la curvatura. Todo esto lleva al objetivo principal de este capítulo, que es la descripción del movimiento a lo largo de curvas planas y curvas espaciales. Ahora tenemos todas las herramientas que necesitamos. En esta sección, reunimos estas ideas y veremos cómo usarlas.
Nuestro punto de partida es utilizar funciones con valores vectoriales para representar la posición de un objeto en función del tiempo. Todo el material siguiente se puede aplicar a curvas en el plano o a curvas espaciales. Por ejemplo, cuando observamos la órbita de los planetas, todas las curvas que definen estas órbitas se encuentran en un plano porque son elípticas. Sin embargo, una partícula que viaja a lo largo de una hélice se mueve en una curva en tres dimensiones.
Supongamos que $\bold{r}(t)$ es una función de valor vectorial dos veces diferenciable del parámetro $t$ que representa la posición de un objeto en función del tiempo. El vector de velocidad $\bold{v}(t)$ del objeto viene dado por
$$\text{Velocidad } = \bold{v}(t) = \bold{r'}(t)\tag{$3.20$}$$El vector de aceleración $\bold{a}(t)$ se define como
$$\text{Aceleración} = \bold{a}(t) = \bold{v'}(t) = \bold{r''}(t)\tag{$3.21$}$$La rapidez se define como:
$$\text{Rapidez} = v(t) = \|\bold{v}(t)\| = \|\bold{r'}(t)\| = \frac{ds}{dt}\tag{$3.22$}$$Como $\bold{r}(t)$ puede estar en dos o tres dimensiones, estas funciones con valores vectoriales pueden tener dos o tres componentes. En dos dimensiones, definimos $\bold{r}(t) = x(t)\bold{i} + y(t)\bold{r}$ y en tres dimensiones $\bold{r}(t) = x(t)\bold{i} + y(t)\bold{j} + z(t)\bold{k}$. Entonces, la velocidad, la aceleración y la rapidez se pueden escribir como se muestra en la siguiente tabla.
| Cantidad | Dos dimensiones | Tres dimensiones |
| Posición | $\bold{r}(t) = x(t)\bold{i}+y(t)\bold{j}$ | $\bold{r}(t) = x(t)\bold{i}+y(t)\bold{j}+z(t)\bold{k}$ |
| Velocidad | $\bold{v}(t) = x'(t)\bold{i}+y'(t)\bold{j}$ | $\bold{v}(t) = x'(t)\bold{i}+y'(t)\bold{j}+z'(t)\bold{k}$ |
| Aceleración | $\bold{a}(t) = x''(t)\bold{i}+y''(t)\bold{j}$ | $\bold{a}(t) = x''(t)\bold{i}+y''(t)\bold{j}+z''(t)\bold{k}$ |
| Rapidez | $v(t) = (x'(t))^2+(y'(t))^2$ | $v(t) = (x'(t))^2+(y'(t))^2+(z'(t))^2$ |
Tabla 3.4 Fórmulas para posición, velocidad, aceleración y rapidez
Estudiar el movimiento a lo largo de una parábola
Una partícula se mueve en una trayectoria parabólica definida por la función de valor vectorial $\bold{r}(t) = t^2\bold{i} + \sqrt{5 - t^2}\bold{j}$, donde $t$ mide el tiempo en segundos.
Para obtener una mejor comprensión de los vectores de velocidad y aceleración, imagina que conduces por una carretera con curvas. Si no giras el volante, continuarías en línea recta y saldrías corriendo de la carretera. La velocidad a la que viajas cuando sales de la carretera, junto con la dirección, proporciona un vector que representa tu velocidad, como se ilustra en la siguiente figura.
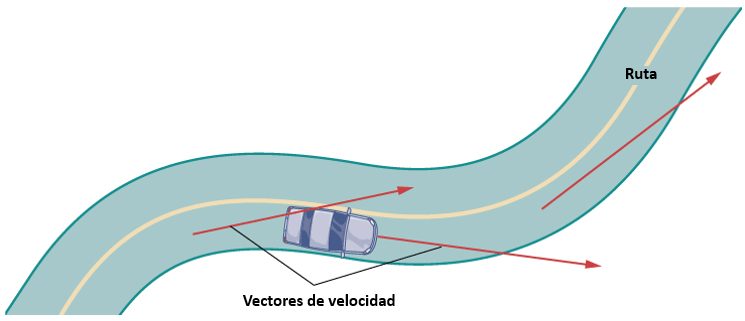
Sin embargo, el hecho de que debes girar el volante para permanecer en el camino indica que tu velocidad siempre está cambiando (incluso si tu rapidez no lo está) porque tu dirección cambia constantemente para mantenerte en el camino.
A medida que giras a la derecha, tu vector de aceleración también apunta a la derecha. A medida que giras hacia la izquierda, tu vector de aceleración apunta hacia la izquierda. Esto indica que tus vectores de velocidad y aceleración cambian constantemente, independientemente de si tu rapidez real varía ().

Podemos combinar algunos de los conceptos discutidos en el apartado anterior sobre Longitud de arco y Curvatura con el vector de aceleración para obtener una comprensión más profunda de cómo este vector se relaciona con el movimiento en el plano y en el espacio.
Recuerda que el vector tangente unitario $\bold{T}$ y el vector normal unitario $\bold{N}$ forman un plano osculador en cualquier punto $P$ en la curva definida por una función de valor vectorial $\bold{r}(t)$. El siguiente teorema muestra que el vector de aceleración $\bold{a}(t)$ se encuentra en el plano de osculación y puede escribirse como una combinación lineal del vector tangente unitario y los vectores unitarios normales.
El plano del vector de aceleración
El vector de aceleración $\bold{a}(t)$ de un objeto que se mueve a lo largo de una curva trazada por una función doblemente diferenciable $\bold{r}(t)$ se encuentra en el plano formado por el vector unitario tangente $\bold{T}(t)$ y el vector normal unitario principal $\bold{N}(t)$ a $C$. Además,
$$\bold{a}(t) = v'(t)\bold{T}(t) + [v(t)]^2κ \bold{N}(t)$$Aquí, v(t) es la rapidez del objeto y $κ$ es la curvatura de $C$ trazada por $\bold{r} (t)$.
Debido a que $\bold{v}(t) = \bold{r'}(t)$ y $\bold{T}(t) = \frac{\bold{r'}(t)}{\|\bold{r'}(t)\|}$, tenemos $\bold{v}(t) = \|\bold{r'}(t)\|\bold{T}(t) = v(t)\bold{T}(t)$. Ahora diferenciamos esta ecuación:
$$\bold{a}(t) = \bold{v'}(t) = \frac{d}{dt}(v(t)\bold{T}(t)) = v'(t)\bold{T}(t) + v(t)\bold{T'}(t)$$Como $\bold{N}(t) = \frac{\bold{T'}(t)}{\|\bold{T'}(t)\|}$, sabemos que $\bold{T'}(t) = \|\bold{T'}(t)\|\bold{N}(t)$, entonces
Una fórmula para la curvatura es $κ = \frac{\|\bold{T'}(t)\|}{\|\bold{r'}(t)\|}$, entonces $\|\bold{T'}(t)\| = κ \|\bold{r'}(t)\| = κ v(t)$. Esto da $\bold{a}(t) = v'(t)\bold{T}(t) + κ (v(t))^2\bold{T}(t)$.
Los coeficientes de $\bold{T}(t)$ y $\bold{N}(t)$ se denominan componente tangencial de la aceleración y componente normal de la aceleración, respectivamente. Escribimos $a_{\bold{T}}$ para denotar el componente tangencial y $a_{\bold{N}}$ para denotar el componente normal.
Componentes tangencial y normal de la aceleración
Sea $\bold{r}(t)$ una función de valor vectorial que denota la posición de un objeto en función del tiempo. Entonces $\bold{a}(t) = \bold{r''}(t)$ es el vector de aceleración. Los componentes tangencial y normal de la aceleración $a_{\bold{T}}$ y $a_{\bold{N}}$ están dados por las fórmulas
$$a_{\bold{T}} = \bold{a} ⋅ \bold{T} = \frac{\bold{v} ⋅ \bold{a}}{\|\bold{v}\|}\tag{$3.23$}$$ $$a_{\bold{N}} = \bold{a} ⋅ \bold{N} = \frac{\|\bold{v}×\bold{a}\|}{\|\bold{v}\|}= \sqrt{\|\bold{a}\|^2-a_{\bold{T}}^2}\tag{$3.24$}$$Estos componentes están relacionados por la fórmula
$$\bold{a}(t) = a_{\bold{T}}\bold{T}(t) + a_{\bold{N}}\bold{N}(t)\tag{$3.25$}$$Aquí $\bold{T}(t)$ es el vector tangente unitario de la curva $\bold{r}(t)$, y $\bold{N}(t)$ es el vector normal unitario de la curva $\bold{r}(t)$.
El componente normal de la aceleración también se denomina componente centrípeto de la aceleración o, a veces, componente radial de la aceleración. Para comprender la aceleración centrípeta, supón que viajas en un automóvil en una pista circular a una velocidad constante. Luego, como vimos anteriormente, el vector de aceleración apunta hacia el centro de la pista en todo momento. Como conductor del automóvil, sientes un tirón hacia el exterior de la pista porque estás girando constantemente. Esta sensación actúa en la dirección opuesta de la aceleración centrípeta. Lo mismo es válido para los caminos no circulares. La razón es que tu cuerpo tiende a viajar en línea recta y resiste la fuerza resultante de la aceleración que te empuja hacia un lado. Ten en cuenta que en el punto $B$ de la , el vector de aceleración apunta hacia atrás. Esto se debe a que el automóvil está desacelerando a medida que avanzas en la curva.
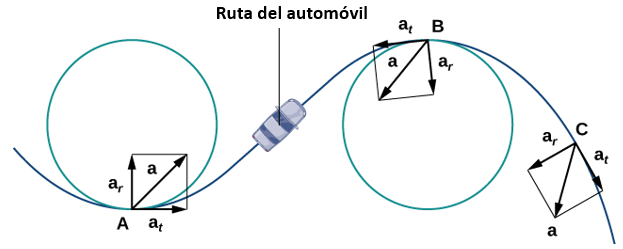
Los vectores unitarios tangencial y normal, en cualquier punto dado de la curva, proporcionan un marco de referencia en ese punto. Los componentes tangencial y normal de la aceleración son las proyecciones del vector de aceleración en $\bold{T}$ y $\bold{N}$, respectivamente.
Encontrar los componentes de aceleración
Una partícula se mueve en una ruta definida por la función de valor vectorial $\bold{r}(t) = t^2\bold{i} + (2t - 3)\bold{j} + (3t^2-3t)\bold{k}$, donde $t$ mide el tiempo en segundos y la distancia se mide en pies.
Ahora veamos una aplicación de funciones con valores vectoriales. En particular, consideremos el efecto de la gravedad en el movimiento de un objeto a medida que viaja por el aire y cómo determina la trayectoria resultante de ese objeto. A continuación, ignoramos el efecto de la resistencia del aire. Esta situación, con un objeto que se mueve con una velocidad inicial pero sin fuerzas que actúen sobre él aparte de la gravedad, se conoce como movimiento de proyectiles. Describe el movimiento de objetos desde pelotas de golf hasta pelotas de béisbol y desde flechas hasta balas de cañón.
Primero tenemos que elegir un sistema de coordenadas. Si estamos parados en el origen de este sistema de coordenadas, entonces elegimos que el eje $y$ positivo esté hacia arriba, el eje $y$ negativo hacia abajo, y el eje $x$ positivo hacia adelante (es decir, lejos del lanzador de el objeto).
El efecto de la gravedad es hacia abajo, por lo que la segunda ley de Newton nos dice que la fuerza sobre el objeto resultante de la gravedad es igual a la masa del objeto multiplicada por la aceleración resultante de la gravedad, o $\bold{F}_g = mg$, donde $\bold{F}_g$ representa la fuerza de la gravedad y $g$ representa la aceleración resultante de la gravedad en la superficie de la Tierra. El valor de $g$ en el sistema de medición inglés es de aproximadamente $32 pies / seg^2$ y de aproximadamente $9.8 m / seg^2$ en el sistema métrico. Esta es la única fuerza que actúa sobre el objeto. Como la gravedad actúa en dirección descendente, podemos escribir la fuerza resultante de la gravedad en la forma $\bold{F}_g = -mg\bold{j}$, como se muestra en la siguiente figura.
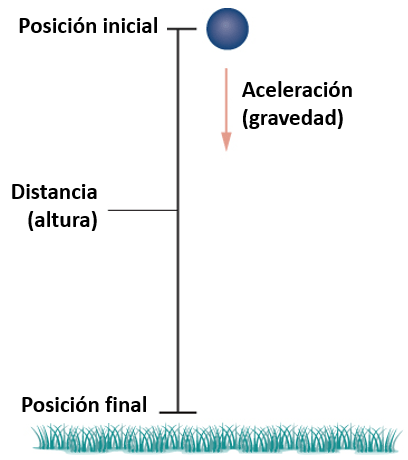
La segunda ley de Newton también nos dice que $\bold{F} = m\bold{a}$, donde $\bold{a}$ representa el vector de aceleración del objeto. Esta fuerza debe ser igual a la fuerza de la gravedad en todo momento, por lo que sabemos que
$$\begin{aligned} \bold{F} &= \bold{F}_g\bold{j}\\ m\bold{a} &= -mg\\ \bold{a} &= -g\bold{j} \end{aligned}$$Ahora recurrimos al hecho de que el vector de aceleración es la primera derivada del vector de velocidad. Por lo tanto, podemos reescribir la última ecuación en la forma
$$\bold{v'}(t) = - g\bold{j}$$Al tomar la antiderivada de cada lado de esta ecuación obtenemos
$$\begin{aligned} \bold{v}(t) &= \int - g\bold{j}dt\\ &= -gt\bold{j} + \bold{C_1} \end{aligned}$$para algún vector constante $\bold{C_1}$. Para determinar el valor de este vector, podemos usar la velocidad del objeto en un tiempo fijo, digamos en el tiempo $t = 0$. Llamamos a esta velocidad la velocidad inicial: $\bold{v}(0) = \bold{v_0}$. Por lo tanto, $\bold{v}(0) = - g(0)\bold{j} + \bold{C_1} = \bold{v_0}$ y $\bold{C_1} = \bold{v_0}$. Esto da el vector de velocidad como $\bold{v}(t) = - gt\bold{j} + \bold{v_0}$.
A continuación, usamos el hecho de que la velocidad $\bold{v}(t)$ es la derivada de la posición $\bold{s}(t)$. Esto da la ecuación
$$\bold{s'}(t) = - gt\bold{j} + \bold{v_0}$$Tomar la antiderivada de ambos lados de esta ecuación conduce a
$$\begin{aligned} \bold{s}(t) &= \int (-gt\bold{j}+\bold{v_0})dt\\ &= -\frac{1}{2}gt^2\bold{j}+\bold{v_0}t + \bold{C_2} \end{aligned}$$con otro vector constante desconocido $\bold{C_2}$. Para determinar el valor de $\bold{C_2}$, podemos usar la posición del objeto en un momento dado, digamos en el tiempo $t = 0$.
Llamamos a esta posición la posición inicial: $\bold{s}(0) = \bold{s_0}$. Por lo tanto, $\bold{s}(0) = -(1/2)g(0)^2\bold{j} + \bold{v_0}(0) + \bold{C_2} = \bold{s_0}$ y $\bold{C_2} = \bold{s_0}$. Esto proporciona la posición del objeto en cualquier momento como
$$\bold{s}(t) = -\frac{1}{2}gt^2\bold{j}+\bold{v_0}t+\bold{s_0}$$Echemos un vistazo más de cerca a la velocidad inicial y la posición inicial. En particular, supón que el objeto se lanza hacia arriba desde el origen en un ángulo $θ$ con la horizontal, con una velocidad inicial $\bold{v_0}$
¿Cómo podemos modificar el resultado anterior para reflejar este escenario? Primero, podemos suponer que se arroja desde el origen. Si no, entonces podemos mover el origen al punto desde donde se arroja. Por lo tanto, $\bold{s_0} = 0$, como se muestra en la siguiente figura.
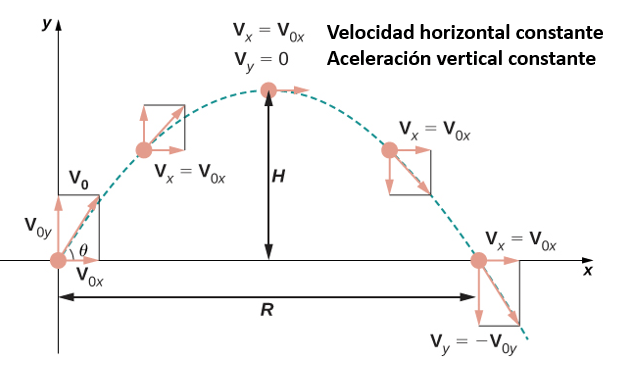
Podemos reescribir el vector de velocidad inicial en la forma $\bold{v_0} = v_0 cosθ \bold{i} + v_0 senθ\bold{j}$. Entonces la ecuación para la función de posición $\bold{s}(t)$ se convierte en
$$\begin{aligned} \bold{s}(t) &= -\frac{1}{2}gt^2\bold{j}+v_0tcosθ\bold{i}+ v_0 tsenθ\bold{j}\\ &= v_0 tcosθ\bold{i}+v_0 tsenθ\bold{j}-\frac{1}{2}gt^2\bold{j}\\ &= v_0 tcosθ\bold{i}+(v_0 tsenθ-\frac{1}{2}gt^2)\bold{j} \end{aligned}$$El coeficiente de $\bold{i}$ representa la componente horizontal de $\bold{s}(t)$ y es la distancia horizontal del objeto desde el origen en el tiempo $t$. El valor máximo de la distancia horizontal (medido a la misma altitud inicial y final) se denomina rango $R$. El coeficiente de $\bold{j}$ representa la componente vertical de $\bold{s}(t)$ y es la altitud del objeto en el tiempo $t$.
El valor máximo de la distancia vertical es la altura $H$.
Movimiento de una bala de cañón
Durante una celebración, se dispara una bala de cañón desde un cañón en un acantilado hacia el agua. El cañón apunta a un ángulo de $30°$ sobre la horizontal y la velocidad inicial de la bala de cañón es de $600\; pies / seg$. El acantilado está a 100 pies sobre el agua ().

En la siguiente escena interactiva, tomada de PhET Interactive Simulations de la University of Colorado Boulder, puedes lanzar diferentes tipos de objetos desde un cañón, con el objetivo de dar en el blanco. Sin embargo, si seleccionas la opción "vectores", puedes observar los componentes vectoriales de la velocidad y la aceleración y verificar que la velocidad horizontal y la aceleración vertical permanecen constantes; para ello, activa los componentes de velocidad y aceleración y, luego, pulsas el botón "pausa" y vas adelantando lentamente la animación.
Queda una última pregunta: en general, ¿cuál es la distancia máxima que puede recorrer un proyectil, dada su velocidad inicial? Para determinar esta distancia, asumimos que el proyectil se dispara desde el nivel del suelo y deseamos que regrese al nivel del suelo.
En otras palabras, queremos determinar una ecuación para el rango. En este caso, la ecuación de movimiento de proyectil es
$$\bold{s}(t) = v_0 tcosθ\bold{i}+\big(v_0 tsenθ -\frac{1}{2}gt^2\big)\bold{j}$$Hacer el segundo componente igual a cero y resolver $t$ produce
$$\begin{aligned} v_0 tsenθ -\frac{1}{2}gt^2)\bold{j} &= 0\\ t\big(v_0 senθ-\frac{1}{2}gt\big) \end{aligned}$$Por lo tanto, $t = 0$ o $t = \frac{2v_0 senθ}{g}$. Estamos interesados en el segundo valor de $t$, por lo que lo sustituimos en $\bold{s}(t)$, que da
$$\begin{aligned} \bold{s}\bigg(\frac{2v_0 senθ}{g}\bigg) &= v_0\bigg(\frac{2v_0 senθ}{g}\bigg)cosθ\bold{i} +\Bigg(v_0\bigg(\frac{2v_0 senθ}{g}\bigg)senθ\\ &- \frac{1}{2}g\bigg(\frac{2v_0senθ}{g}\bigg)^2\Bigg)\bold{j}\\ &= \frac{2v_0^2 senθ cosθ}{g}\bold{i}\\ &= \frac{v_0^2sen2θ}{g}\bold{i} \end{aligned}$$Por lo tanto, la expresión para el alcance o rango de un proyectil disparado en un ángulo $θ$ es
$$R = \frac{v_0^2sen2θ}{g}\bold{i}$$La única variable en esta expresión es $θ$. Para maximizar la distancia recorrida, toma la derivada del coeficiente de $\bold{i}$ con respecto a $θ$ y hazlo igual a cero:
$$\begin{aligned} \frac{d}{dθ}\bigg(\frac{v_0^2 sen2θ}{g}\bigg) &= 0\\ \frac{2v_0^2cos2θ}{g} &= 0\\ θ &= 45° \end{aligned}$$Este valor de $θ$ es el valor positivo más pequeño que hace que la derivada sea igual a cero. Por lo tanto, en ausencia de resistencia al aire, el mejor ángulo para disparar un proyectil (para maximizar el alcance) está en un ángulo de $45°$. La distancia que viaja viene dada por
$$\bold{s}\bigg(\frac{2v_0sen45}{g} \bigg) = \frac{v_0^2sen90}{g}\bold{i} = \frac{v_0^2}{g}\bold{j}$$Por lo tanto, el rango para un ángulo de $45°$ es $v_0^2/g$.
A principios del siglo XVII, Johannes Kepler pudo utilizar los datos sorprendentemente precisos de su mentor Tycho Brahe, para formular sus tres leyes de movimiento planetario, ahora conocidas como las leyes de movimiento planetario de Kepler. Estas leyes también se aplican a otros objetos en el sistema solar en órbita alrededor del Sol, como los cometas (por ejemplo, el cometa Halley) y los asteroides. Las variaciones de estas leyes se aplican a los satélites en órbita alrededor de la Tierra.
Las leyes del movimiento planetario de Kepler

La tercera ley de Kepler es especialmente útil cuando se usan unidades apropiadas. En particular, $1\;\text{ unidad astronómica }\;$ se define como la distancia promedio de la Tierra al Sol, y ahora se reconoce que es $149,597,870,700\; mo$ aproximadamente $93,000,000\;\text{ millas}$. Por lo tanto, escribimos $1 A.U. = 93,000,000\;\text{ mi}$. Dado que el tiempo que tarda la Tierra en orbitar al Sol es de 1 año, utilizamos los años terrestres por unidades de tiempo. Luego, sustituyendo 1 año por el período de la Tierra y 1 A.U. para la distancia promedio al Sol, la tercera ley de Kepler se puede escribir como
$$T_p^2 = D_p^3$$para cualquier planeta en el sistema solar, donde $T_P$ es el período de ese planeta medido en años terrestres y $D_P$ es la distancia promedio de ese planeta al Sol medido en unidades astronómicas. Por lo tanto, si conocemos la distancia promedio de un planeta al Sol (en unidades astronómicas), podemos calcular la duración de su año (en años terrestres) y viceversa.
Las leyes de Kepler fueron formuladas en base a observaciones de Brahe; sin embargo, no se probaron formalmente hasta que Sir Isaac Newton pudo aplicar el cálculo. Además, Newton pudo generalizar la tercera ley de Kepler a otros sistemas orbitales, como una luna que orbita alrededor de un planeta. La tercera ley original de Kepler solo se aplica a los objetos que orbitan alrededor del Sol.
Probemos ahora la primera ley de Kepler usando el cálculo de funciones con valores vectoriales. Primero necesitamos un sistema de coordenadas.
Coloquemos el Sol en el origen del sistema de coordenadas y dejemos que la función de valor vectorial $\bold{r}(t)$ represente la ubicación de un planeta en función del tiempo. Newton probó la ley de Kepler usando su segunda ley de movimiento y su ley de gravitación universal. La segunda ley de movimiento de Newton se puede escribir como $\bold{F} = m\bold{a}$, donde $\bold{F}$ representa la fuerza neta que actúa en el planeta. Su ley de gravitación universal se puede escribir en la forma
$\bold{F} = -\frac{GmM}{\|r\|^2} ⋅ \frac{r}{\|r\|}$, lo que indica que la fuerza resultante de la atracción gravitacional del Sol apunta hacia el Sol y tiene una magnitud $\frac{GmM}{\|r\|^2}$ ().
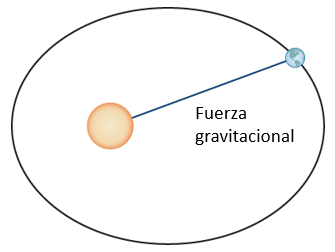
Al establecer estas dos fuerzas iguales entre sí, y utilizando el hecho de que $\bold{a}(t) = \bold{v'}(t)$, obtenemos
$$m\bold{v'}(t) = -\frac{GmM}{\|r\|^2} ⋅ \frac{r}{\|r\|}$$que puede reescribirse como
$$\frac{d\bold{v}}{dt} = -\frac{GmM}{\|r\|^3}\bold{r}$$Esta ecuación muestra que los vectores $\frac{d\bold{v}}{dt}$ y $\bold{r}$ son paralelos entre sí, por lo que $\frac{d\bold{v}}{dt}×\bold{r} = 0$. A continuación, diferenciemos $\bold{r}×\bold{v}$ con respecto al tiempo:
$$\frac{d}{dt}\bold{r}×\bold{v} = \frac{d\bold{r}}{dt}×\bold{v} + \bold{r}×\frac{d\bold{v}}{dt} = \bold{v}×\bold{v} = 0$$Esto demuestra que $\bold{r}×\bold{v}$ es un vector constante, que llamamos $\bold{C}$. Dado que $\bold{r}$ y $\bold{v}$ son perpendiculares a $\bold{C}$ para todos los valores de $t$, deben estar en un plano perpendicular a $\bold{C}$. Por lo tanto, el movimiento del planeta se encuentra en un plano.
A continuación calculamos la expresión $d\bold{v}/dt×\bold{C}$:
$$\frac{d\bold{v}}{dt}×\bold{C} = -\frac{GmM}{\|r\|^3}\bold{r}× (\bold{r}×\bold{v}) = -\frac{GmM}{\|r\|^3}[(\bold{r} ⋅ \bold{v})\bold{r}-(\bold{r} ⋅ \bold{r})\bold{v}]\tag{$3.26$}$$Esto demuestra que $\bold{r}×\bold{v}$ es un vector constante, que llamamos $\bold{C}$. Dado que $\bold{r}$ y $\bold{v}$ son perpendiculares a $\bold{C}$ para todos los valores de $t$, deben estar en un plano perpendicular a $\bold{C}$. Por lo tanto, el movimiento del planeta se encuentra en un plano.
A continuación calculamos la expresión $d\bold{v}/ dt× \bold{C}$:
$$\frac{d}{dt}(\bold{r} ⋅ \bold{r}) = \frac{d\bold{r}}{dt} ⋅ \bold{r} + \bold{r} ⋅ \frac{d\bold{r}}{dt} = 2\bold{r} ⋅ \frac{d\bold{r}}{dt} = 2\bold{r} ⋅ \bold{v} \tag{$3.27$}$$Como $\bold{r} ⋅ \bold{r} = \|\bold{r}\|^2$, también tenemos
Combinando las ecuaciones 3.27 y 3.28, obtenemos
$$\begin{aligned} 2\bold{r} ⋅ \bold{v} &= 2\|\bold{r}\|\frac{d}{dt}\|\bold{r}\|\\ \bold{r} ⋅ \bold{v} &= \|\bold{r}\|\frac{d}{dt}\|\bold{r}\| \end{aligned}$$Sustituyendo lo anterior en la ecuación 3.26 nos da
$$\begin{aligned} \frac{d\bold{v}}{dt} ×\bold{C} &= -\frac{GM}{\|\bold{r}\|^3}[(\bold{r} ⋅ \bold{v})\bold{r} - (\bold{r} ⋅ \bold{r})\bold{v}]\\ &= -\frac{GM}{\|\bold{r}\|^3}\bigg[\|\bold{r}\|(\frac{d}{dt}\|\bold{r}\|)\bold{r} - \|\bold{r}\|^2\bold{v}\bigg]\\ &= -GM\bigg[\frac{1}{\|\bold{r}\|^2}(\frac{d}{dt}\|\bold{r}\|)\bold{r} - \frac{1}{\|\bold{r}\|}\bold{v}\bigg]\\ &= GM\bigg[\frac{\bold{v}}{\|\bold{r}\|} - \frac{r}{\|\bold{r}\|^2}(\frac{d}{dt}\|\bold{r}\|) \bigg] \end{aligned}\tag{$3.29$}$$Sin embargo,
$$\begin{aligned} \frac{d}{dt}\frac{\bold{r}}{\|\bold{r}\|} &= \frac{\frac{d}{dt}(\bold{r})\|\bold{r}\| - \bold{r}\frac{d}{dt}\|\bold{r}\|}{\|\bold{r}\|^2}\\ &= \frac{\frac{d\bold{r}}{dt}}{\|\bold{r}\|} - \frac{\bold{r}}{\|\bold{r}\|^2}\frac{d}{dt}\|\bold{r}\|\\ &= \frac{\bold{v}}{\|\bold{r}\|} - \frac{\bold{r}}{\|\bold{r}\|^2}\frac{d}{dt}\|\bold{r}\| \end{aligned}$$Por lo tanto, la ecuación 3.29 se convierte en
$$\frac{d\bold{v}}{dt}×\bold{C} = GM\bigg(\frac{d}{dt}\frac{\bold{r}}{\|\bold{r}\|}\bigg)$$Como $\bold{C}$ es un vector constante, podemos integrar ambos lados y obtener
$$\bold{v}×\bold{C} = GM\frac{\bold{r}}{\|\bold{r}\|} + \bold{D},$$donde $\bold{D}$ es un vector constante. Nuestro objetivo es resolver para $|\bold{r}\|$. Comencemos calculando $\bold{r} ⋅ (\bold{v}×\bold{C})$:
$$\begin{aligned} \bold{r} ⋅ (\bold{v}×\bold{C}) &= \bold{r} ⋅ \bigg(GM\frac{\|\bold{r}\|^2}{\|\bold{r}\|}+\bold{D}\bigg)\\ &= GM\frac{\|\bold{r}\|^2}{\|\bold{r}\|} + \bold{r} ⋅ \bold{D} = GM\|\bold{r}\|+\bold{r} ⋅ \bold{D} \end{aligned}$$Sin embargo, $\bold{r} ⋅ (\bold{v}×\bold{C}) = (\bold{r}×\bold{v}) ⋅ \bold{C}$, entonces
$$\bold{r} ⋅ (\bold{v}×\bold{C}) = GM\|\bold{r}\|+\bold{r} ⋅ \bold{D}$$Como $\bold{r}×\bold{v} = \bold{C}$, tenemos
$$\|\bold{C}\|^2 = GM\|\bold{r}\|+\bold{r} ⋅ \bold{D}$$Observa que $\bold{r} ⋅ \bold{D} = \|\bold{r}\|\|\bold{D}\|cosθ$, donde $θ$ es el ángulo entre $\bold{r}$ y $\bold{D}$. Por lo tanto,
$$\|\bold{C}\|^2 = GM\|\bold{r}\|+\|\bold{r}\|\|\bold{D}\|cosθ$$Resolviendo para $\|\bold{r}\|$
$$\|\bold{r}\|= \frac{\|\bold{C}\|^2}{GM+\|\bold{D}\|cosθ} = \frac{\|\bold{C}\|^2}{GM}\bigg(\frac{1}{1+ecosθ}\bigg),$$donde $e = \|\bold{D}\|/GM$. Esta es la ecuación polar de una cónica con un foco en el origen, que configuramos para ser el Sol. Es una hipérbola si $e\gt 1$, una parábola si $e = 1$, o una elipse si $e \lt 1$. Como los planetas tienen órbitas cerradas, la única posibilidad es una elipse. Sin embargo, en este punto debe mencionarse que los cometas hiperbólicos existen. Estos son objetos que simplemente pasan a través del sistema solar a velocidades demasiado grandes para quedar atrapados en una órbita alrededor del Sol. A medida que pasan lo suficientemente cerca del Sol, el campo gravitacional del Sol desvía la trayectoria lo suficiente como para que el camino se vuelva hiperbólico.
Uso de la tercera ley de Kepler para órbitas no heliocéntricas
La tercera ley de Kepler del movimiento planetario puede modificarse para el caso de un objeto en órbita alrededor de un objeto que no sea el Sol, como la Luna alrededor de la Tierra. En este caso, la tercera ley de Kepler se convierte en
$$P^2 = \frac{4π^2a^3}{G(m+M)}\tag{$3.30$}$$donde $m$ es la masa de la Luna y $M$ es la masa de la Tierra, $a$ representa la longitud del eje mayor de la órbita elíptica y $P$ representa el período.
Dado que la masa de la Luna es $7.35 × 10^{22}\;kg$, la masa de la Tierra es $5.97× 10^{24}\;kg, G = 6.67 × 10^{-11}\;m^3/kg ⋅ seg^2$, y el período de la luna es $27.3$ días, encontremos la longitud del Eje mayor de la órbita de la Luna alrededor de la Tierra.
La siguiente escena interactiva hace parte de la unidad didáctica El Sistema planetario: Trayectorias elípticas. Primera ley de Kepler, del proyecto Un100, diseñada por José Luis Abreu. En esta escena se muestra una órbita elíptica en el espacio 3D y los parámetros keperianos que la definen, los cuales puedes modificar y observar cómo se modifica la órbita.
Si haces clic sobre uno de los parámetros (en el nombre), aparecerá una descripción del mismo. En este enlace puedes explorar otra unidad didáctica con la segunda Ley de Kepler.
Introducción del capítulo: el cometa Halley
Ahora volvemos al primer apartado, que analiza el movimiento del cometa Halley alrededor del Sol. La primera ley de Kepler establece que el cometa Halley sigue un camino elíptico alrededor del Sol, con el Sol como foco de la elipse. El período del cometa Halley es de aproximadamente $76,1$ años, dependiendo de qué tan cerca pase de Júpiter y Saturno a medida que pasa a través del sistema solar exterior. Usemos $T = 76.1$ años. ¿Cuál es la distancia promedio del cometa Halley del Sol?
Terminamos este capítulo, con el siguiente proyecto estudiantil.
¿Qué tan rápido puede viajar un auto de carrera a través de un giro circular sin derrapar y golpear la pared? La respuesta podría depender de varios factores:
En este proyecto investigamos esta pregunta para los autos de las carreras NASCAR en el Bristol Motor Speedway en Tennessee. Antes de considerar esta pista en particular, usamos funciones con valores vectoriales para desarrollar las matemáticas y la física necesarias para responder preguntas como esta.
Un carro de masa $m$ se mueve con velocidad angular constante $ω$ alrededor de una curva circular de radio $R$ (). La curva está inclinada en un ángulo $θ$. Si la altura del automóvil desde el suelo es $h$, entonces la posición del automóvil en el tiempo $t$ viene dada por la función $\bold{r}(t) = ⟨Rcos(ω t), Rsen (ω t), h⟩$.
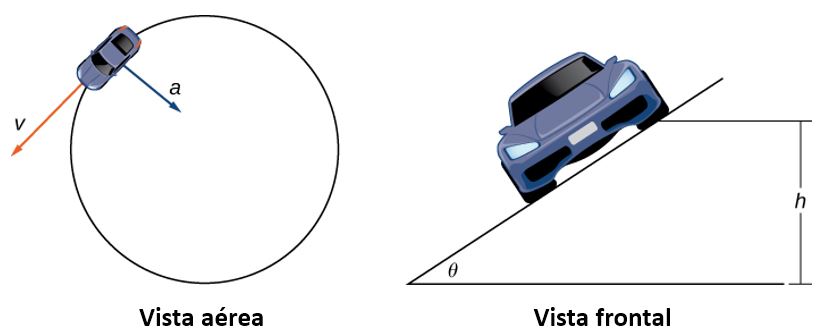
Supongamos que $v_{max}$ denota la velocidad máxima que el automóvil puede alcanzar a través de la curva sin derrapar. En otras palabras, $v_{max}$ es la velocidad más rápida a la que el automóvil puede rodar en la curva. Cuando el automóvil viaja a esta velocidad, la magnitud de la fuerza centrípeta es
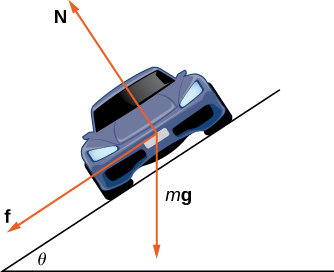
Concluye que
$$|\bold{F_{cent}}|=\frac{sen θ +\mu cosθ}{cosθ -\mu senθ}mg$$Ahora que tenemos una fórmula que relaciona la velocidad máxima del automóvil y el ángulo de inclinación, estamos en condiciones de responder las preguntas como la que se planteó al comienzo del proyecto.
El Bristol Motor Speedway es una pista corta de NASCAR en Bristol, Tennessee. La pista tiene la forma aproximada que se muestra en la . Cada extremo de la pista es aproximadamente semicircular, por lo que cuando los automóviles hacen giros, viajan a lo largo de una curva aproximadamente circular. Si un automóvil toma la pista interior y acelera a lo largo de la parte inferior de la curva 1, el automóvil viaja a lo largo de un semicírculo de radio de aproximadamente $211$ pies con un ángulo de inclinación de $24°$. Si el automóvil decide tomar la pista exterior y acelera a lo largo de la parte superior de la curva 1, entonces el automóvil viaja a lo largo de un semicírculo con un ángulo de inclinación de $28°$ (La pista tiene una banca de ángulo variable).

El coeficiente de fricción para un neumático normal en condiciones secas es aproximadamente $0.7$. Por lo tanto, suponemos que el coeficiente para un neumático NASCAR en condiciones secas es de aproximadamente $0,98$.
Antes de responder las siguientes preguntas, ten en cuenta que es más fácil hacer cálculos en términos de pies y segundos, y luego convertir las respuestas a millas por hora como paso final.
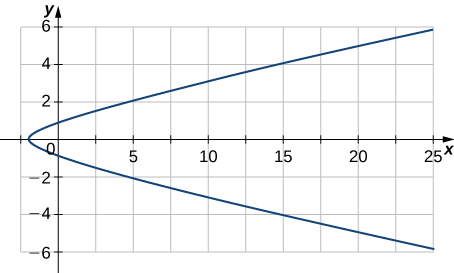
Dadas las siguientes funciones de posición, encuentra la velocidad, aceleración y rapidez en términos del parámetro $t$.

Encuentra la velocidad, aceleración y rapidez de una partícula con la función de posición dada.

Considera el movimiento de un punto en la circunferencia de un círculo rodante. A medida que el círculo rueda, genera el cicloide $\bold{r}(t) = (ω t - sen (ω t))\bold{i} + (1 - cos (ω t))\bold{j}$, donde $ω$ es la velocidad angular del círculo:

Un ala delta está en espiral hacia arriba como resultado del aire que sube rápidamente en una trayectoria que tiene el vector de posición $\bold{r}(t) = (3cost)\bold{i} + (3sent)\bold{j} + t^2\bold{k}$. La ruta es similar a la de una hélice, aunque no es una hélice. El gráfico se muestra aquí:

Encuentra las siguientes cantidades:
Dado que $\bold{r}(t) = ⟨e^{-5t}sent, e^{-5t}cost, 4e^{-5t}⟩$ es el vector de posición de una partícula en movimiento, encuentra las siguientes cantidades:
Se dispara un proyectil en el aire desde el nivel del suelo con una velocidad inicial de $500\; m/seg$ en un ángulo de $60°$ con la horizontal. El gráfico se muestra aquí:
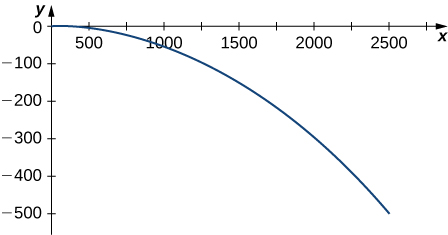
Se dispara un proyectil a una altura de $1.5\; m$ sobre el suelo con una velocidad inicial de $100\; m/seg$ y en un ángulo de $30°$ sobre la horizontal. Usa esta información para responder las siguientes preguntas:
Para cada uno de los siguientes problemas, encuentra los componentes tangencial y normal de la aceleración.

Supón que la función de posición para un objeto en tres dimensiones viene dada por la ecuación $\bold{r}(t) = tcos(t)\bold{i} + tsen (t)\bold{j} + 3t\bold{k}$.

En las aplicaciones de las derivadas, estudiaste cómo determinar el máximo y el mínimo de una función de una variable durante un intervalo cerrado. Esta función puede representar la temperatura durante un intervalo de tiempo determinado, la posición de un automóvil en función del tiempo o la altitud de un avión a reacción mientras viaja de Medellín a Madrid.
En cada uno de estos ejemplos, la función tiene una variable independiente.
Supongamos, sin embargo, que tenemos una cantidad que depende de más de una variable. Por ejemplo, la temperatura puede depender de la ubicación y la hora del día, o el modelo de ganancias de una empresa puede depender de la cantidad de unidades vendidas y la cantidad de dinero gastado en publicidad.
Cuando se trata de una función de más de una variable independiente, surgen naturalmente varias preguntas. Por ejemplo, ¿cómo calculamos los límites de las funciones de más de una variable? La definición de derivada que usamos antes implicaba un límite. ¿La nueva definición de derivada también implica límites? ¿Se aplican las reglas de diferenciación en este contexto? ¿Podemos encontrar extremos relativos de funciones usando derivadas? Todas estas preguntas se responden en este capítulo.
Nuestro primer paso es explicar qué es una función de más de una variable, comenzando con las funciones de dos variables independientes. Este paso incluye identificar el dominio y el rango de tales funciones y aprender a graficarlas. También examinaremos formas de relacionar las gráficas de funciones en tres dimensiones con gráficas de funciones planas más familiares.
La definición de una función de dos variables es muy similar a la definición de una función de una variable.
La principal diferencia es que, en lugar de asignar valores de una variable a valores de otra variable, asignamos pares de variables ordenadas a otra variable.
Una función de dos variables $z = f(x,y)$ asigna cada par ordenado $(x,y)$ en un subconjunto $D$ del plano real $ℝ^2$ a un número real único $z$. El conjunto $D$ se llama dominio de la función. El rango de $f$ es el conjunto de todos los números reales $z$ que tienen al menos un par ordenado $(x,y)∈ D$ tal que $f (x,y) = z$ como se muestra en la siguiente figura.

Determinar el dominio de una función de dos variables implica tener en cuenta las restricciones de dominio que puedan existir. Vamos a ver.
Dominios y rangos para funciones de dos variables
Encuentra el dominio y el rango de cada una de las siguientes funciones:
Supongamos que deseamos graficar la función $z = (x,y)$. Esta función tiene dos variables independientes ($x$ e $y$) y una variable dependiente ($z$). Cuando graficamos una función $y = f(x)$ de una variable, usamos el plano cartesiano. Podemos graficar cualquier par ordenado $(x,y)$ en el plano, y cada punto en el plano tiene un par ordenado $(x,y)$ asociado. Con una función de dos variables, cada par ordenado $(x,y)$ en el dominio de la función se asigna a un número real $z$. Por lo tanto, la gráfica de la función $f$ consiste en triples ordenados $(x, y, z)$. La gráfica de una función $z = (x,y)$ de dos variables se llama superficie.
Para comprender completamente el concepto de trazar un conjunto de triples ordenados para obtener una superficie en un espacio tridimensional, imagina el sistema de coordenadas $(x,y)$ tendido en plano.
Entonces, cada punto en el dominio de la función $f$ tiene un valor $z$ único asociado con él. Si $z$ es positivo, entonces el punto graficado está ubicado sobre el plano $xy$, si $z$ es negativo, entonces el punto graficado está ubicado debajo del plano $xy$. El conjunto de todos los puntos graficados se convierte en la superficie bidimensional que es el gráfico de la función $f$.
Gráficas de funciones de dos variables
Crea un gráfico de cada una de las siguientes funciones:
En la siguiente página, presentamos dos escenas interactivas que muestran las dos gráficas del ejercicio anterior. En la primera escena, puedes modificar el valor del radio del hemisferio. La escena del paraboloide es tomada del libro Curvas y superficies paramétricas, de Navarro y Rivera (2018), en la cual es posible evidenciar la revolución de la superficie, al reducir el valor del parámetro $t$.
Recuerda que con clic izquierdo sostenido puedes rotar la gráfica 3D. Se recomienda ampliar la escena (clic en la esquina superior derecha de la escena).
Tuercas y tornillos
Una función de beneficio para un fabricante de hardware viene dada por
$$f (x,y) = 16- (x - 3)^2- (y - 2)^2,$$
donde $x$ es el número de tuercas vendidas por mes (medido en miles) e $y$ representa el número de tornillos vendidos por mes (medido en miles). La ganancia se mide en miles de dólares. Dibuja un gráfico de esta función.
Si los excursionistas caminan por senderos escarpados, podrían usar un mapa topográfico que muestre cuán abruptamente cambian los senderos. Un mapa topográfico contiene líneas curvas llamadas curvas de nivel. Cada línea de contorno corresponde a los puntos en el mapa que tienen la misma elevación (). Una curva de nivel de una función de dos variables $f (x,y)$ es completamente análoga a una línea de contorno en un mapa topográfico.
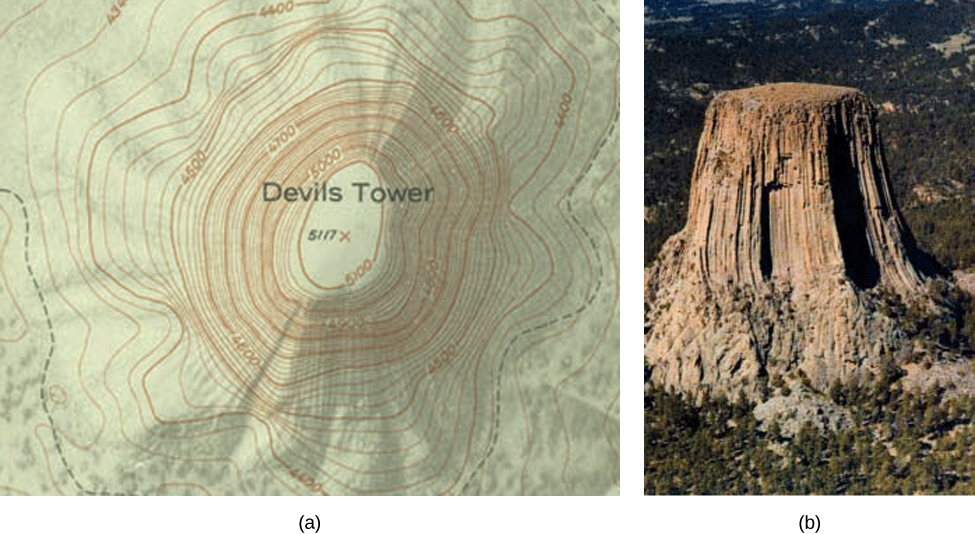
Dada una función $f(x,y)$ y un número $c$ en el rango de $f$, una curva de nivel de una función de dos variables para el valor $c$ se define como el conjunto de puntos que satisfacen la ecuación $\bold{f (x,y)} = C$.
Volviendo a la función $g (x,y) = \sqrt{9 - x^2 - y^2}$, podemos determinar las curvas de nivel de esta función. El rango de $g$ es el intervalo cerrado $[0,3]$. Primero, elegimos cualquier número en este intervalo cerrado, por ejemplo, $c = 2$. La curva de nivel correspondiente a $c = 2$ se describe mediante la ecuación
Para simplificar, eleva al cuadrado ambos lados de esta ecuación:
$$9 - x^2 - y^2 = 4$$ $$x^2 + y^2 = 5$$Esta ecuación describe un círculo centrado en el origen con radio $\sqrt{5}$. El uso de valores de $c$ entre $0$ y $3$ produce otros círculos también centrados en el origen. Si $c = 3$, entonces el círculo tiene radio $0$, por lo que consiste únicamente en el origen. La es un gráfico de las curvas de nivel de esta función correspondientes a $c = 0,1,2 y 3$. Observa que en la derivación anterior puede ser posible que hayamos introducido soluciones adicionales al cuadrar ambos lados. Este no es el caso aquí porque el rango de la función de raíz cuadrada no es negativo.

Un gráfico de las diversas curvas de nivel de una función se denomina mapa de contorno.
Hacer un mapa de contorno
Dada la función $f (x,y) = \sqrt{8 + 8x - 4y - 4x^2 - y^2}$, encuentra la curva de nivel correspondiente a $c = 0$. Luego crea un mapa de contorno para esta función. ¿Cuáles son el dominio y el rango de $f$
Otra herramienta útil para comprender el gráfico de una función de dos variables se llama traza vertical. Las curvas de nivel siempre se grafican en el plano $xy$, pero como su nombre lo indica, las trazas verticales se grafican en los planos $xz$ o $yz$.
Considere una función $z = f(x,y)$ con el dominio $D⊆ ℝ^2$. Una traza vertical de la función puede ser el conjunto de puntos que resuelve la ecuación $f (a, y) = z$ para una constante dada $x = a$ o $f (x, b) = z $para una constante dada $y = b$.
Encontrar trazas verticales
Encuentra las trazas verticales para la función$ f(x,y) = senxcosy$ correspondiente a $x = -\frac{π}{4},0,$ y $\frac{π}{4}$, e $y = -\frac{π}{4},0,$ y $\frac{π}{4}$.
Las funciones de dos variables pueden producir algunas superficies de aspecto llamativo. La siguiente figura muestra dos ejemplos.

Puedes interactuar con la siguiente escena interactiva, diseñada por Dr. Doug Davis en GeoGebra, en la que presentamos, inicialmente, la función $f(x,y) = senxcosy$
Puedes cambiar la función en el cuadro de texto. Observa que aparece información adicional, que aún no hemos trabajado; no obstante, puedes explorar las trazas para diferentes valores de $x = a$ e $y = b$, además del mapa de contorno. Practica con las funciones de la .
Lo más común son las funciones de dos variables; no obstante, demos una mirada a funciones como:
$$f(x,y,z)=x^2-2xy+y^2+3yz-z^2+4x-2y+3x-6\\ \text{(una función polinomial de tres variables)}$$y
$$g(x,y,t)=(x^2-4xy+y^2)sent-(3x+5y)cost.$$En la primera función, $(x, y, z)$ representa un punto en el espacio, y la función $f$ asigna cada punto en el espacio a una cuarta cantidad, como la temperatura o la velocidad del viento. En la segunda función, $(x,y)$ puede representar un punto en el plano, y $t$ puede representar el tiempo. La función podría asignar un punto en el plano a una tercera cantidad (por ejemplo, presión) en un momento dado $t$. El método para encontrar el dominio de una función de más de dos variables es análogo al método para funciones de una o dos variables.
Dominio para funciones de tres variables
Encuentra el dominio de cada una de las siguientes funciones:
Las funciones de dos variables tienen curvas de nivel, que se muestran como curvas en el plano $xy$. Sin embargo, cuando la función tiene tres variables, las curvas se convierten en superficies, por lo que podemos definir superficies de nivel para funciones de tres variables.
Dada una función $f (x, y, z)$ y un número $c$ en el rango de $f$, una superficie de nivel de una función de tres variables se define como el conjunto de puntos que satisfacen la ecuación $f (x, y, z) = C$.
Encontrar una superficie de nivel
Encuentre la superficie de nivel para la función $f (x, y, z) = 4x^2 + 9y^2 - z^2$ correspondiente a $c = 1$.
La siguiente escena interactiva del hiperboloide es tomada del libro Curvas y superficies paramétricas, de Navarro y Rivera (2018), en la cual puedes variar algunos parámetros, entre ellos, el valor de $c$.
Para los siguientes ejercicios, evalúa cada función en los valores indicados.
Para los siguientes ejercicios, encuentra el dominio de la función.
Para los siguientes ejercicios, encuentra el rango.
Para los siguientes ejercicios, encuentra las curvas de nivel de cada función en el valor indicado de $c$ para visualizar la función dada.
Para los siguientes ejercicios, encuentra las trazas verticales de las funciones en los valores indicados de $x$ e $y$, y dibuja las trazas.
Encuentra el dominio de las siguientes funciones.
Para los siguientes ejercicios, traza una gráfica de la función.
Dibuja lo siguiente encontrando las curvas de nivel. Verifica el gráfico usando tecnología.
Encuentra la superficie de nivel para las funciones de tres variables y descríbela.
Para los siguientes ejercicios, encuentra una ecuación de la curva de nivel de $f$ que contenga el punto $P$.
Ahora hemos examinado funciones de más de una variable y hemos visto cómo representarlas gráficamente. En esta sección, veremos cómo tomar el límite de una función de más de una variable y lo que significa que una función de más de una variable sea continua en un punto de su dominio. Resulta que estos conceptos tienen aspectos que simplemente no ocurren con funciones de una variable.
Recuerda la definición de un límite de una función de una variable:
Sea $f(x)$ definida para todo $x ≠ a$ en un intervalo abierto que contenga a. Sea L un número real. Luego
$$\lim\limits_{x \to a} f(x)=L$$si para cada $ϵ \gt 0$, existe un $δ\gt 0$, de modo que si $0 \lt| x - a | \lt δ$ para todo $x$ en el dominio de $f$, entonces
$$|f(x)-L|\lt ϵ$$Antes de que podamos adaptar esta definición para definir un límite de una función de dos variables, primero debemos ver cómo extender la idea de un intervalo abierto en una variable a un intervalo abierto en dos variables.
Considera un punto $(a, b)∈ ℝ^2$. Un disco $δ$ centrado en el punto $(a, b)$ se define como un disco abierto de radio $δ$ centrado en el punto $(a, b)$, es decir,
$$\{(x,y) ∈ ℝ^2| (x - a)^2+ (y - b)^2 \ltδ^2\}$$como se muestra en el siguiente gráfico.

La idea de un disco $δ$ aparece en la definición del límite de una función de dos variables.
Si $δ$ es pequeño, entonces todos los puntos $(x,y)$ en el disco $δ$ están cerca de $(a, b)$.
Esto es completamente análogo a que $x$ esté cerca de $a$ en la definición de un límite de una función de una variable. En una dimensión, expresamos esta restricción como
$$a-δ\lt x \lt a+δ$$En más de una dimensión, usamos un disco $δ$.
Sea $f$ una función de dos variables, $x$ e $y$. El límite de $f (x,y)$ a medida que $(x,y)$ se acerca a $(a, b)$ es $L$, escrito
$$\lim\limits_{(x,y) \to (a, b)} f(x,y) = L$$si para cada $ϵ\gt 0$ existe un suficientemente pequeño $δ\gt 0$ tal que para todos los puntos $(x,y)$ en un disco $δ$ alrededor de $(a, b)$, excepto posiblemente para $(a, b)$, el valor de $f ( x, y)$ no está a más de $ϵ$ de $L$ (). Matemáticamente lo podríamos escribir diciendo que para cualquier $ϵ\gt 0$, existe un número $δ\gt 0$ tal que
$$| f(x,y) -L | \lt ϵ\;\text{siempre que}\; 0 \lt \sqrt{( x - a)^2+ (y - b)^2} \ltδ$$Probar que existe un límite usando la definición de un límite de una función de dos variables puede ser un desafío. En su lugar, usamos el siguiente teorema, que nos da atajos para encontrar límites.

Leyes de los límites para funciones de dos variables
Sean $f (x,y)$ y $g (x,y)$ definidas para todos los $(x,y) ≠ (a, b)$ en una vecindad alrededor de $(a, b)$. Supón que $L$ y $M$ son números reales tales que $\lim\limits_{(x,y) \to (a, b)} f(x,y) = L$ y $\lim\limits_{(x,y) \to (a, b)} g (x,y) = M$, y sea $c$ una constante. Entonces cada una de las siguientes afirmaciones es válida:
Ley de la constante:
$$\lim\limits_{(x,y) \to (a, b)} c =c\tag{$4.2$}$$Leyes de identidad:
$$\lim\limits_{(x,y) \to (a, b)} x = a\tag{$4.3$}$$ $$\lim\limits_{(x,y) \to (a, b)} y=b\tag{$4.4$}$$Ley de la suma:
$$\lim\limits_{(x,y) \to (a, b)} (f(x,y)+g(x,y))=L+M\tag{$4.5$}$$Ley de la diferencia:
$$\lim\limits_{(x,y) \to (a, b)} (f(x,y)-g(x,y))=L-M\tag{$4.6$}$$Ley de la múltiple constante:
$$\lim\limits_{(x,y) \to (a, b)} (f(x,y)-g(x,y)) (cf(x,y))=cL\tag{$4.7$}$$Ley del producto:
$$\lim\limits_{(x,y) \to (a, b)}(f(x,y)g(x,y))=LM\tag{$4.8$}$$Ley del cociente:
$$\lim\limits_{(x,y) \to (a, b)}\frac{f(x,y)}{g(x,y)} =\frac{L}{M}\;\text{para}\;M≠0\tag{$4.9$}$$Ley de la potencia:
para todo $n$ entero positivo
Ley de la raíz:
$$\lim\limits_{(x,y) \to (a, b)}\sqrt[n]{f(x,y)}=\sqrt[n]{L}\tag{$4.11$}$$todo $L$ si $n$ es impar y positivo, y $L\ge 0$ si $n$ es par y positivo.
Las pruebas de estas propiedades son similares a las de los límites de las funciones de una variable.
Encontrar el límite de una función de dos variables
Encuentra cada uno de los siguientes límites:
Dado que estamos tomando el límite de una función de dos variables, el punto $(a, b)$ está en $ℝ^2$, y es posible acercarse a este punto desde un número infinito de direcciones. A veces, al calcular un límite, la respuesta varía según el camino que se tome hacia $(a, b)$. Si este es el caso, entonces el límite no existe. En otras palabras, el límite debe ser único, independientemente de la ruta tomada.
Límites que no existen
Demuestra que ninguno de los siguientes límites existe:
La función de la primera parte del ejercicio la hemos representado en la escena interactiva de la siguiente página. Rota la escena para que verifiques lo enunciado en la solución; por ejemplo, para $y=0$ (eje $x$) observa que la función permanece fija en cero.
Para estudiar la continuidad y la diferenciabilidad de una función de dos o más variables, primero necesitamos aprender alguna nueva terminología.
Sea $S$ un subconjunto de $ℝ^2$ ().
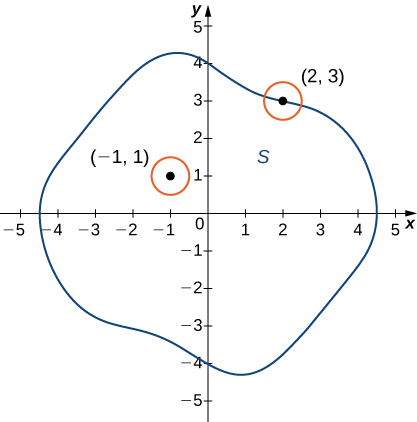
Un ejemplo de un conjunto abierto es un disco $δ$. Si incluimos el límite del disco, se convierte en un conjunto cerrado. Un conjunto que contiene algunos, pero no todos, sus puntos de frontera no está abierto ni cerrado. Por ejemplo, si incluimos la mitad del límite de un disco $δ$ pero no la otra mitad, entonces el conjunto no está abierto ni cerrado.
Sea $S$ un subconjunto de $ℝ^2$ ().
La definición de un límite de una función de dos variables requiere que el disco $δ$ esté contenido dentro del dominio de la función. Sin embargo, si deseamos encontrar el límite de una función en un punto límite del dominio, el disco $δ$ no está contenido dentro del dominio. Por definición, algunos de los puntos del disco $δ$ están dentro del dominio y otros están fuera. Por lo tanto, solo necesitamos considerar los puntos que están dentro del disco $δ$ y el dominio de la función. Esto lleva a la definición del límite de una función en un punto de frontera.
Sea $f$ una función de dos variables, $x$ e $y$, y supón que $(a, b)$ está en la frontera del dominio de $f$. Entonces, el límite de $f (x,y)$ a medida que $(x,y)$ se acerca $(a, b)$ es $L$, escrito así:
$$\lim\limits_{(x,y) \to (a,b)}f(x,y)=L$$si para cualquier $ϵ\gt 0$, existe un número $δ\gt 0$ tal que para cualquier punto $(x,y)$ dentro del dominio de $f$ y dentro de una distancia adecuadamente pequeña positiva $δ$ de $(a, b)$, el valor de $f (x , y)$ no está a más de un $ϵ$ de $L$ (). Usando símbolos, podemos escribir: Para cualquier $ϵ\gt 0$, existe un número $δ\gt 0$ tal que
$$|f(x,y)-L|\ltϵ\;\text{siempre que }\; 0\lt \sqrt{(x-a)^2+(y-b)^2}\ltδ$$
Límite de una función en un punto de frontera
Demuestra que $\lim\limits_{(x,y) \to (4,3)}\sqrt{25-x^2-y^2}=0$
Observa la siguiente escena interactiva, que muestra la función del ejercicio y el punto $(4,3)$ en la frontera.
Hemos definido la continuidad de una función de una variable basada en el límite de una función de una variable. En particular, son necesarias tres condiciones para que $f (x)$ sea continua en el punto $x = a$:
Estas tres condiciones son también necesarias para la continuidad de una función de dos variables.
Una función $f (x,y)$ es continua en un punto $(a, b)$ en su dominio si se cumplen las siguientes condiciones:
Demostrando la continuidad para una función de dos variables
Demuestra que la función $f (x,y) = \sqrt{3x + 2y}{x + y + 1}$ es continua en el punto $(5, -3)$.
La continuidad de una función de cualquier número de variables también se puede definir en términos de delta y épsilon. Una función de dos variables es continua en un punto $(x_0, y_0)$ en su dominio si para cada $ϵ\gt 0$ existe un $δ\gt 0$ tal que, siempre que $\sqrt{(x - x_0)^2+ (y - y_0)^2} \lt δ$ es cierto, $| f(x,y) -f (a, b) | \ltϵ$.
Esta definición se puede combinar con la definición formal (es decir, la definición épsilon-delta) de continuidad de una función de una variable para probar los siguientes teoremas:
La suma de las funciones continuas es continua Si $f (x,y)$ es continua en $(x_0, y_0)$, y $g (x,y)$ es continua en $(x_0, y_0)$, entonces $f (x,y) + g (x,y)$ es continua en $(x_0, y_0)$.
El producto de las funciones continuas es continuo Si $g (x)$ es continua en $x_0$ y $h (y)$ es continua en $y_0$, entonces $f (x,y) = g (x) h (y)$ es continua en $(x_0, y_0)$.
La composición de las funciones continuas es continua Sea $g$ una función de dos variables desde un dominio $D⊆ℝ^2$ a un rango $R⊆ℝ$. Supón que $g$ es continuo en algún punto $(x_0, y_0)∈ D$ y define $z_0 = g (x_0, y_0)$. Supongamos que $f$ es una función que asigna $ℝ$ a $ℝ$ de modo que $z_0$ está en el dominio de $f$. Por último, supón que $f$ es continua en $z_0$. Entonces $f ∘ g$ es continuo en $(x_0, y_0)$ como se muestra en la siguiente figura.
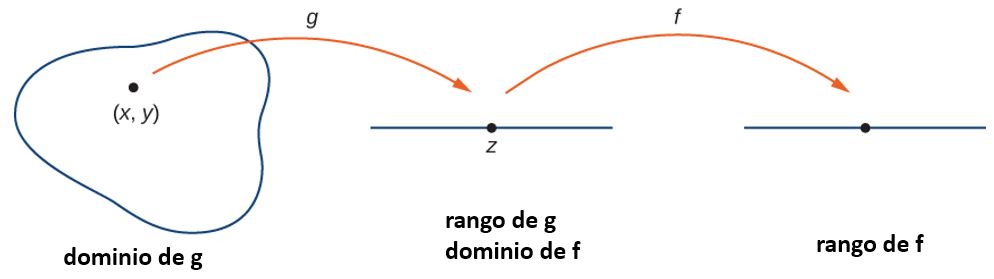
Ahora usemos los teoremas anteriores para mostrar la continuidad de las funciones en los siguientes ejercicios.
Más ejercicios de continuidad de una función de dos variables
Demuestra que las funciones $f (x,y) = 4x^3y^2$ y $g (x,y) = cos (4x^3y^2)$ son continuas en todas partes.
El límite de una función de tres o más variables ocurre fácilmente en las aplicaciones. Por ejemplo, supongamos que tenemos una función $f (x, y, z)$ que da la temperatura en una ubicación física $(x, y, z)$ en tres dimensiones. O tal vez una función $g (x, y, z, t)$ puede indicar la presión del aire en una ubicación $(x, y, z)$ en el tiempo $t$. ¿Cómo podemos tomar un límite en un punto en $ℝ^3$? ¿Qué significa ser continuo en un punto en cuatro dimensiones?
Las respuestas a estas preguntas se basan en extender el concepto de un disco $δ$ en más de dos dimensiones. Entonces, las ideas del límite de una función de tres o más variables y la continuidad de una función de tres o más variables son muy similares a las definiciones dadas anteriormente para una función de dos variables.
Sea $(x_0, y_0, z_0)$ un punto en $ℝ^3$. Entonces, una bola $δ$ en tres dimensiones consiste en todos los puntos en $ℝ^3$ que se encuentran a una distancia de menos de $δ$ desde $(x_0, y_0, z_0)$, es decir,
$$\bigg\{(x,y,z)∈ℝ^3 |\sqrt{(x-x_0)^2+(y-y_0)^2+(z-z_0)^2}\ltδ\bigg\}$$Para definir una bola $δ$ en dimensiones superiores, agrega términos adicionales debajo del radical para corresponder a cada dimensión adicional. Por ejemplo, dado un punto $P = (w_0, x_0, y_0, z_0)$ en $ℝ^4$, una bola $δ$ alrededor de $P$ puede describirse por
$$\bigg\{(w,x,y,z)∈ℝ^4 |\sqrt{(w-w_0)^2+(x-x_0)^2+(y-y_0)^2+(z-z_0)^2}\ltδ\bigg\}$$Para mostrar que existe un límite de una función de tres variables en un punto $(x_0, y_0, z_0)$, es suficiente mostrar que para cualquier punto en una bola $δ$ centrada en $(x_0, y_0, z_0)$, el valor de la función en ese punto está arbitrariamente cerca de un valor fijo (el valor límite). Todas las leyes de límites para funciones de dos variables también se aplican a funciones de más de dos variables.
Encontrar el límite de una función de tres variables
Encuentra $\lim\limits_{(x,y,z)\to (4,1,-3)}\frac{x^2y-3z}{2x+5y-z}$
Para los siguientes ejercicios, encuentre el límite de la función.
Para los siguientes ejercicios, evalúa los límites en los valores indicados de $x$ y $y$. Si el límite no existe, indícalo y explica por qué el límite no existe.
Para los siguientes ejercicios, completa la declaración.
Para los siguientes ejercicios, usa técnicas algebraicas para evaluar el límite.
Para los siguientes ejercicios, evalúa los límites de las funciones de tres variables.
Para los siguientes ejercicios, evalúa el límite de la función determinando el valor al que se acerca la función a lo largo de las rutas indicadas. Si el límite no existe, explica por qué no.
Discute la continuidad de las siguientes funciones. Encuentra la región más grande en el plano $xy$ en el que las siguientes funciones son continuas.
Para los siguientes ejercicios, determina la región en la que la función es continua. Explica tu respuesta.
(Sugerencia: demuestra que la función se aproxima a diferentes valores a lo largo de dos rutas diferentes) (Solución).
Ahora que hemos examinado los límites y la continuidad de las funciones de dos variables, podemos proceder a estudiar las derivadas. Encontrar derivadas de funciones de dos variables es el concepto clave en este capítulo, con tantas aplicaciones en matemáticas, ciencias e ingeniería como la diferenciación de funciones de una sola variable. Sin embargo, ya hemos visto que los límites y la continuidad de las funciones multivariables tienen nuevos problemas y requieren una nueva terminología e ideas para abordarlos. Esto lleva a la diferenciación también.
Al estudiar las derivadas de funciones de una variable, encontramos que una interpretación de la derivada es una tasa de cambio instantánea de $y$ como una función de $x$. La notación de Leibniz para la derivada es $dy / dx$, lo que implica que $y$ es la variable dependiente y $x$ es la variable independiente.
Para una función $z = f(x,y)$ de dos variables, $x$ e $y$ son las variables independientes y $z$ es la variable dependiente. Esto plantea dos preguntas de inmediato: ¿Cómo adaptamos la notación de Leibniz para las funciones de dos variables? Además, ¿qué es una interpretación de la derivada? La respuesta se encuentra en derivadas parciales.
Sea $f (x,y)$ una función de dos variables. Entonces, la derivada parcial de $f$ con respecto a $x$, escrita como $∂ f / ∂ x$, o $f_x$, se define como
$$\frac{∂ f}{∂ x} = \lim\limits_{h \to 0}\frac{f(x+h,y)-f(x,y)}{h}\tag{$4.12$}$$La derivada parcial de $f$ con respecto a $y$, escrita como $∂ f / ∂ y$, o $f_y$, se define como
$$\frac{∂ f}{∂ y} = \lim\limits_{k \to 0}\frac{f(x,y+k)-f(x,y)}{k}\tag{$4.13$}$$Esta definición ya muestra dos diferencias. Primero, la notación cambia, en el sentido de que todavía usamos una versión de la notación de Leibniz, pero la $d$ en la notación original se reemplaza con el símbolo $∂$. (Esta "$d$" redondeada generalmente se llama "parcial", por lo que $∂ f / ∂ x$ se dice que es "parcial de $f$ con respecto a $x$".) Esta es la primera pista de que estamos tratando con derivadas parciales.
En segundo lugar, ahora tenemos dos derivadas diferentes que podemos tomar, ya que hay dos variables independientes diferentes. Dependiendo de la variable que elijamos, podemos obtener diferentes derivadas parciales por completo, y a menudo lo hacemos.
Cálculo de derivadas parciales a partir de la definición
Usa la definición de la derivada parcial como límite para calcular $∂ f / ∂ x$ y $∂ f / ∂ y$ para la función $$f (x,y) = x^2-3xy + 2y^2-4x + 5y - 12$$
La idea a tener en cuenta al calcular derivadas parciales es tratar todas las variables independientes, distintas de la variable con respecto a la cual nos estamos diferenciando, como constantes. Luego procede a diferenciar como con una función de una sola variable. Para ver por qué esto es cierto, primero arregla y y define $g (x) = f(x,y)$ en función de $x$. Luego
$$g'(x) = \lim\limits_{h \to 0}\frac{g (x + h) -g (x)}{h} = \lim\limits_{h \to 0}\frac{f (x + h, y) -f (x,y)}{h} = \frac{∂ f}{∂ x}$$Lo mismo es cierto para calcular la derivada parcial de $f$ con respecto a $y$. Esta vez, arregla $x$ y define $h (y) = f(x,y)$ en función de $y$. Luego
Se aplican todas las reglas de diferenciación que ya conocemos.
¿Cómo podemos interpretar estas derivadas parciales? Recuerda que la gráfica de una función de dos variables es una superficie en $ℝ^3$. Si eliminamos el límite de la definición de la derivada parcial con respecto a $x$, el cociente de diferencia permanece:
$$\frac{f(x+h,y)-f(x,y)h}{h}$$Esto se parece al cociente de la diferencia para la derivada de una función de una variable, excepto por la presencia de la variable $y$. La ilustra una superficie descrita por una función arbitraria $z = f(x,y)$.

En la , el valor de $h$ es positivo. Si graficamos $f (x,y)$ y $f (x + h, y)$ para un punto arbitrario $(x,y)$, entonces la pendiente de la recta secante que pasa por estos dos puntos viene dada por
$$\frac{f (x + h, y) -f (x,y)}{h}$$Esta recta es paralela al eje $x$. Por lo tanto, la pendiente de la recta secante representa una tasa de cambio promedio de la función $f$ a medida que viajamos paralelos al eje $x$. Cuando $h$ se aproxima a cero, la pendiente de la recta secante se aproxima a la pendiente de la recta tangente.
Si elegimos cambiar $y$ en lugar de $x$ por el mismo valor incremental $h$, entonces la recta secante es paralela al eje $y$, al igual que la recta tangente. Por lo tanto, $∂ f /∂ x$ representa la pendiente de la recta tangente que pasa por el punto $(x, y, f(x,y))$ paralela al eje $x$ y $∂ f /∂ y$ representa la pendiente de la recta tangente que pasa a través del punto $(x, y, f(x,y))$ paralelo al eje $y$. Si deseamos encontrar la pendiente de una recta tangente que pasa por el mismo punto en cualquier otra dirección, entonces necesitamos lo que se llama derivadas direccionales, que discutiremos en un próximo apartado.
En la siguiente escena interactiva, diseñada por Tim Brzezinski en GeoGebra, puedes observar e interactuar con una ilustración gráfica de las derivadas parciales.
Amplía la escena para una mejor interacción. En ella puedes cambiar la función; por ejemplo, $f(x,y) = sen(x)cos(y)$ y observar tanto el plano tangente como las rectas tangentes en un punto dado, el cual también puedes modificar.
Ahora volvemos a la idea de los mapas de contorno, que presentamos en Funciones de varias variables. Podemos usar un mapa de contorno para estimar derivadas parciales de una función $g (x,y)$.
Derivadas parciales en un mapa de contorno
Usa un mapa de contorno para estimar $∂ g /∂ x $ en el punto $(\sqrt{5}, 0) $para la función $g (x,y) = \sqrt{9 - x^2 - y^2 }$.
Supongamos que tenemos una función de tres variables, como $w = f(x, y, z)$. Podemos calcular derivadas parciales de $w $ con respecto a cualquiera de las variables independientes, usando las definiciones para funciones de dos variables.
Sea $f (x, y, z)$ una función de tres variables. Entonces, la derivada parcial de $f$ con respecto a $x$, escrita como $∂ f /∂ x$, o $f_x$, se define como
$$\frac{∂ f}{∂ x} = \lim\limits_{h \to 0} \frac{f(x+h,y,z)-f(x,y,z)}{h}\tag{$4.14$}$$La derivada parcial de $f$ con respecto a $y$, escrita como $∂ f /∂ y$, o $f_y$, se define como
$$\frac{∂ f}{∂ y} = \lim\limits_{k \to 0} \frac{f(x,y+k,z)-f(x,y,z)}{h}\tag{$4.15$}$$La derivada parcial de $f$ con respecto a $z$, escrita como $∂ f /∂ z$, o $f_z$, se define como
$$\frac{∂ f}{∂ z} = \lim\limits_{m \to 0} \frac{f(x,y,z+m)-f(x,y,z)}{m}\tag{$4.16$}$$Podemos calcular una derivada parcial de una función de tres variables usando la misma idea que usamos para una función de dos variables.
Por ejemplo, si tenemos una función $f$ de $x, y$, y $z$, y deseamos calcular $∂ f /∂ x$, tratamos las otras dos variables independientes como si fueran constantes, luego las diferenciamos con respecto a $x$.
Cálculo de derivadas parciales para una función de tres variables
Usa la definición de límite de derivadas parciales para calcular $\frac{∂ f}{∂ x}$ para la función
$$f(x,y,z)=x^2-3xy+2y^2-4xz+5yz^2-12x+4y-3z$$Luego, encuentra $\frac{∂ f}{∂ y}$ y $\frac{∂ f}{∂ z}$ estableciendo las otras dos variables constantes y diferenciando en consecuencia.
Cálculo de derivadas parciales para una función de tres variables
Calcula las tres derivadas parciales de las siguientes funciones.
Luego, encuentra $\frac{∂ f}{∂ y}$ y $\frac{∂ f}{∂ z}$ estableciendo las otras dos variables constantes y diferenciando en consecuencia.
Considera la función
$$f (x,y) = 2x^3-4xy^2 + 5y^3-6xy + 5x - 4y + 12$$Sus derivadas parciales son
$$\frac{∂ f}{∂ x} = 6x^2-4y^2-6y + 5\text{ y }\frac{∂ f}{∂ y} = -8xy + 15y^2-6x - 4$$Cada una de estas derivadas parciales es una función de dos variables, por lo que podemos calcular derivadas parciales de estas funciones. Al igual que con las derivadas de funciones de una sola variable, podemos llamar a estas derivadas de segundo orden, derivadas de tercer orden, etc. En general, se denominan derivadas parciales de orden superior. Hay cuatro derivadas parciales de segundo orden para cualquier función (siempre que existan):
$$\frac{∂^2 f}{∂ x^2} = \frac{∂}{∂ x}\Bigg[\frac{∂ f}{∂ x}\Bigg], \frac{∂^2 f}{∂ x∂ y} = \frac{∂}{∂ x}\Bigg[\frac{∂ f}{∂ y}\Bigg], \frac{∂^2 f}{∂ y∂ x} = \frac{∂}{∂ y}\Bigg[\frac{∂ f}{∂ x}\Bigg], \frac{∂^2 f}{∂ y^2} = \frac{∂}{∂ y}\Bigg[\frac{∂ f}{∂ y}\Bigg]$$Una notación alternativa para cada una es $f_{xx}, f_{yx}, f_{xy}$ y $f_{yy}$, respectivamente. Las derivadas parciales de orden superior calculadas con respecto a diferentes variables, como $f_{xy}$ y $f_{yx}$, se denominan comúnmente derivadas parciales mixtas.
Cálculo de segundas derivadas parciales
Calcular las las cuatro segundas derivadas parciales de de la función $f (x,y) = xe^{-3y} + sen(2x - 5y)$.
En este punto, deberíamos notar que bajo ciertas condiciones $\frac{∂^2 f}{∂ x∂ y} = \frac{∂^2 f}{∂ y∂ x}$. De hecho, es una consecuencia directa del siguiente teorema.
Igualdad de derivadas parciales mixtas (teorema de Clairaut)
Supongamos que $f (x,y)$ se define en un disco abierto $D$ que contiene el punto $(a, b)$. Si las funciones $f_{xy}$ y $f_{yx}$ son continuas en $D$, entonces $f_{xy} = f_{yx}$.
El teorema de Clairaut garantiza que, siempre que las derivadas mixtas de segundo orden sean continuas, el orden en el que elegimos diferenciar las funciones (es decir, qué variable va primero, luego la segunda, etc.) no importa. También puede extenderse a derivadas de orden superior. La prueba del teorema de Clairaut se puede encontrar en los libros de cálculo más avanzados.
Se pueden calcular otras dos derivadas parciales de segundo orden para cualquier función $f (x,y)$.
La derivada parcial $f_{xx}$ es igual a la derivada parcial de $f_x$ con respecto a $x$, y $f_{yy}$ igual a la derivada parcial de $f_y$ con respecto a $y$.
En el curso de ecuaciones diferenciales, estudiaste ecuaciones diferenciales en las que la función desconocida tenía una variable independiente. Una ecuación diferencial parcial es una ecuación que involucra una función desconocida de más de una variable independiente y una o más de sus derivadas parciales. Ejemplos de ecuaciones diferenciales parciales son
$$u_t=c^2(u_{xx}+u_{yy})\tag{$4.17$}$$(ecuación de calor en dos dimensiones)
$$u_{tt}=c^2(u_{xx}+u_{yy})\tag{$4.18$}$$(ecuación de onda en dos dimensiones)
$$u_{xx}=+u_{yy}=0\tag{$4.19$}$$(La ecuación de Laplace en dos dimensiones)
En las dos primeras ecuaciones, la función desconocida $u$ tiene tres variables independientes: $t, x$ e $y$, y $c$ es una constante arbitraria. Las variables independientes $x$ e $y$ se consideran variables espaciales, y la variable $t$ representa el tiempo. En la ecuación de Laplace, la función desconocida $u$ tiene dos variables independientes $x$ e $y$.
Una solución a la ecuación de onda
Comprueba esto
$$u (x, y, t) = 5sen (3π x) sen (4π y) cos (10π t)$$es una solución a la ecuación de onda
$$u_{tt} = 4 (u_{xx} + u_{yy})\tag{$4.20$}$$
Dado que la solución a la ecuación del calor bidimensional es una función de tres variables, no es fácil crear una representación visual de la solución. Podemos graficar la solución para valores fijos de $t$, lo que equivale a instantáneas de las distribuciones de calor en tiempos fijos. Estas instantáneas muestran cómo se distribuye el calor sobre una superficie bidimensional a medida que pasa el tiempo. El gráfico de la solución anterior en el tiempo $t = 0 $ aparece en la siguiente figura. A medida que pasa el tiempo, los extremos se nivelan, acercándose a cero a medida que $t$ se acerca al infinito.
Si consideramos la ecuación de calor en una dimensión, entonces es posible graficar la solución con el tiempo. La ecuación de calor en una dimensión se convierte en
$$u_t=c^2u_{xx}$$donde $c^2$ representa la difusividad térmica del material en cuestión.

Una solución de esta ecuación diferencial se puede escribir en la forma
$$u_m(x,t)= e^{-π^2m^2c^2t}sen(mπ x)$$donde $m$ es cualquier número entero positivo. Un gráfico de esta solución que usa $m = 1$ aparece en la , donde la distribución de temperatura inicial sobre un cable de longitud $1$ está dada por $u (x, 0) = senπ x$. Observa que a medida que pasa el tiempo, el cable se enfría. Esto se ve porque, de izquierda a derecha, la temperatura más alta (que ocurre en el medio del cable) disminuye y cambia de color de rojo a azul.
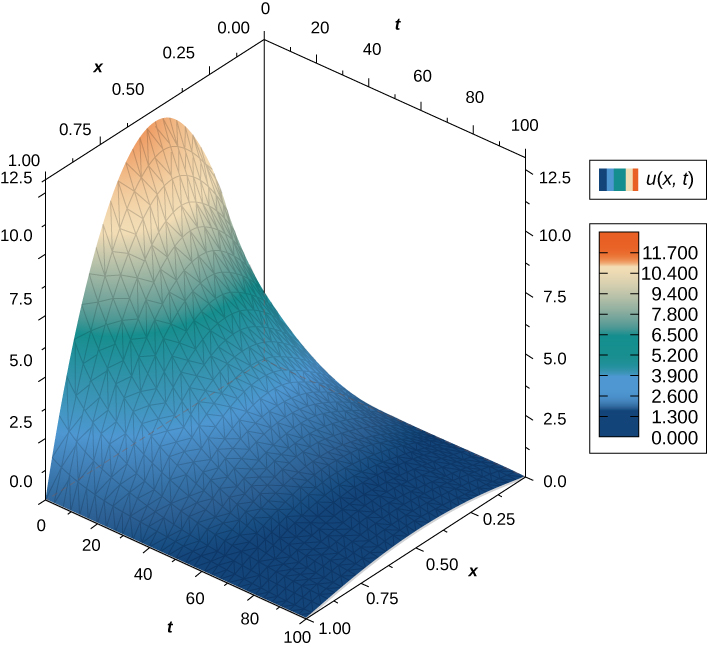
Lord Kelvin y la era de la tierra
A finales de 1800, los científicos del nuevo campo de la geología llegaron a la conclusión de que la Tierra debe tener "millones y millones" de años. Casi al mismo tiempo, Charles Darwin había publicado su tratado sobre la evolución.

El punto de vista de Darwin era que la evolución necesitaba muchos millones de años para tener lugar, e hizo una audaz afirmación de que los campos "Weald chalk", donde se encontraron fósiles importantes, fueron el resultado de 300 millones de años de erosión.
En ese momento, el físico eminente William Thomson (Lord Kelvin) usó una ecuación diferencial parcial importante, conocida como la ecuación de difusión de calor, para estimar la edad de la Tierra al determinar cuánto tiempo le tomaría a la Tierra enfriarse de la roca fundida a lo que teníamos en ese momento. Su conclusión fue un rango de 20 a 400 millones de años, pero muy probablemente unos 50 millones de años. Durante muchas décadas, las proclamaciones de este ícono irrefutable de la ciencia no le sentaron bien a los geólogos ni a Darwin.
Kelvin hizo suposiciones razonables basadas en lo que se sabía en su tiempo, pero también hizo varias suposiciones que resultaron estar equivocadas. Una suposición incorrecta era que la Tierra es sólida y que, por lo tanto, el enfriamiento fue solo por conducción, lo que justifica el uso de la ecuación de difusión. Pero el error más grave fue perdonable: la omisión del hecho de que la Tierra contiene elementos radiactivos que continuamente suministran calor debajo del manto de la Tierra. El descubrimiento de la radiactividad llegó cerca del final de la vida de Kelvin y reconoció que su cálculo tendría que modificarse.
Kelvin usó el modelo unidimensional simple aplicado solo a la capa externa de la Tierra, y dedujo la edad de los gráficos y el gradiente de temperatura más o menos conocido cerca de la superficie de la Tierra. Echemos un vistazo a una versión más apropiada de la ecuación de difusión en coordenadas radiales, que tiene la forma
$$\frac{∂ T}{∂ t} = K\bigg[\frac{∂^2 T}{∂ r^2} +\frac{2}{r} \frac{∂ T}{∂ r} \bigg]\tag{$4.23$}$$Aquí, $T (r, t)$ es la temperatura en función de $r$ (medido desde el centro de la Tierra) y el tiempo $t$. $K$ es la conductividad térmica, para roca fundida, en este caso. El método estándar para resolver una ecuación diferencial parcial de este tipo es mediante la separación de variables, donde expresamos la solución como el producto de funciones que contienen cada variable por separado. En este caso, escribiríamos la temperatura como
$$T(r,t)=R(r)f(t)$$Ahora, podemos verificar mediante sustitución directa para cada ecuación que las soluciones son $f (t) = Ae^{-λ^2t}$ y $R(r) = B\big(\frac{senα r}{r}\big) + C \big(\frac{cosα r}{r}\big)$, donde $α = λ/ \sqrt{K}$. Ten en cuenta que $f (t) = Ae^{ + λ n^2t}$ también es una solución válida, por lo que podríamos haber elegido $+ λ^2$ para nuestra constante. ¿Puedes ver por qué no sería válido para este caso a medida que aumenta el tiempo?
Por lo tanto, la superficie alcanzó una temperatura moderada muy temprano y permaneció casi constante a una temperatura de superficie $T_s$. Para simplificar, configuremos $T = 0$ en $r = R_E$ y busquemos $α$ de manera que esta sea la temperatura allí para todo el tiempo $t$ (Kelvin tomó el valor como $300 K \approx 80° F$. Podemos agregar esta constante de $300 K$ a nuestra solución más adelante). Para que esto sea cierto, el argumento seno debe ser cero en $r = R_E$. Ten en cuenta que $α$ tiene una serie infinita de valores que satisface esta condición. Cada valor de $α$ representa una solución válida (cada uno con su propio valor para $A$). La solución total o general es la suma de todas estas soluciones.
Observa cómo los valores de $α n$ provienen de la condición de frontera aplicada en la parte b. El término $\frac{-1^{n - 1}}{n}$ es la constante $A_n$ para cada término de la serie, determinada a partir de la aplicación del método de Fourier.
Dejando $β = π R_E$, examina los primeros términos de esta solución que se muestran aquí y observa cómo $λ^2$ en el exponencial hace que los términos más altos disminuyan rápidamente a medida que pasa el tiempo:
$$T(r,t) = \frac{T_0R_E}{π r}\bigg(e^{-Kβ^2 r}(sen β r) + \frac{1}{2}e^{-4Kβ^2 r} (sen 2β r)+ \frac{1}{3}e^{-9Kβ^2 r}(sen 3β r)\\ -\frac{1}{4}e^{-16Kβ^2 r}(sen 4β r) +\frac{1}{5}e^{-25Kβ^2 r}(sen 5β r)\bigg)...$$Cerca del tiempo $t = 0$, se necesitan muchos términos de la solución para la precisión. Insertando valores para la conductividad $K$ y $β = π / R_E$ para un tiempo cercano a solo miles de años, solo los primeros términos hacen una contribución significativa. Kelvin solo necesitaba mirar la solución cerca de la superficie de la Tierra () y, después de un largo tiempo, determinar qué tiempo produjo el gradiente de temperatura estimado conocido durante su era (aumento $1° F$ por cada $50 pies$). Simplemente eligió un rango de veces con un gradiente cercano a este valor. En la , las soluciones se trazan y escalan, con la temperatura de la superficie de $300 K$ añadida. Ten en cuenta que el centro de la Tierra sería relativamente frío. En ese momento, se pensaba que la Tierra debía ser sólida.
El 20 de mayo de 1990, el físico Ernest Rutherford habló en la Royal Institution para anunciar un cálculo revisado que incluía la contribución de la radiactividad como fuente de calor de la Tierra. En las propias palabras de Rutherford:
Entré en la habitación, que estaba medio oscura, y actualmente vi a Lord Kelvin en la audiencia, y me di cuenta de que estaba en

problemas en la última parte de mi discurso sobre la edad de la Tierra, donde mis puntos de vista estaban en conflicto con el suyo. Para mi alivio, Kelvin se quedó profundamente dormido, pero cuando llegué al punto importante, vi al viejo pájaro sentarse, abrir un ojo y lanzarme una mirada huraña.
Entonces llegó una inspiración repentina, y dije que Lord Kelvin había limitado la edad de la Tierra, siempre que no se descubriera una nueva fuente [de calor]. Esa expresión profética se refería a lo que ahora estamos considerando esta noche, ¡radio! ¡Mirad! El viejo muchacho sonrió sobre mí.
Rutherford calculó una edad para la Tierra de unos $500$ millones de años. El valor aceptado hoy de la edad de la Tierra es de unos $4.600$ millones de años.
Para los siguientes ejercicios, calcula la derivada parcial utilizando solo las definiciones de límite.
Para los siguientes ejercicios, calcula el signo de la derivada parcial usando la gráfica de la superficie.
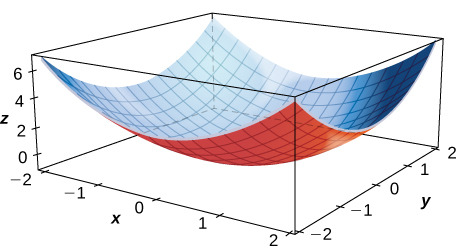
Para los siguientes ejercicios, calcula las derivadas parciales.
Evaluar las derivadas parciales en el punto $P (0,1)$.
Encuentra las derivadas parciales de orden superior indicadas.
$A = 0.885t - 22.4h + 1.20th - 0.544$. Encuentra $\frac{∂ A}{∂ t}$ y $\frac{∂ A}{∂ h}$ cuando $t = 20° F$ y $h = 0.90$.
Consideramos el problema de encontrar el plano tangente a una superficie, que es análogo a encontrar la ecuación de una recta tangente a una curva $y=f(x)$. La pendiente de la recta tangente en el punto $x = a$ es dada por $m = f'(a)$; ¿Cuál es la pendiente de un plano tangente?
Intuitivamente, parece claro que, en un plano, solo una recta puede ser tangente a una curva en un punto. Sin embargo, en el espacio tridimensional, muchas rectas pueden ser tangentes a un punto dado. Si estas rectas se encuentran en el mismo plano, determinan el plano tangente en ese punto. Un plano tangente en un punto regular contiene todas las rectas tangentes a ese punto. Una forma más intuitiva de pensar en un plano tangente es asumir que la superficie es lisa en ese punto (sin esquinas). Luego, una recta tangente a la superficie en ese punto en cualquier dirección no tiene cambios abruptos en la pendiente porque la dirección cambia suavemente.

Para que exista un plano tangente a una superficie en un punto de esa superficie, es suficiente que la función que define la superficie sea diferenciable en ese punto, definida más adelante en este apartado. Definimos el término plano tangente aquí y luego exploramos la idea intuitivamente.
Sean $S$ una superficie definida por una función diferenciable $z = f(x,y)$, y $P_0=(x_0, y_0)$ un punto en el dominio de $f$. Luego, la ecuación del plano tangente a $S$ en $P_0$ está dado por
$$z = f(x_0, y_0) + f_x(x_0, y_0)(x - x_0) + f_y(x_0, y_0)(y - y_0)\tag{$4.24$}$$Para ver por qué esta fórmula es correcta, primero encontremos dos rectas tangentes a la superficie $S$. La ecuación de la recta tangente a la curva que está representada por la intersección de $S$ con la traza vertical dada por $x = X_0$ es $z = f(x_ 0, y_0) + f_y(X_0, y_0)(y - y_0)$ . Del mismo modo, la ecuación de la recta tangente a la curva que está representada por la intersección de $S$ con la traza vertical dada por $y = y_0$ es $z= f(Xx_0, y_0) + f_x(x_0, y_0)(x - x_0)$ . Un vector paralelo a la primera recta tangente es $\bold{a} = \bold{j} + f_y(x_0, y_0)\bold{k}$; un vector paralelo a la segunda recta tangente es $\bold{b} = \bold{i} + f_x(x_0, y_0)\bold{k}$ . Podemos tomar el producto cruz de estos dos vectores:
$$\begin{aligned} \bold{a × b} &= (\bold{j} + f_y(x_0, y_0)\bold{k})× (\bold{i} + f_x(x_0, y_0)\bold{k}\\ &= \begin{vmatrix} \bold{i} & \bold{j} & \bold{k}\\ 0 & 1 & f_y(x_0, y_0)\\ 1 & 0 & f_x(x_0, y_0) \end{vmatrix}\\ &= f_x(x_0, y_0)\bold{i} + f_y(x_0, y_0)\bold{j} - \bold{k} \end{aligned}$$Este vector es perpendicular a ambas rectas y, por lo tanto, perpendicular al plano tangente. Podemos usar este vector como un vector normal para el plano tangente, junto con el punto $P_0 = (x_0, y_0, f(x_0, y_0))$ en la ecuación para un plano:
Resolviendo esta ecuación para $z$ da la ecuación 4.24.
Encontrar un plano tangente
Encuentra la ecuación del plano tangente a la superficie definida por la función $f(x , y) = 2x^2 - 3xy + 8y^2 + 2x - 4y + 4$ en el punto $(2 , -1)$
Encontrar otro plano tangente
Encuentra la ecuación del plano tangente a la superficie definida por la función $f(x,y) = sen(2x)cos(3y)$ en el punto $(π/3, π/4)$.
Un plano tangente a una superficie no siempre existe en cada punto de la superficie. Considera la función:
$$f(x,y) = \begin{cases} \frac{xy}{\sqrt{x^2+y^2}}\;\;(x,y)≠(0, 0) \\ 0\;\;(x,y)=(0, 0) \end{cases}$$El gráfico de esta función es:

Si algún $x = 0$ o $y = 0$, entonces $f(x,y)=0$, luego el valor de la función no cambia ni en el eje $x$ ni en el eje $y$ . Por lo tanto, $f_x(x, 0) = f_y(0, y) = 0$, así como $x$ o $y$ cercanos a cero, estas derivadas parciales permanecen iguales a cero. Sustituyéndolos en la ecuación 4.24 da $z = 0$ como la ecuación de la recta tangente.
Puedes interactuar con la gráfica, diseñada en DescartesJS, a continuación:
Sin embargo, si nos acercamos al origen desde una dirección diferente, obtenemos una historia diferente. Por ejemplo, supongamos que nos acercamos al origen a lo largo de la recta $y = x$. Si ponemos $y = x$ en la función original, se convierte en
$$f(x, x) = \frac{x(x)}{\sqrt{x^2+(x)^2}} = \frac{x^2}{\sqrt{2x^2}} = \frac{|x|}{\sqrt{2}}$$ Cuando $x \gt 0$, la pendiente de esta curva es igual a $\sqrt{2}/2$; cuando $x \lt 0$, la pendiente de esta curva es igual a $-\sqrt{2}/2$.Esto presenta un problema. En la definición de plano tangente, suponemos que todas las rectas tangentes a través del punto $P$ (en este caso, el origen) se encontraba en el mismo plano. Claramente, este no es el caso aquí. Cuando estudiamos funciones diferenciables, veremos que esta función no es diferenciable en el origen.
Recordemos a partir de aproximaciones lineales y diferenciales que la fórmula para la aproximación lineal de una función $f(x)$ en el punto $x = a$ está dada por:
$$y \approx f(a) + f'(a)(x - a)$$El diagrama para la aproximación lineal de una función de una variable aparece en el siguiente gráfico.

La recta tangente se puede utilizar como una aproximación a la función $f(x)$ para valores de $x$ razonablemente cerca de $x = a$. Cuando se trabaja con una función de dos variables, la recta tangente se reemplaza por un plano tangente, pero la idea de aproximación es muy parecida.
Dada una función $z = f(x,y)$ con derivadas parciales continuas que existen en el punto $(x_0, y_0)$, la aproximación lineal de $f$ en el punto $(x_0, y_0)$ está dada por la ecuación
$$L(x, y )= f(x_0, y_0) + f_x(x_0, y_0)(x - x_0) + f_y(x_0, y_0)(y - y_0)\tag{$4.25$}$$Observa que esta ecuación también representa el plano tangente a la superficie definida por $z = f(x,y)$ en el punto $(x_0, y_0)$. La idea detrás del uso de una aproximación lineal es que, si hay un punto $(x_0, y_0)$ en el cual el valor preciso de $f(x,y)$ es conocido, entonces por valores de $(x,y)$ razonablemente cerca de $(x_0, y_0)$, la aproximación lineal (es decir, el plano tangente) produce un valor que también es razonablemente cercano al valor exacto de $f(x,y)$ (). Además, el plano que se usa para encontrar la aproximación lineal es también el plano tangente a la superficie en el punto $(x_0, y_0)$.
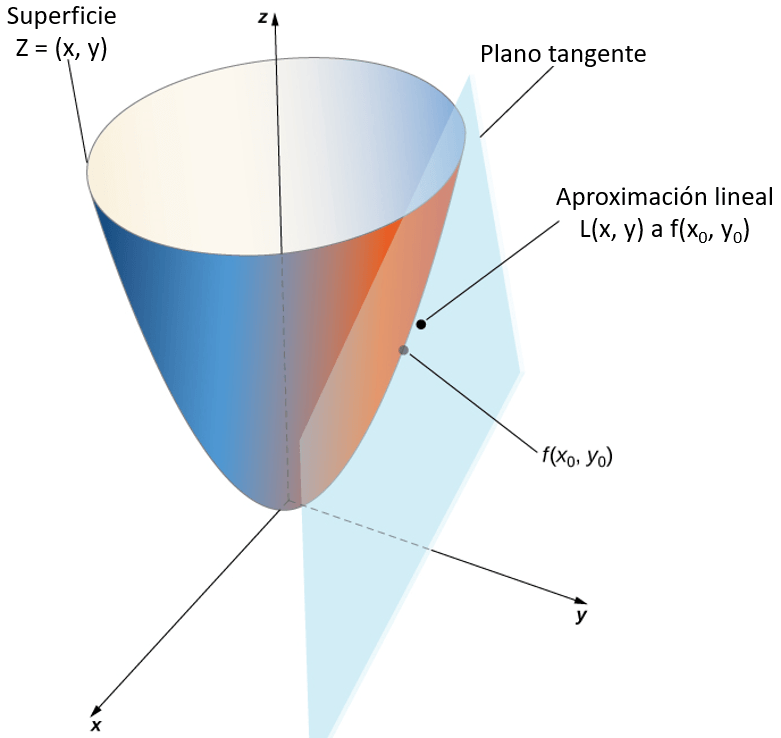
Usando una aproximación de plano tangente
Dada la función $f(x,y) = \sqrt{41 - 4x^2 - y^2}$, aproxima $f( 2.1, 2.9 )$ utilizando el punto $(2, 3)$ para $(x_0, y_0)$. ¿Cuál es el valor aproximado de $f( 2.1, 2.9 )$ a cuatro decimales?
Cuando trabajas con una función $y = f(x)$ de una variable, se dice que la función es diferenciable en un punto $x = a$ si $f'(a)$ existe. Además, si una función de una variable es diferenciable en un punto, el gráfico es "suave" en ese punto (es decir, no existen esquinas) y una recta tangente está bien definida en ese punto.
La idea detrás de la diferenciabilidad de una función de dos variables está relacionada con la idea de suavidad en ese punto. En este caso, se considera que una superficie es lisa en el punto $P$ si existe un plano tangente a la superficie en ese punto. Si una función es diferenciable en un punto, entonces existe un plano tangente a la superficie en ese punto. Recordemos la fórmula para un plano tangente en un punto $(x_0, y_0)$ está dado por
$$z = f(x_0, y_0) + f_x(x_0, y_0)(x - x_0) + f_y(x_0, y_0)(y - y_0)$$Para que exista un plano tangente en el punto $(x_0, y_0)$, las derivadas parciales deben por lo tanto existir en ese punto. Sin embargo, esta no es una condición suficiente para la suavidad, como se ilustra en la . En ese caso, las derivadas parciales existían en el origen, pero la función también tenía una esquina en el gráfico en el origen.
Una función $f(x,y)$ es diferenciable en un punto $P(x_0, y_0)$ si, $\forall(x,y) ∈ δ$ alrededor de $P$,
$$\begin{aligned} f(x,y) &= f(x_0, y_0) + f_x(x_0, y_0)(x - x_0) \\ & + f_y(x_0, y_0)(y - y_0) + E(x,y)\tag{$4.26$} \end{aligned}$$donde el término $E$ satisface
$$\lim\limits_{(x,y) \to (x_0, y_0)}\frac{E(x,y)}{\sqrt{(x - x_0)^2 + (y - y_0)^2}} = 0$$El último término en la ecuación 4.26 se conoce como el término de error y representa la proximidad del plano tangente a la superficie en un pequeño vecindario (disco $δ$) del punto $P$. Para que la función $f$ sea diferenciable en $P$, la función debe ser suave, es decir, la gráfica de $f$ debe estar cerca del plano tangente para los puntos cercanos a $P$.
Demostrando la diferenciabilidad
Demuestra que la función $f (x,y) = 2x^2-4y$ es diferenciable en el punto $(2, -3)$.
La función $f(x,y) = \begin{cases} \frac{xy}{\sqrt{x^2+y^2}}\;\;(x,y) ≠ (0, 0) \\ 0\;\;(x,y)=(0, 0) \end{cases}$ no es diferenciable en el origen. Podemos ver esto calculando las derivadas parciales. Esta función apareció anteriormente en la sección, donde mostramos que $f_x(0, 0) = f_y(0, 0) = 0$. Sustituyendo esta información en la Ecuación 4.26 y usando $x_0 = 0$ e $y_0 = 0$, obtenemos
Calculando el límite:
$$\begin{aligned} \lim\limits_{(x,y) \to (x_0, y_0)}\frac{E(x,y)}{\sqrt{(x - x_0)^2 + (y - y_0)^2}} &= \lim\limits_{(x,y) \to (0, 0)}\frac{\frac{xy}{\sqrt{x^2 + y^2}}}{\sqrt{x^2 + y^2}}\\ &= \lim\limits_{(x,y) \to (0, 0)}\frac{xy}{x^2 + y^2} \end{aligned}$$Dependiendo de la ruta tomada hacia el origen, este límite toma diferentes valores. Por lo tanto, el límite no existe y la función $f$ no es diferenciable en el origen como se muestra en la siguiente figura.

La diferenciabilidad y la continuidad para funciones de dos o más variables están conectadas, lo mismo que para funciones de una variable. De hecho, con algunos ajustes de notación, el teorema básico es el mismo.
La diferenciabilidad implica continuidad
Sea $z = f(x,y)$ una función de dos variables con $(x_0, y_0)$ en el dominio de $f$. Si $f(x,y)$ es diferenciable en $(x_0, y_0)$, entonces $f(x,y)$ es continua en $(x_0, y_0)$.
La diferenciabilidad implica que la continuidad muestra que si una función es diferenciable en un punto, entonces es continua allí. Sin embargo, si una función es continua en un punto, entonces no es necesariamente diferenciable en ese punto. Por ejemplo,
$$f(x,y) = \begin{cases} \frac{xy}{\sqrt{x^2+y^2}}\;\;(x,y) ≠ (0, 0) \\ 0\;\;(x,y)=(0, 0) \end{cases}$$es continua en el origen, pero no es diferenciable en el origen. Esta observación también es similar a la situación en el cálculo de una sola variable.
La continuidad de las primeras derivadas parciales implica diferenciabilidad, explora aún más la conexión entre continuidad y diferenciabilidad en un punto. Este teorema dice que si la función y sus derivadas parciales son continuas en un punto, la función es diferenciable.
La continuidad de las primeras parciales implica diferenciabilidad
Sea $z = f(x,y)$ una función de dos variables con $(x_0, y_0)$ en el dominio de $f$. Si $f(x,y)$, $f_x (x,y)$ y $f_y(x,y)$ existen en un vecindario de $(x_0, y_0)$ y son continuas en $(x_0, y_0)$, entonces $f(x,y)$ es diferenciable allí.
Recordemos que anteriormente mostramos que la función
$$f(x,y) = \begin{cases} \frac{xy}{\sqrt{x^2+y^2}}\;\;(x,y) ≠ (0, 0) \\ 0\;\;(x,y)=(0, 0) \end{cases}$$no era diferenciable en el origen. Calculemos las derivadas parciales $f_x$ y $f_y$:
$$\frac{∂ f}{∂ x} = \frac{y^3}{(x^2+y^2)^{3/2}}\;\;y\;\; \frac{∂ f}{∂ y} = \frac{x^3}{(x^2+y^2)^{3/2}}$$La contraposición del teorema anterior establece que si una función no es diferenciable, entonces al menos una de las hipótesis debe ser falsa. Exploremos la condición que $f_x(0, 0)$ debe ser continua. Para que esto sea cierto, debe ser cierto que $\lim\limits_{(x,y) \to (0, 0)}f_x(0, 0) = f_x(0, 0)$:
$$\lim\limits_{(x,y) \to (0, 0)}f_x(0, 0) = \lim\limits_{(x,y) \to (0, 0)}\frac{y^3}{(x^2+y^2)^{3/2}}$$Sea $x = ky$. Luego
$$\begin{aligned} \lim\limits_{(x,y) \to (0, 0)}\frac{y^3}{(x^2+y^2)^{3/2}} &= \lim\limits_{y \to 0}\frac{y^3}{\bigg((ky)^2+y^2\bigg)^{3/2}}\\ &= \lim\limits_{y \to 0}\frac{y^3}{(k^2y^2+y^2)^{3/2}}\\ &= \lim\limits_{y \to 0}\frac{y^3}{|y|^3(k^2+1)^{3/2}}\\ &= \frac{1}{(k^2+1)^{3/2}}\lim\limits_{y \to 0}\frac{|y|}{y} \end{aligned}$$Si $y\gt 0$, entonces esta expresión es igual a $1/(k^2 + 1)^{3/2}$; si $y\lt 0$, entonces es igual a $-\bigg(1/(k^2 + 1)^{3/2}\bigg)$. En cualquier caso, el valor depende de $k$, por lo que el límite no existe.
En el apartado "Aproximaciones lineales y diferenciales", primero estudiamos el concepto de diferenciales. El diferencial de $y$, escrito $dy$, se define como $f'(x)dx$. El diferencial se usa para aproximar $Δ y = f(x + Δ x) - f(x)$, donde $Δ x = dx$. Extendiendo esta idea a la aproximación lineal de una función de dos variables en el punto $(x_0, y_0)$ se obtiene la fórmula para el diferencial total para una función de dos variables.
Sea $z = f(x,y)$ una función de dos variables con $(x_0, y_0)$ en el dominio de $f$, y se elija $Δ x$ y $Δ y$ para que $(x_0 + Δ x, y_0 + Δ y)$ también esté en el dominio de $f$. Si $f$ es diferenciable en el punto $(x_0, y_0)$, entonces los diferenciales $dx$ y $dy$ se definen como
$$dx = Δ x\;\;\text{y}\;\; dy = Δ y$$El diferencial $dz$, también llamado diferencial total de $z = f(x,y)$ en $(x_0, y_0)$, se define como
$$dz = f_x(x_0,y_0)dx + f_y(x_0,y_0)dy \tag{$4.27$}$$Observa que el símbolo $∂$ no se usa para denotar el diferencial total; más bien, $d$ aparece delante de $z$. Ahora, definamos $Δ z = f(x + Δ x, y + Δ y) - f(x,y)$. Usamos $dz$ para aproximar $Δ z$, entonces
$$Δ z \approx dz = f_x(x_0, y_0)dx + f_y(x_0, y_0)dy$$Por lo tanto, el diferencial se usa para aproximar el cambio en la función $z = f(x_0, y_0)$ en el punto $(x_0, y_0)$ para valores dados de $Δ x$ y $Δ y$. Como $Δ z = f(x + Δ x, Δ y + Δ y) - f(x,y)$, esto se puede usar para aproximar $f(x + Δ x, y + Δ y)$:
$$\begin{aligned} f(x + Δ x, Δ y + Δ y) &= f(x,y) + Δ z\\ &\approx f(x,y) + f_x(x_0, y_0)Δ x + f_y(x_0, y_0)Δ y \end{aligned}$$Observa la siguiente figura:
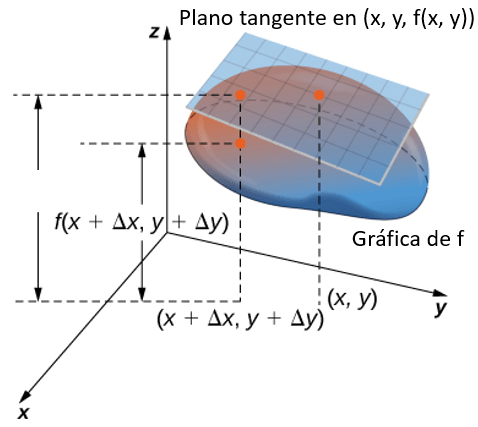
Una aplicación de esta idea es determinar la propagación de errores. Por ejemplo, si estamos fabricando un dispositivo y estamos fuera de cierta cantidad al medirla, el diferencial se puede usar para estimar el error en el volumen total del dispositivo.
Aproximación por diferenciales
Encuentra el diferencial $dz$ de la función $f(x,y) = 3x^2-2xy + y^2$ y úsalo para aproximar $Δ z$ en el punto $(2, -3)$. Usa $Δ x = 0.1$ y $Δ y = -0.05$. ¿Cuál es el valor exacto de $Δ z$?
Todos los resultados anteriores para la diferenciabilidad de las funciones de dos variables se pueden generalizar a funciones de tres variables. Primero, la definición:
Una función $f (x, y, z)$ es diferenciable en un punto $P(x_0, y_0, z_0)$ si para todos los puntos $(x, y, z)$ en un disco $δ$ alrededor de $P$ podemos escribir
$$f(x,y) = f(x_0, y_0, z_0) + f_x(x_0, y_0, z_0)(x - x_0)\\ + f_y(x_0, y_0, z_0)(y - y_0) + f_z(x_0, y_0, z_0)(z - z_0)\\ + E(x, y, z) \tag{$4.28$}$$donde el término de error, $E$, satisface:
$$\lim\limits_{(x, y, z) \to (x_0, y_0, z_0)}\frac{E(x, y, z)}{\sqrt{(x-x_0)^2+(y-y_0)^2+(z-z_0)^2}}=0$$Si una función de tres variables es diferenciable en un punto $(x_0, y_0, z_0)$, entonces es continua allí. Además, la continuidad de las primeras derivadas parciales en ese punto garantiza la diferenciabilidad.
Para los siguientes ejercicios, encuentra un vector normal unitario de la superficie en el punto indicado.
Para los siguientes ejercicios, como una revisión útil de las técnicas utilizadas en esta sección, encuentra un vector normal y un vector tangente en el punto $P$.
Para los siguientes ejercicios, encuentra la ecuación para el plano tangente a la superficie en el punto indicado (Insinuación: Resuelve $z$ en términos de $x$ e $y$)
Para los siguientes ejercicios, encuentra las ecuaciones paramétricas para la recta normal a la superficie en el punto indicado. (Recuerda que para encontrar la ecuación de una recta en el espacio, necesitas un punto en la recta, $P_0 (x_0, y_0, z_0)$ y un vector $\bold{n} = ⟨a, b, c⟩$ que es paralelo a la recta. Luego la ecuación de la recta es $x - x_0 = at, y - y_0 = bt, z - z_0 = ct$).
Para los siguientes ejercicios, observa la siguiente imagen:
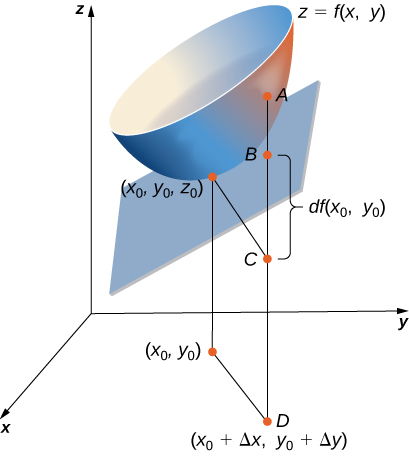
Para los siguientes ejercicios, completa cada tarea.
(Recuerda que el error porcentual es la relación de la cantidad de error sobre la cantidad original. Entonces, en este caso, el error porcentual en $a$ viene dado por $\frac{da}{a}$).
Para los siguientes ejercicios, encuentra la aproximación lineal de cada función en el punto indicado.
En el cálculo de variable única, encontramos que una de las reglas de diferenciación más útiles es la regla de la cadena, que nos permite encontrar la derivada de la composición de dos funciones. Lo mismo es cierto para el cálculo multivariable, pero esta vez tenemos que lidiar con más de una forma de la regla de la cadena. En esta sección, estudiamos extensiones de la regla de la cadena y aprendemos cómo tomar derivadas de composiciones de funciones de más de una variable.
Recuerda que la regla de la cadena para la derivada de una composición de dos funciones se puede escribir en la forma
$$\frac{d}{dx}\big( f(g(x)\big) = f'\big( g(x)\big)g'(x)$$En esta ecuación, ambas $f(x)$ y $g(x)$son funciones de una variable. Ahora supongamos que $f$ es una función de dos variables y $g$ es una función de una variable, o quizás ambas son funciones de dos variables, o incluso más. ¿Cómo calcularíamos la derivada en estos casos? El siguiente teorema nos da la respuesta para el caso de una variable independiente.
Regla de la Cadena para una variable independiente
Supón que $x=g(t)$ y $y=h(t)$ son funciones diferenciables de $t$ y $z=f(x,y)$ es una función diferenciable de $x$ y $y$. Luego $z=f(x(t),y(t))$ es una función diferenciable de $t$ y
$$\frac{dz}{dt} = \frac{∂ z}{dx} ⋅ \frac{dx}{dt} + \frac{∂ z}{dy} ⋅ \frac{dy}{dt}\tag{$4.29$}$$donde las derivadas ordinarias se evalúan en $t$ y las derivadas parciales se evalúan en $(x,y)$.
La prueba de este teorema utiliza la definición de diferenciabilidad de una función de dos variables. Supongamos que $f$ es diferenciable en el punto $P(x_0, y_0)$, dónde $x_0=g(t_0)$ y $y_0=h(t_0)$ por un valor fijo de $t_0$. Queremos demostrar que $z=f(x(t),y(t))$ es diferenciable en $t=t_0$ y la ecuación 4.29 se mantiene en ese punto también.
Ya que $f$ es diferenciable en $P$, sabemos
$$\begin{aligned} z(t) &= f(x,y)\\ &= f(x_0,y_0)+f_x(x_0,y_0)(x-x_0)\\ & + f_y(x_0,y_0)(y-y_0)+ E(x,y)\tag{$4.30$} \end{aligned}$$donde $\lim\limits_{(x,y) \to (x_0, y_0)}\frac{E(x,y)}{\sqrt{(x-x_0)^2+(y-y_0)^2}}=0$. Luego restamos $z_0=f(x_0, y_0)$ de ambos lados de esta ecuación:
A continuación, dividimos ambos lados por $t-t_0$
$$\begin{aligned} \frac{z(t)-z(t_0)}{t-t_0} &= f_x(x_0, y_0)\bigg(\frac{x(t)-x(t_0)}{t-t_0}\bigg) \\ &\quad + f_y(x_0, y_0)\bigg(\frac{y(t)-y(t_0)}{t-t_0}\bigg) + \frac{E\big(x(t) - y(t)\big)}{t-t_0} \end{aligned}$$Luego tomamos el límite cuando $t$ se acerca a $t_0$
$$\begin{aligned} \lim\limits_{t \to t_0}\frac{z(t)-z(t_0)}{t-t_0} &= f_x(x_0, y_0)\lim\limits_{t \to t_0}\bigg(\frac{x(t)-x(t_0)}{t-t_0}\bigg) \\ &\quad + f_y(x_0, y_0)\lim\limits_{t \to t_0}\bigg(\frac{y(t)-y(t_0)}{t-t_0}\bigg)\\ &\quad + \lim\limits_{t \to t_0}\frac{E\big(x(t) - y(t)\big)}{t-t_0} \end{aligned}$$El lado izquierdo de esta ecuación es igual a $\frac{dz}{dt}$, lo que lleva a
$$\frac{dz}{dt} = f_x(x_0, y_0)\frac{dx}{dt} + f_y(x_0, y_0)\frac{dy}{dt} + \lim\limits_{t \to t_0}\frac{E\big(x(t) - y(t)\big)}{t-t_0}$$El último término puede reescribirse como
$$\begin{aligned} \lim\limits_{t \to t_0}\frac{E\big(x(t) - y(t)\big)}{t-t_0} & = \lim\limits_{t \to t_0}\bigg(\frac{E(x,y)}{\sqrt{(x-x_0)^2+(y-y_0)^2}}\frac{\sqrt{(x-x_0)^2+(y-y_0)^2}}{t-t_0}\bigg)\\ &= \lim\limits_{t \to t_0}\bigg(\frac{E(x,y)}{\sqrt{(x-x_0)^2+(y-y_0)^2}}\bigg)\lim\limits_{t \to t_0}\bigg(\frac{\sqrt{(x-x_0)^2+(y-y_0)^2}}{t-t_0}\bigg) \end{aligned}$$Como $t$ se aproxima a $t_0$, $(x(t), y(t))$ se aproxima a $\big(x(t_0), y(t_0)\big)$, podemos reescribir el último producto como
$$\lim\limits_{(x,y) \to (x_0, y_0)}\bigg(\frac{E(x,y)}{\sqrt{(x-x_0)^2+(y-y_0)^2}}\bigg)\lim\limits_{(x,y) \to (x_0, y_0)}\bigg(\frac{\sqrt{(x-x_0)^2+(y-y_0)^2}}{t-t_0}\bigg)$$Como el primer límite es igual a cero, solo necesitamos mostrar que el segundo límite es finito:
Ya que $x(t)$ y $y(t)$ son ambas funciones diferenciables de $t$, existen ambos límites dentro del último radical. Por lo tanto, este valor es finito. Esto prueba la regla de la cadena en $t =t_0$; El resto del teorema se deriva de la suposición de que todas las funciones son diferenciables en todos sus dominios.
Un examen más detallado de la ecuación 4.29 revela un patrón interesante. El primer término en la ecuación es $\frac{∂ f}{∂ x} ⋅ \frac{dx}{dt}$ y el segundo término es $\frac{∂ f}{∂ y} ⋅ \frac{dy}{dt}$ . Recuerda que al multiplicar fracciones, se puede usar la cancelación. Si tratamos estas derivadas como fracciones, entonces cada producto se "simplifica" a algo parecido $\frac{∂ f}{dt}$. Las variables $x$ e $y$ que desaparecen en esta simplificación a menudo se denominan variables intermedias: son variables independientes para la función $f$, pero son variables dependientes para la variable $t$. Aparecen dos términos en el lado derecho de la fórmula, y $f$ es una función de dos variables. Este patrón también funciona con funciones de más de dos variables, como veremos más adelante en esta sección.
Usando la regla de la cadena
Calcula $dz/dt$ para cada una de las siguientes funciones:
En la siguiente escena interactiva, diseñada en GeoGebra, adaptada de la propuesta por Kristen Beck, se ilustra la regla de la cadena para una función de dos variables, correspondiente al ejercicio anterior.
A menudo es útil crear una representación visual de la ecuación 4.29 para la regla de la cadena. Esto se llama diagrama de árbol para la regla de la cadena para funciones de una variable y proporciona una forma de recordar la fórmula ().

En este diagrama, la esquina más a la izquierda corresponde a $z=f(x,y)$. Ya que $f$ tiene dos variables independientes, hay dos líneas que provienen de esta esquina. La rama superior corresponde a la variable $x$ y la inferior a la variable $y$. Dado que cada una de estas variables depende de una variable $t$, una rama entonces viene de $x$ y otra de $y$. Por último, cada una de las ramas en el extremo derecho tiene una etiqueta que representa el camino recorrido para llegar a esa rama. Se llega a la rama superior siguiendo la rama $x$; por lo tanto, está etiquetado $(∂ z/ /∂ x)× (dx/dt)$. La rama inferior es similar $(∂ z/ /∂ y)× (dy/dt)$. Para obtener la fórmula para $dz/dt$, agrega todos los términos que aparecen en el lado derecho del diagrama. Esto nos da la ecuación 4.29. En la regla de la cadena para dos variables independientes, $z=f(x,y)$ es una función de $x$ e $y$, y ambas $x=g(u,v)$ y $y=h(u,v)$ son funciones de las variables independientes $u$ y $v$.
Regla de la cadena para dos variables independientes
Supón que $x=g(u,v)$ y $y=h(u,v)$ son funciones diferenciables de $u$ y $v$, y $z=f(x,y)$ es una función diferenciable de $x$ e $y$. Luego, $z=f\big(g(u,v), h(u,v)\big)$ es una función diferenciable de $u$ y $v$, y
$$\frac{∂ z}{∂ u} = \frac{∂ z}{∂ x}\frac{∂ x}{∂ u} + \frac{∂ z}{∂ y}\frac{∂ y}{∂ u} \tag{$4.31$}$$ $$\frac{∂ z}{∂ v} = \frac{∂ z}{∂ x}\frac{∂ x}{∂ v} + \frac{∂ z}{∂ y}\frac{∂ y}{∂ v} \tag{$4.32$}$$Podemos dibujar un diagrama de árbol para cada una de estas fórmulas, así:
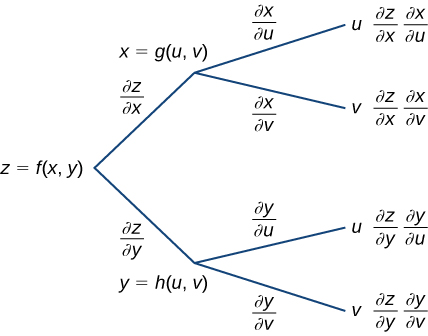
Para deducir la fórmula para $\frac{∂ z}{∂ u}$, comienza desde el lado izquierdo del diagrama, luego sigue solo las ramas que terminan con $u$ y agrega los términos que aparecen al final de esas ramas. Para la fórmula para $\frac{∂ z}{∂ v}$, sigue solo las ramas que terminan con $v$ y agrega los términos que aparecen al final de esas ramas.
Hay una diferencia importante entre estos dos teoremas de la regla de la cadena. En la regla de la cadena para una variable independiente, el lado izquierdo de la fórmula para la derivada no es una derivada parcial, pero en la Regla de cadena para dos variable independientes sí lo es.
La razón es que, en la regla de cadena para una variable independiente, $z$ es en última instancia solo una función de $t$, mientras que en la regla de cadena para dos variables independientes, $z$ es una función de $u$ y $v$
Usando la regla de la cadena para dos variables
Calcule $\frac{∂ z}{∂ u}$ y $\frac{∂ z}{∂ v}$ usando las siguientes funciones:
$$z = f(x,y) = 3x^2 - 2xy + y^2,\\ x = x(u, v) = 3u + 2v,\;\; y = y(u, v) = 4u - v$$
Ahora que hemos visto cómo extender la regla de la cadena original a las funciones de dos variables, es natural preguntar:
¿Podemos extender La regla para más de dos variables? La respuesta es sí, como dice la regla generalizada de la cadena.
Regla generalizada de la cadena
Sea $w = f(x_1, x_2, ..., x_m)$ una función diferenciable de $m$ variables independientes, y para cada $i ∈ \{ 1, ..., m\}$, sea $x_i = x_i(t_1, t_2, ..., t_n)$ una función diferenciable de $n$ variables independientes. Luego
$$\frac{∂ w}{∂ t_j} = \frac{∂ w}{∂ x_1}\frac{∂ x_1}{∂ t_j}+ \frac{∂ w}{∂ x_2}\frac{∂ x_2}{∂ t_j}+\dots \frac{∂ w}{∂ x_m}\frac{∂ x_m}{∂ t_j}\tag{$4.33$}$$para todo $j ∈ \{ 1, 2,…, n\}$
En el siguiente ejercicio calcularemos la derivada de una función de tres variables independientes en las que cada una de las tres variables dependen de otras dos variables.
Usando la regla generalizada de la cadena
Calcula $\frac{∂ w}{∂ u}$ y $\frac{∂ w}{∂ v}$ usando las siguientes funciones:
$$w = f(x, y, z) = 3x^2 - 2xy + 4z^2\\
x = x(u, v) = e^usen v\\
y = y(u, v) = e^ucos v\\
z = z(u, v) = e^u$$
Dibujando un diagrama de árbol
Crea un diagrama de árbol para el caso cuando $$w = f(x, y, z),\; x = x (t, u, v),\; y = y (t, u, v),\; z = z (t, u, v)$$
y escribe las fórmulas para las tres derivadas parciales de $w$.
Recuerda que la diferenciación implícita proporciona un método para encontrar $dy/dx$ cuando $y$ se define implícitamente como una función de $x$. El método consiste en diferenciar ambos lados de la ecuación definiendo la función con respecto a $x$, luego resolviendo $dy/dx$. Las derivadas parciales proporcionan una alternativa a este método.
Considera la elipse definida por la ecuación $x^2 + 3y^2 + 4y - 4 = 0 $.
Esta ecuación define implícitamente $y$ como una función de $x$. Como tal, podemos encontrar la derivada $dy/dx$ usando el método de diferenciación implícita:
$$\begin{aligned} \frac{d}{dx}\big(x^2 + 3y^2 + 4y - 4\big) &= \frac{d}{dx}(0)\\ 2x + 6y\frac{dy}{dx} + 4\frac{dy}{dx} &= 0 \end{aligned}$$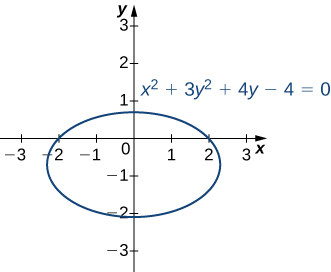
También podemos definir una función $z = f(x,y)$ usando el lado izquierdo de la ecuación que define la elipse. Entonces $f (x,y) = x^2 + 3y^2 + 4y - 4$. La elipse $x^2 + 3y^2 + 4y - 4 = 0$ se puede describir con la ecuación $f (x,y) = 0$. Usando esta función y el siguiente teorema nos da un enfoque alternativo para el cálculo de $dy/dx$
Diferenciación implícita de una función de dos o más variables
Supón que la función $z = f(x,y)$ define $y$ implícitamente como una función $y = g (x)$ de $x$ a través de la ecuación $f (x,y) = 0$.
Luego
$$\frac{dy}{dx} = -\frac{∂ f/∂ x}{∂ f/∂ y}\tag{$4.34$}$$siendo $f_y (x,y) ≠ 0$. Si la ecuación $f (x, y, z) = 0$ define $z$ implícitamente como una función diferenciable de $x$ e $y$, entonces
$$\frac{∂ z}{∂ x} = -\frac{∂ f/∂ x}{∂ f/∂ z}\;\;y\;\; \frac{∂ z}{∂ y} = -\frac{∂ f/∂ y}{∂ f/∂ z}\tag{$4.35$}$$siempre que $f_z (x, y, z) ≠ 0$.
La ecuación 4.34 es una consecuencia directa de la ecuación 4.31. En particular, si suponemos que $y$ se define implícitamente como una función de $x$ a través de la ecuación $f (x,y) = 0$, podemos aplicar la regla de la cadena para encontrar $dy/dx$:
$$\begin{aligned} \frac{d}{dx}f(x,y) &= \frac{d}{dx}(0)\\ \frac{∂ f}{∂ x} ⋅ \frac{dx}{dx} + \frac{∂ f}{∂ y} ⋅ \frac{dy}{dx} & = 0\\ \frac{∂ f}{∂ x} + \frac{∂ f}{∂ y} ⋅ \frac{dy}{dx} & = 0 \end{aligned}$$Resolver esta ecuación para $dy/dx$ da la ecuación 4.34. La ecuación 4.35 puede derivarse de manera similar.
Volvamos ahora al problema que comenzamos antes del teorema anterior. Usando la diferenciación implícita de una función de dos o más variables y la función $f (x,y) = x^2 + 3y^2 + 4y - 4$, obtenemos
$$\begin{aligned} \frac{∂ f}{∂ x} &=2x\\ \frac{∂ f}{∂ y} &= 6y+4 \end{aligned}$$Entonces por la ecuación 4.34 obtenemos
$$\frac{dy}{dx} = -\frac{∂ f/∂ x}{∂ f/∂ y} = -\frac{2x}{6y+4} = -\frac{x}{3y+2}$$que es el mismo resultado obtenido por el uso anterior de la diferenciación implícita.
Diferenciación implícita por derivadas parciales
La primera parte del ejercicio anterior, la hemos representado en la siguiente escena interactiva diseñada en GeoGebra:
Para los siguientes ejercicios, usa la información provista para resolver el problema.
Para los siguientes ejercicios, encuentra $\frac{df}{dt}$ usando la regla de la cadena y la sustitución directa
Para los siguientes ejercicios, encuentre $\frac{dy}{dx}$ usando derivadas parciales
Para los siguientes ejercicios, usa esta información: Se dice que una función $f (x,y)$ es homogénea de grado $n$ si $f (tx, ty) = t^nf (x,y)$. Para todas las funciones homogéneas de grado $n$, la siguiente ecuación es verdadera: $x\frac{∂ f}{∂ x} + y\frac{∂ f}{∂ y} = n f(x,y)$. Demuestra que la función dada es homogénea y verifica que $x\frac{∂ f}{∂ x} + y\frac{∂ f}{∂ y} = n f(x,y)$.
Encuentra la tasa de cambio del volumen de este tronco cuando $x = 10 pulg$., $y = 12 pulg.$ y $z = 18 pulg.$
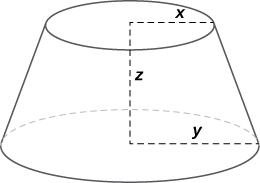
¿Qué tan rápido aumenta la temperatura en la trayectoria de la mosca después de $3$ segundos? (Solución).
En Derivadas parciales introdujimos la derivada parcial. Una función $z = f(x,y)$ tiene dos derivadas parciales: $\frac{∂ z}{∂ x}$ y $\frac{∂ z}{∂ y}$. Estas derivadas corresponden a cada una de las variables independientes y pueden interpretarse como tasas de cambio instantáneas (es decir, como pendientes de una línea tangente). Por ejemplo, $\frac{∂ z}{∂ x}$ representa la pendiente de una línea tangente que pasa a través de un punto dado en la superficie definida por $z = f(x,y)$, suponiendo que la línea tangente sea paralela al eje $x.$ Del mismo modo, $\frac{∂ z}{∂ y}$ representa la pendiente de la línea tangente paralela al eje $y$. Ahora consideramos la posibilidad de una línea tangente paralela a ninguno de los ejes.
Comenzamos con la gráfica de una superficie definida por la ecuación $z = f(x,y)$. Dado un punto $(a, b)$ en el dominio de $f$, elegimos una dirección para viajar desde ese punto.
Medimos la dirección usando un ángulo $θ$, que se mide en sentido antihorario en el plano $x, y$, comenzando en cero desde el eje $x$ positivo (). La distancia que recorremos es $h$ y la dirección en la que viajamos viene dada por el vector unitario $\bold{u} = (cos θ)\bold{i} + (sen θ)\bold{j}$. Por lo tanto, la coordenada $z$ del segundo punto en la gráfica viene dada por $z = f(a + h cos θ, b + h sen θ)$.

Podemos calcular la pendiente de la línea secante dividiendo la diferencia en los valores $z$ por la longitud del segmento de línea que conecta los dos puntos en el dominio. La longitud del segmento de línea es $h$. Por lo tanto, la pendiente de la línea secante es
$$m_{sec} = \frac{f(a + h cos θ, b + h sen θ) - f(a, b)}{h}$$Para encontrar la pendiente de la línea tangente en la misma dirección, tomamos el límite cuando $h$ se acerca a cero.
Supón que $z = f(x,y)$ es una función de dos variables con un dominio de $D$. Sea $(a, b)∈ D$ y definamos $\bold{u} = cos θ\bold{i} + sen θ\bold{j}$. Entonces la derivada direccional de $f$ en la dirección de $u$ viene dada por
$$D_u f(a, b) = \lim\limits_{h \to 0}\frac{f(a + h cos θ, b + h sen θ) - f(a, b)}{h} \tag{$4.36$}$$siempre que exista el límite.
Encontrar una derivada direccional desde la definición
Sea $θ = arccos (3/5)$. Encuentra la derivada direccional $D_\bold{u} f(x,y)$ de $f (x,y) = x^2 - xy + 3y^2$ en la dirección de $\bold{u} = (cos θ)\bold{i} + (sen θ)\bold{j}$. ¿Cuál es $D_u f(-1, 2)$?
La siguiente escena interactiva, diseñada por Elena Álvarez, muestra una interpretación geométrica de la derivada direccional, la cual tiene las siguientes características:
Otro enfoque para calcular una derivada direccional, como lo hace la escena anterior, implica derivadas parciales, como se describe en el siguiente teorema.
Derivada direccional de una función de dos variables
Sea $z = f(x,y)$ una función de dos variables $x$ e $y$, y supón que existen $f_x$ y $f_y$. Entonces la derivada direccional de $f$ en la dirección de $\bold{u} = cos θ\bold{i} + sen θ\bold{j}$ viene dada por
$$D_\bold{u} f(x,y) = f_x(x,y)cos θ + f_y(x,y)sen θ\tag{$4.37$}$$La ecuación 4.36 establece que la derivada direccional de $f$ en la dirección de $\bold{u} = cos θ\bold{i} + sen θ\bold{j}$ viene dada por
$$D_u f(a, b) = \lim\limits_{t \to 0}\frac{f(a + t cos θ, b + t sen θ) - f(a, b)}{t}$$Sea $x = a + t cos θ$ e $y = b + t sen θ$, y definamos $g (t) = f(x,y)$. Dado que $f_x$ y $f_y$ existen, podemos usar la regla de la cadena para funciones de dos variables para calcular $g'(t)$:
$$\begin{aligned} g'(t) &= \frac{∂ f}{∂ x}\frac{dx}{dt} + \frac{∂ f}{∂ y}\frac{dy}{dt}\\ &= f_x(x,y)cos θ + f_y(x,y)sen θ \end{aligned}$$Si $t = 0$, entonces $x = x_0$ e $y = y_0$, luego
$$g'(0) = f_x(x_0, y_0)cos θ + f_y(x_0, y_0)sen θ.$$Por la definición de $g'(t)$, también es cierto que
$$\begin{aligned} g'(0) &= \lim\limits_{t \to 0}\frac{g(t)-g(0)}{t}\\ &= \lim\limits_{t \to 0}\frac{f(x_0 + t cos θ, y_0 + t sen θ) - f(x_0, y_0)}{t} \end{aligned}$$Por lo tanto, $D_\bold{u} f(x_0, y_0) = f_x (x,y) cos θ + f_y (x,y) sen θ$.
Encontrar una derivada direccional: método alternativo
Sea $θ = arccos (3/5)$. Encuentra la derivada direccional $D_\bold{u} f(x,y)$ de $f (x,y) = x^2 - xy + 3y^2$ en la dirección de $\bold{u} = (cos θ)\bold{i} + (sen θ)\bold{j}$. ¿Cuál es $D_u f(-1, 2)$?
Si el vector que se da para la dirección de la derivada no es un vector unitario, entonces solo es necesario dividirlo por la norma del vector. Por ejemplo, si quisiéramos encontrar la derivada direccional de la función en el ejemplo anterior en la dirección del vector $⟨-5, 12⟩$, primero dividiríamos por su magnitud para obtener $\bold{u}$. Esto nos da $\bold{u} = ⟨- (5/13), 12/13⟩$. Luego
$$\begin{aligned} D_\bold{u} f(x,y) &= ∇ f(x,y) ⋅ \bold{u}\\ &= -\frac{5}{13}(2x-y)+\frac{12}{13}(-x+6y)\\ &= -\frac{22}{13}x + \frac{17}{13}y \end{aligned}$$El lado derecho de la ecuación 4.37 es igual a $f_x (x,y) cos θ + f_y(x,y) sen θ$, que puede escribirse como el producto escalar de dos vectores. Definamos el primer vector como $∇ f(x,y) = f_x (x,y)\bold{i} + f_y (x,y)\bold{j}$ y el segundo vector como $\bold{u} = (cos θ)\bold{i} + (sen θ)\bold{j}$. Luego, el lado derecho de la ecuación se puede escribir como el producto escalar de estos dos vectores:
$$D_\bold{u} f(x,y) = ∇ f(x,y) ⋅ \bold{u}\tag{$4.38$}$$El primer vector en la ecuación 4.38 tiene un nombre especial: el gradiente de la función $f$. El símbolo $∇$ se llama nabla.
Sea $z = f(x,y)$ una función de $x$ e $y$ tal que existan $f_x$ y $f_y$. El vector $∇ f(x,y)$ se llama gradiente de $f$ y se define como
$$∇ f(x,y) = f_x(x,y)\bold{i} + f_y(x,y)\bold{j}\tag{$4.39$}$$El vector $∇ f(x,y)$ también se escribe como "$grad f$".
Encuentra el gradiente $∇ f(x,y)$ de cada una de las siguientes funciones:
El gradiente tiene algunas propiedades importantes. Ya hemos visto una fórmula que usa el gradiente: la fórmula para la derivada direccional. Recuerda de "El producto punto" que si el ángulo entre dos vectores $\bold{a}$ y $\bold{b}$ es $ϕ$, entonces $\bold{a} ⋅ \bold{b} = ||\bold{a}|| \; ||\bold{b}||cos ϕ$. Por lo tanto, si el ángulo entre $∇ f(x_0, y_0)$ y $\bold{u} = (cos θ)\bold{i} + (sen θ)\bold{j}$ es $ϕ$, tenemos
$$D_u f(x_0, y_0) = ∇ f(x_0, y_0) ⋅ \bold{u} = ||∇ f(x_0, y_0)||\; ||\bold{u}||cos ϕ\\ = ||∇ f(x_0, y_0) || cos ϕ$$La $||\bold{u}||$ desaparece porque $\bold{u}$ es un vector unitario. Por lo tanto, la derivada direccional es igual a la magnitud del gradiente evaluado en $(x_0, y_0)$ multiplicado por $cos ϕ$. Recuerda que $cos ϕ$ varía de $-1$ a $1$. Si $ϕ = 0$, entonces $cos ϕ = 1$ y $∇ f(x_0, y_0)$ y $\bold{u}$ apuntan en la misma dirección. Si $ϕ = π$, entonces $cos ϕ = -1$ y $∇ f(x_0, y_0)$ y $\bold{u}$ apuntan en direcciones opuestas. En el primer caso, el valor de $D_\bold{u} f(x_0, y_0)$ se maximiza; en el segundo caso, el valor de $D_\bold{u} f(x_0, y_0)$ se minimiza. Si $∇ f(x_0, y_0)=0$, entonces $D_\bold{u} f(x_0, y_0) = ∇ f(x_0, y_0) ⋅ \bold{u} = 0$ para cualquier vector $\bold{u}$. Estos tres casos se resumen en el siguiente teorema

Encontrar una derivada direccional máxima:
Encuentra la dirección para la cual la derivada direccional de $f (x,y) = 3x^2 - 4xy + 2y^2$ en $(-2, 3)$ es un máximo. ¿Cuál es el valor máximo?
La muestra una parte de la gráfica de la función $f (x,y) = 3 + sen x sen y$. Dado un punto $(a, b)$ en el dominio de $f$, el valor máximo del gradiente en ese punto viene dado por $||∇ f(a, b)||$. Esto sería igual a la velocidad de mayor ascenso si la superficie representara un mapa topográfico. Si fuéramos en la dirección opuesta, sería la tasa de mayor descenso.
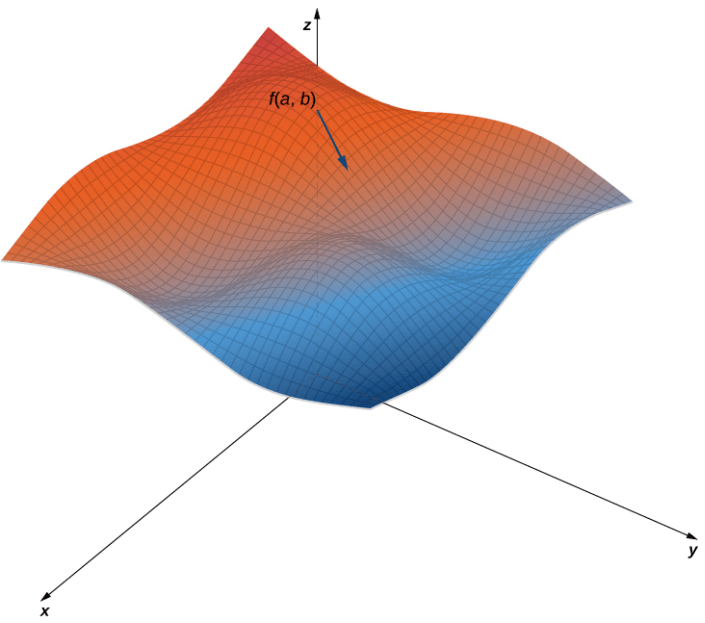
En la siguiente escena interactiva, diseñada por Walerij Koschkin, hemos representado la función $f(x,y)=3x^2 - 4xy + 2y^2$ del ejercicio anterior. El punto $P$ es diferente, pues el valor de $z=54$, del ejercicio, se nos aleja demasiado en la gráfica. Puedes mover el punto y observar el gradiente (flecha azul) y los valores de las derivada direccionales en ese punto.
Puedes hacer clic en el cuadrado de la esquina inferior derecha, para ver la escena en pantalla ampliada.
Cuando se usa un mapa topográfico, la pendiente más pronunciada siempre está en la dirección donde las líneas de contorno están más cercanas entre sí (ver ). Esto es análogo al mapa de contorno de una función, suponiendo que las curvas de nivel se obtienen para valores igualmente espaciados en todo el rango de esa función.
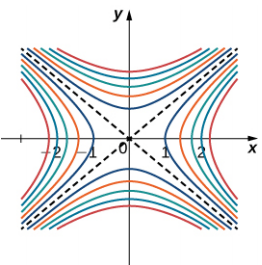
Recuerda que si una curva se define paramétricamente por el par de funciones $\big(x (t), y (t)\big)$, entonces el vector $x'(t)\bold{i} + y'(t)\bold{j}$ es tangente a la curva para cada valor de $t$ en el dominio. Ahora, supongamos que $z = f(x,y)$ es una función diferenciable de $x$ e $y$, y $(x_0, y_0)$ está en su dominio. Supongamos, además, que $x_0 = x (t_0)$ e $y_0 = y (t:0)$ para algún valor de $t$, y consideremos la curva de nivel $f (x,y) = k$. Definamos $g (t) = f \big(x (t), y (t)\big) $ y calculemos $g'(t)$ en la curva de nivel. Por la regla de la cadena,
$$g'(t) = f_x\big(x(t), y(t)\big)x'(t) + f_y\big(x(t), y(t)\big)y'(t)$$Pero $g'(t) = 0$ porque $g (t) = k$ para todo $t$. Por lo tanto, por un lado,
$$f_x\big(x(t), y(t)\big)x'(t) + f_y\big(x(t), y(t)\big)y'(t) = 0$$por otra parte,
Por lo tanto
$$∇ f(x,y) ⋅ ⟨x'(t), y'(t)⟩ = 0$$Por lo tanto, el producto escalar de estos vectores es igual a cero, lo que implica que son ortogonales. Sin embargo, el segundo vector es tangente a la curva de nivel, lo que implica que el gradiente debe ser normal a la curva de nivel, lo que da lugar al siguiente teorema.
El gradiente es normal a la curva de nivel
Supón que la función $z = f(x,y)$ tiene derivadas parciales continuas de primer orden en un disco abierto centrado en un punto $(x_0, y_0)$. Si $∇ f(x_0, y_0) ≠ 0$, entonces $∇ f(x_0, y_0)$ es normal a la curva de nivel de $f$ en $(x_0, y_0)$.
Podemos usar este teorema para encontrar vectores tangentes y normales para las curvas de nivel de una función.
Encontrar tangentes para curvas de nivel
Para la función $f (x,y) = 2x^2 - 3xy + 8y^2 + 2x - 4y + 4$, encuentra un vector tangente a la curva de nivel en el punto $(-2, 1)$. Grafica la curva de nivel correspondiente a $f (x,y) = 18$ y dibuja $∇ f(-2, 1)$ y un vector tangente.
La siguiente escena interactiva, diseñada por Elena Álvarez, permite comprobar la propiedad que dice que el gradiente de una función $f$ en un punto P es ortogonal a la curva de nivel que pasa por dicho punto.
En la escena, una vez introducida la función $z=f(x,y)$, se puede, o bien introducir las coordenadas de un punto $P(a,b)$, o bien el valor de $k$ que permite obtener la curva de nivel $f(x,y)=k$. En el primer caso, el valor de $k$ se obtiene como $k=f(a,b)$; en el segundo, el punto $P$ se puede mover únicamente por la curva $f(x,y)=k$.
La definición de un gradiente puede extenderse a funciones de más de dos variables.
Sea $w = f(x, y, z)$ una función de tres variables tales que existan $f_x, f_y$ y $f_z$. El vector $∇ f(x, y, z)$ se llama gradiente de $f$ y se define como
$$∇ f(x, y, z) = f_x(x, y, z)\bold{i} + f_y(x, y, z)\bold{j} \\+ f_z(x, y, z)\bold{k}\tag{$4.40$}$$ $∇ f(x, y, z)$ también se puede escribir como $grad f(x, y, z)$.Calcular el gradiente de una función en tres variables es muy similar a calcular el gradiente de una función en dos variables. Primero, calculamos las derivadas parciales $f_x, f_y$ y $f_z$, y luego usamos la ecuación 4.40.
Encontrar gradientes en tres dimensiones
Encuentra el gradiente $∇ f(x, y, z)$ de cada una de las siguientes funciones:
La derivada direccional también se puede generalizar a funciones de tres variables. Para determinar una dirección en tres dimensiones, se necesita un vector con tres componentes. Este vector es un vector unitario, y los componentes del vector unitario se denominan cosenos direccionales. Dado un vector unitario tridimensional $\bold{u}$ en forma estándar (es decir, el punto inicial está en el origen), este vector forma tres ángulos diferentes con los ejes positivo $x, y$ y $z$. Llamemos a estos ángulos $α, β$ y $γ$.
Luego, los cosenos direccionales están dados por $cos α, cos β$ y $cos γ$. Estos son los componentes del vector unitario $\bold{u}$; como $\bold{u}$ es un vector unitario, es cierto que $cos^2 α + cos^2 β + cos^2 γ = 1$.
Supongamos que $w = f(x, y, z)$ es una función de tres variables con un dominio de $D$. Sea $(x_0, y_0, z_0) ∈ D$ y sea $u = cos α\bold{i} + cos β\bold{j} + cos γ\bold{k}$ un vector unitario. Entonces, la derivada direccional de $f$ en la dirección de $\bold{u}$ viene dada por
$$D_u f(x_0, y_0, z_0)$$ $$= \lim\limits_{t \to 0} \frac{f_(x_0 + t cos α, y_0 + t cos β, z_0 + t cos γ) - f(x_0, y_0, z_0)}{t}\tag{$4.41$}$$siempre que exista el límite.
Podemos calcular la derivada direccional de una función de tres variables usando el gradiente, lo que lleva a una fórmula análoga a la ecuación 4.38.
Derivada direccional de una función de tres variables
Sea $f (x, y, z)$ una función diferenciable de tres variables y sea $\bold{u} = cos α\bold{i} + cos β\bold{j} + cos γ\bold{k}$ un vector unitario.
Entonces, la derivada direccional de $f$ en la dirección de $\bold{u}$ viene dada por
$$\begin{aligned} D_u f(x, y, z) &= ∇ f(x, y, z) ⋅ \bold{u}\tag{$4.42$}\\ &= f_x(x, y, z)cos α\\ &+ f_y(x, y, z)cos β\\ &+ f_z(x, y, z)cos γ \end{aligned}$$Los tres ángulos $α, β$ y $γ$ determinan el vector unitario $\bold{u}$. En la práctica, podemos usar un vector arbitrario (no unitario), luego dividirlo por su magnitud para obtener un vector unitario en la dirección deseada.
Encontrar una derivada direccional en tres dimensiones
Calcula $D_u f(1, -2, 3)$ en la dirección de $\bold{v} = -\bold{i} + 2\bold{j} + 2\bold{k}$ para la función
$$f(x, y, z) = 5x^2 - 2xy + y^2 - 4yz + z^2 + 3xz$$
Para los siguientes ejercicios, encuentra la derivada direccional utilizando solo la definición de límite.
Para los siguientes ejercicios, encuentra la derivada direccional de la función en el punto $P$ en la dirección de $\bold{v}$.
Para los siguientes ejercicios, encuentra la derivada direccional de la función en la dirección del vector unitario $\bold{u} = cos θ\bold{i} + sen θ\bold{j}$.
Para los siguientes ejercicios, encuentra el gradiente.
Para los siguientes ejercicios, encuentra la derivada direccional de la función en el punto $P$ en la dirección de $Q$
Para los siguientes ejercicios, encuentra la derivada de la función en $P$ en la dirección de $\bold{u}$.
Para los siguientes ejercicios, encuentre el vector del gradiente en el punto indicado.
Para los siguientes ejercicios, encuentra la derivada de la función.
Para los siguientes ejercicios, encuentra la tasa máxima de cambio de $f$ en el punto dado y la dirección en que ocurre.
Para los siguientes ejercicios, encuentra las ecuaciones de
Resuelve los siguientes problemas.
Una de las aplicaciones más útiles para derivadas de una función de una variable es la determinación de valores máximos y/o mínimos. Esta aplicación también es importante para las funciones de dos o más variables, pero como hemos visto en secciones anteriores de este capítulo, la introducción de más variables independientes conduce a más resultados posibles para los cálculos. Las ideas principales de encontrar puntos críticos y usar pruebas derivadas siguen siendo válidas, pero aparecen nuevas aristas al evaluar los resultados.
Para las funciones de una sola variable, definimos los puntos críticos como los valores de la función cuando la derivada es igual a cero o no existe.
Para funciones de dos o más variables, el concepto es esencialmente el mismo, excepto por el hecho de que ahora estamos trabajando con derivadas parciales.
Sea $z = f(x,y)$ una función de dos variables que se define en un conjunto abierto que contiene el punto $(x_0, y_0)$. El punto $(x_0, y_0)$ se denomina punto crítico de una función de dos variables $f$ si se cumple una de las dos condiciones siguientes:
Encontrar puntos críticos
Encuentra los puntos críticos de cada una de las siguientes funciones:
El objetivo principal para determinar los puntos críticos es localizar máximos y mínimos relativos, como en el cálculo de variable única.
Cuando se trabaja con una función de una variable, la definición de un extremo local implica encontrar un intervalo alrededor del punto crítico de modo que el valor de la función sea mayor o menor que todos los demás valores de la función en ese intervalo. Cuando trabajamos con una función de dos o más variables, trabajamos con un disco abierto alrededor del punto.
Sea $z = f(x,y)$ una función de dos variables definidas y continuas en un conjunto abierto que contiene el punto $(x_0, y_0$). Entonces $f$ tiene un máximo local en $(x_0, y_0)\bold{i}$
$$f(x_0, y_0) \ge f(x,y)$$para todos los puntos $(x,y)$ dentro de algún disco centrado en $(x_0, y_0)$. El número $f (x_0, y_0)$ se denomina valor máximo local. Si la desigualdad anterior se cumple para cada punto $(x,y)$ en el dominio de $f$, entonces $f$ tiene un máximo global (también llamado máximo absoluto) en $(x_0, y_0)$.
La función $f$ tiene un mínimo local en $(x_0, y_0)$ si
$$f(x_0, y_0) \le f(x,y)$$para todos los puntos $(x,y)$ dentro de algún disco centrado en $(x_0, y_0)$. El número $f (x_0, y_0)$ se denomina valor mínimo local. Si la desigualdad anterior se cumple para cada punto $(x,y)$ en el dominio de $f$, entonces $f$ tiene un mínimo global (también llamado mínimo absoluto) en $(x_0, y_0)$.
Si $f (x_0, y_0)$ es un valor local máximo o mínimo local, entonces se denomina extremo local (consulta la siguiente figura).
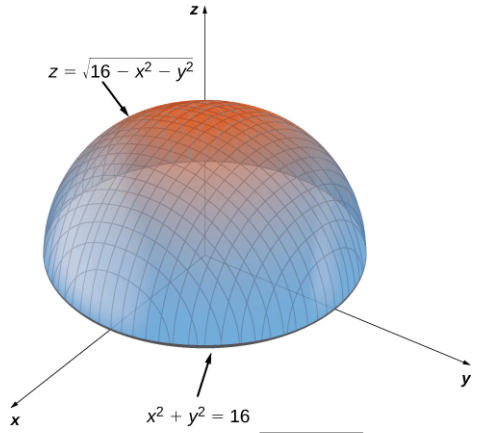
En el curso de cálculo diferencial, mostramos que los extremos de las funciones de una variable ocurren en puntos críticos. Lo mismo es cierto para funciones de más de una variable, como se indica en el siguiente teorema.
El teorema de Fermat para funciones de dos variables
Sea $z = f(x,y)$ una función de dos variables definidas y continuas en un conjunto abierto que contiene el punto $(x_0, y_0)$. Supongamos que $f_x$ y $f_y$ cada uno existe en $(x_0, y_0)$. Si $f$ tiene un extremo local en $(x_0, y_0)$, entonces $(x_0, y_0)$ es un punto crítico de $f$.
Considera la función $f (x) = x^3$. Esta función tiene un punto crítico en $x = 0$, ya que $f^{prime}(0) = 3 (0)^2 = 0$. Sin embargo, $f$ no tiene un valor extremo en $x = 0$. Por lo tanto, la existencia de un valor crítico en $x = x_0$ no garantiza un extremo local en $x = x_0$. Lo mismo es cierto para una función de dos o más variables. Una forma en que esto puede suceder es en un punto de silla. Un ejemplo de un punto de silla aparece en la siguiente figura interactiva.
En este gráfico, el origen es un punto de silla. Esto se debe a que las primeras derivadas parciales de $f (x,y) = x^2 - y^2$ son iguales a cero en este punto, pero no es un máximo ni un mínimo para la función. Además, la traza vertical correspondiente a $y = 0$ es $z = x^2$ (una parábola que se abre hacia arriba), pero la traza vertical correspondiente a $x = 0$ es $z = -y^2$ (una parábola que se abre hacia abajo). Por lo tanto, es tanto un máximo global para una traza como un mínimo global para otra.
Dada la función $z = f(x,y)$, el punto $(x_0, y_0, f(x_0, y_0))$ es un punto de silla si tanto $f_0 (x_0, y_0) = 0$ como $f_y (x_0, y_0)$ = 0, pero $f$ no tiene un extremo local en $(x_0, y_0)$.
La prueba de la segunda derivada para una función de una variable proporciona un método para determinar si un extremo se produce en un punto crítico de una función. Al extender este resultado a una función de dos variables, surge un problema relacionado con el hecho de que hay, de hecho, cuatro derivadas parciales de segundo orden diferentes, aunque la igualdad de los parciales mixtos reduce esto a tres.
La prueba de la segunda derivada para una función de dos variables, establecida en el siguiente teorema, usa un discriminante $D$ que reemplaza $f'' (x_0)$ en la prueba de la segunda derivada para una función de una variable.
Prueba de la segunda derivada
Sea $z = f(x,y)$ una función de dos variables para las cuales las derivadas parciales de primer y segundo orden son continuas en algún disco que contiene el punto $(x_0, y_0)$. Supón que $f_x (x_0, y_0) = 0$ y $fy (x_0, y_0) = 0$. Defina la cantidad
$$D = f_{xx} (x_0, y_0)f_{yy} (x_0, y_0) - \big(f_{xy} (x_0, y_0)\big)^2\tag{$4.43$}$$Para aplicar la prueba de la segunda derivada, es necesario que primero encontremos los puntos críticos de la función. Hay varios pasos involucrados en todo el procedimiento, que se describen en una la estrategia de resolución de problemas, que presentamos en la página siguiente.
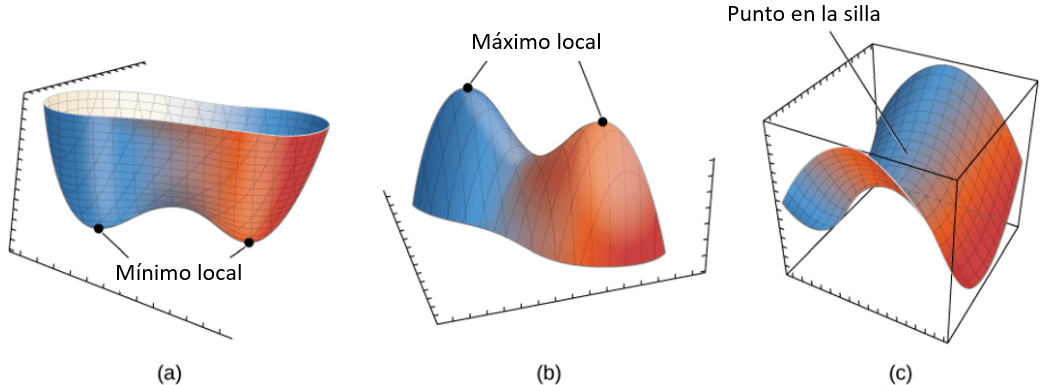
Estrategia de resolución de problemas: uso de la prueba de la segunda derivada para funciones de dos variables
Sea $z = f(x,y)$ una función de dos variables para las cuales las derivadas parciales de primer y segundo orden son continuas en algún disco que contiene el punto $(x_0, y_0)$. Para aplicar la prueba de la segunda derivada para encontrar extremos locales, utiliza los siguientes pasos:
Usando la prueba de la segunda derivada
Encuentra los puntos críticos para cada una de las siguientes funciones, y usa la prueba de la segunda derivada para encontrar los extremos locales:
Al encontrar extremos globales de funciones de una variable en un intervalo cerrado, comenzamos verificando los valores críticos durante ese intervalo y luego evaluamos la función en los puntos finales del intervalo. Cuando se trabaja con una función de dos variables, el intervalo cerrado se reemplaza por un conjunto cerrado y acotado. Un conjunto está limitado si todos los puntos de ese conjunto pueden estar contenidos dentro de una bola (o disco) de radio finito. Primero, necesitamos encontrar los puntos críticos dentro del conjunto y calcular los valores críticos correspondientes. Entonces, es necesario encontrar el valor máximo y mínimo de la función en el límite del conjunto. Cuando tenemos todos estos valores, el valor de función más grande corresponde al máximo global y el valor de función más pequeño corresponde al mínimo absoluto.
Primero, sin embargo, debemos estar seguros de que tales valores existen. El siguiente teorema hace esto.
Teorema del valor extremo
Una función continua $f (x,y)$ en un conjunto cerrado y acotado $D$ en el plano alcanza un valor máximo absoluto en algún punto de $D $y un valor mínimo absoluto en algún punto de $D$.
Ahora que sabemos que cualquier función continua $f$ definida en un conjunto cerrado y acotado alcanza sus valores extremos, necesitamos saber cómo encontrarlos.
Encontrar los valores extremos de una función de dos variables
Supón que $z = f(x,y)$ es una función diferenciable de dos variables definidas en un conjunto cerrado y acotado $D$. Entonces $f$ alcanzará el valor máximo absoluto y el valor mínimo absoluto, que son, respectivamente, los valores más grandes y más pequeños encontrados entre los siguientes:
La prueba de este teorema es una consecuencia directa del teorema del valor extremo y del teorema de Fermat. En particular, si cualquiera de los extremos no está ubicado en el límite de $D$, entonces está ubicado en un punto interior de $D$. Pero un punto interior $(x_0, y_0)$ de $D$ que es un extremo absoluto también es un extremo local; por lo tanto, $(x_0, y_0)$ es un punto crítico de $f$ según el teorema de Fermat. Por lo tanto, los únicos valores posibles para los extremos globales de $f$ en $D$ son los valores extremos de $f$ en el interior o límite de $D$.
Sea $z = f(x,y)$ una función continua de dos variables definidas en un conjunto cerrado y acotado $D$, y supón que $f$ es diferenciable en $D$. Para encontrar los valores máximos y mínimos absolutos de $f$ en $D$, haz lo siguiente:
Encontrar los valores máximos y mínimos de $f$ en el límite de $D$ puede ser un desafío. Si el límite es un rectángulo o un conjunto de líneas rectas, entonces es posible parametrizar los segmentos de línea y determinar los máximos en cada uno de estos segmentos, como se vera en el siguiente ejercicio. El mismo enfoque se puede utilizar para otras formas, como círculos y elipses.
Si el límite del conjunto $D$ es una curva más complicada definida por una función $g (x,y) = c$ para alguna constante $c$, y existen las derivadas parciales de primer orden de $g$, entonces el método de multiplicadores de Lagrange puede resultar útil para determinar los extremos de $f$ en el límite. El método de multiplicadores de Lagrange lo veremos en el próximo apartado.
Encontrar el extremo absoluto
Usa la estrategia de resolución de problemas para encontrar los extremos absolutos de una función, para determinar los extremos absolutos de cada una de las siguientes funciones:
Introducción del capítulo: pelotas de golf rentables

La compañía Pro-T ha desarrollado un modelo de ganancias que depende del número $x$ de pelotas de golf vendidas por mes (medido en miles) y el número de horas por mes de publicidad y, según la función
$$z = f(x,y) = 48x + 96y - x^2 - 2xy - 9y^2$$donde $z$ se mide en miles de dólares. El número máximo de pelotas de golf que se pueden producir y vender es de $50,000$, y el número máximo de horas de publicidad que se puede comprar es $25$. Encuentra los valores de $x$ e $y $que maximizan la ganancia, y encuentra la ganancia máxima.
Para los siguientes ejercicios, encuentra los puntos críticos.
Para los siguientes ejercicios, encuentra los puntos críticos de la función utilizando técnicas algebraicas (completando el cuadrado) o examinando la forma de la ecuación. Verifica sus resultados utilizando la prueba de derivadas parciales.
Para los siguientes ejercicios, usa la prueba de la segunda derivada para identificar los puntos críticos y determinar si cada punto crítico es un punto máximo, mínimo, de silla o ninguno de estos.
Para los siguientes ejercicios, determina los valores extremos y los puntos de silla. Usa un CAS para graficar la función.
Encuentra los extremos absolutos de la función dada en el conjunto cerrado y acotado $R$.
La solución del ejercicio 343 nos muestra que hay un punto de silla en $(π, π)$, un máximo local en $\big(\frac{π}{2}, \frac{π}{2}\big)$ y en $\big(\frac{3π}{2}, \frac{3π}{2}\big)$, y un mínimo local $\big(\frac{π}{2}, \frac{3π}{2}\big)$ y $\big(\frac{3π}{2}, \frac{π}{2}\big)$
En la siguiente escena interactiva, puedes observar esos puntos de máxima y mínima, desplazando el deslizador. Igualmente, se muestran las curvas de nivel en la ventana derecha, las cuales se reducen a medida que nos aproximamos a los puntos locales de máxima y de mínima.
Si desplazas el deslizador al centro, observarás el punto de silla. Sólo se muestra la gráfica de la función en el dominio definido para $x ∈ (0, 2π), y ∈ (0, 2π)$. Haz clic en el cuadro inferior derecho para ver la escena en pantalla completa, luego presiona la tecla "esc", para regresar al libro.
Para este mismo ejercicio, presentamos otra escena interactiva, diseñada por Elena Álvarez en DescartesJS, que permite realizar un análisis de los puntos críticos de una función real de dos variables, $z=f(x,y)$.
Se permite practicar en su búsqueda con la función dada o la que el usuario desee. Para ello, se ofrece un camino en tres pasos y una justificación teórica de los mismos basada en el método del Hessiano. La escena tiene por objetivos: estudiar el concepto de punto crítico de una función de dos variables, practicar en la búsqueda de puntos críticos de funciones de dos variables y autoevaluarse en esta práctica.
¡Haz clic en la esquina superior derecha, para ampliar la escena!
Resolver problemas de optimización para funciones de dos o más variables puede ser similar a resolver dichos problemas en el cálculo de una sola variable. Sin embargo, las técnicas para lidiar con múltiples variables nos permiten resolver problemas de optimización más variados para los cuales necesitamos lidiar con condiciones o restricciones adicionales. En esta sección, examinamos uno de los métodos más comunes y útiles para resolver problemas de optimización con restricciones.
El último ejercicio del apartado anterior era una situación aplicada que implicaba maximizar una función de ganancias, sujeta a ciertas restricciones. En ese ejercicio, las restricciones involucraban un número máximo de pelotas de golf que podían ser producidas y vendidas en $1$ mes $(x)$, y un número máximo de horas publicitarias que se pueden comprar por mes $(y)$. Supongamos que estos se combinan en una restricción presupuestaria, como $20x+4y \le 216$,que tuvo en cuenta el costo de producir las pelotas de golf y la cantidad de horas publicitarias compradas por mes. El objetivo es, aún, maximizar las ganancias, pero ahora hay un tipo diferente de restricción en los valores de $x$ y $y$. Esta restricción, cuando se combina con la función de beneficio $f(x,y)=48x+96y-x^2-2xy-9y^2$,e s un ejemplo de un problema de optimización, y la función $f(x,y)$ se llama la función objetivo. Un gráfico de varias curvas de nivel de la función $f(x,y)$ es el siguiente:
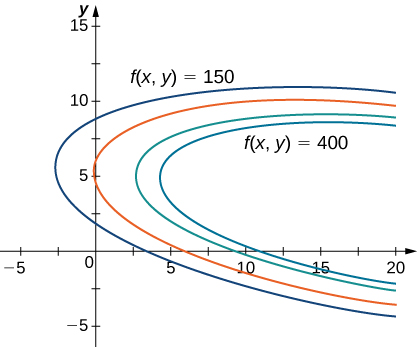
En la , el valor $c$ representa diferentes niveles de beneficio (es decir, valores de la función $f$). Como el valor de $c$ aumenta, la curva se desplaza hacia la derecha. Dado que nuestro objetivo es maximizar las ganancias, queremos elegir una curva lo más a la derecha posible. Si no hubiera restricciones en la cantidad de pelotas de golf que la compañía podría producir, o la cantidad de unidades de publicidad disponibles, entonces podríamos producir tantas pelotas de golf como queramos y publicitar tanto como queramos, y no podría no ser un beneficio máximo para la empresa. Desafortunadamente, tenemos una restricción presupuestaria modelada por la desigualdad $20x+4y \le 216$. Para ver cómo esta restricción interactúa con la función de beneficio, la muestra el gráfico de la línea $20x+4y=216$ superpuesto en el gráfico anterior.
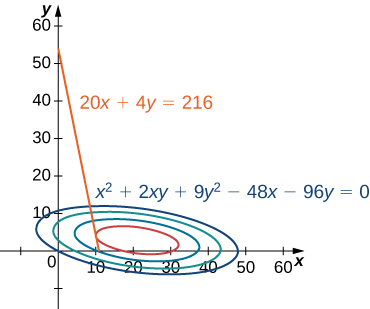
Como se mencionó anteriormente, la ganancia máxima ocurre cuando la curva de nivel está lo más hacia la derecha posible. Sin embargo, el nivel de producción correspondiente a este beneficio máximo también debe satisfacer la restricción presupuestaria, por lo que el punto en el que se produce este beneficio también debe estar en (o a la izquierda de) la línea roja en la . La inspección de este gráfico revela que este punto existe donde la línea es tangente a la curva de nivel de $f$. Una prueba y error revela que este nivel de beneficio parece ser alrededor de $395$, cuando $x$ e $y$ son ambos menos de $5$. Volveremos a la solución de este problema más adelante en esta sección.
Desde un punto de vista teórico, en el punto donde la curva de beneficio es tangente a la línea de restricción, el gradiente de ambas funciones evaluadas en ese punto debe apuntar en la misma dirección (u opuesta).
Recuerda que el gradiente de una función de más de una variable es un vector. Si dos vectores apuntan en la misma dirección (u opuesta), entonces uno debe ser un múltiplo constante del otro. Esta idea es la base del método de multiplicadores de Lagrange.
Supongamos que $f$ y $g$ son funciones de dos variables con derivadas parciales continuas en cada punto de un conjunto abierto que contiene la curva suave $g (x,y) = 0$. Supón que $f$, cuando se restringe a puntos en la curva $g (x,y) = 0$, tiene un extremo local en el punto $(x_0, y_0)$ y que $∇ g (x_0, y_0) ≠ 0$. Luego hay un número $λ$ llamado multiplicador de Lagrange, para el cual
$$∇ f(x_0, y_0) = λ ∇ g(x_0, y_0)$$Supón que se produce un extremo limitado en el punto $(x_0, y_0)$. Además, suponemos que la ecuación $g (x,y) = 0$ se puede parametrizar sin problemas como
$$x = x(s)\text{ y } y = y(s)$$donde $s$ es un parámetro de longitud de arco con punto de referencia $(x_0, y_0)$ en $s = 0$. Por lo tanto, la cantidad $z = f(x (s), y (s))$ tiene un máximo relativo o un mínimo relativo en $s = 0$, y esto implica que $\frac{dz}{ds} = 0$ en ese punto. De la regla de la cadena,
donde todas las derivadas se evalúan en $s = 0$. Sin embargo, el primer factor en el producto escalar es el gradiente de $f$, y el segundo factor es el vector unitario tangente $T (0)$ a la curva de restricción. Como el punto $(x_0, y_0)$ corresponde a $s = 0$, de esta ecuación se deduce que
$$∇ f(x_0, y_0) ⋅ T(0) = 0$$lo que implica que el gradiente es $0$ o es normal a la curva de restricción en un extremo relativo restringido. Sin embargo, la curva de restricción $g (x,y) = 0$ es una curva de nivel para la función $g (x,y)$ de modo que si $∇ g (x_0, y_0) ≠ 0$, entonces $∇ g (x_0, y_0)$ es normal para esta curva en $(x_0, y_0)$. Se deduce, entonces, que hay algún escalar $λ$ tal que
$$∇ f(x_0, y_0) = λ ∇ g (x_0, y_0)$$Para aplicar el Método de multiplicadores de Lagrange: una restricción a un problema de optimización similar al del fabricante de pelotas de golf, necesitamos una estrategia de resolución de problemas
Usando multiplicadores de Lagrange
Usa el método de multiplicadores de Lagrange para encontrar el valor mínimo de $f( x , y) = x^2 + 4y^2 - 2 x + 8y$ sujeto a la restricción $x + 2y = 7$.
Para este mismo ejercicio, presentamos otra escena interactiva de Elena Álvarez, que permite la práctica del cálculo de los extremos de una función real de dos variables condicionados a una restricción sobre el dominio, $g(x,y)=0$.
Después de repasar la definición de extremo condicionado se pasa a la escena en la que se pueden introducir tanto la función objeto de estudio, como la curva restricción.
Los objetivos de la escenas son: repasar la definiciones de extremos condicionados y multiplicadores de Lagrange; repasar el teorema de Lagrange y, practicar el cálculo, así como su representación, de los extremos condicionados de una función.
¡Haz clic en la esquina superior derecha de la escena, para ampliar!
Volvamos ahora al problema planteado al comienzo de la sección.
Pelotas de golf y multiplicadores de Lagrange
El fabricante de pelotas de golf, Pro-T, ha desarrollado un modelo de ganancias que depende del número $x$ de pelotas de golf vendidas por mes (medido en miles), y la cantidad de horas por mes de publicidad y, según la función
$$z = f( x , y) = 48x + 96y - x^2 - 2xy - 9y^2$$dónde $z$ se mide en miles de dólares. La función de restricción presupuestaria que relaciona el costo de producción de miles de pelotas de golf y unidades publicitarias viene dada por $20 x + 4 y = 216$ . Encuentra los valores de $x$ e $y$ que maximizan el beneficio y encuentra el beneficio máximo.
En el caso de una función de optimización con tres variables y una función de restricción única, también es posible utilizar el método de multiplicadores de Lagrange para resolver un problema de optimización. Un ejemplo de una función de optimización con tres variables podría ser la función Cobb-Douglas en el ejemplo anterior: $f (x, y, z) = x^{0.2} y^{0.4} z^{0.4}$, donde $x$ representa el costo de la mano de obra, $y$ representa entrada de capital, y $z$ representa el costo de la publicidad. El método es el mismo que para el método con una función de dos variables; las ecuaciones a resolver son
Multiplicadores de Lagrange con una función de optimización de tres variables
Encuentra el mínimo de la función $f( x , y, z) = x^2 + y^2 + z^2 $ sujeto a la restricción $x + y+ z= 1$.
El método de los multiplicadores de Lagrange se puede aplicar a problemas con más de una restricción. En este caso la función de optimización $w$ es una función de tres variables:
$$w = f(x, y, x)$$y está sujeto a dos restricciones:
$$g(x, y, z) = 0 \text{ y } h(x, y, z) = 0$$Hay dos multiplicadores de Lagrange, $λ_1$ y $λ_2$, y el sistema de ecuaciones se convierte en:
$$\begin{aligned} ∇ f(x_0, y_0, z_0) &= λ_1∇ g(x_0, y_0, z_0) + λ_2 ∇ h(x_0, y_0, z_0)\\ g(x_0, y_0, z_0) &= 0\\ h(x_0, y_0, z_0) &= 0 \end{aligned}$$
Multiplicadores de Lagrange con una función de optimización de tres variables
Encuentra el mínimo de la función
$$f( x , y, z) = x^2 + y^2 + z^2 $$sujeto a las restricciones $z^2 = x^2 + y^2$ y $x + y -z + 1 = 0$.
Para los siguientes ejercicios, usa el método de multiplicadores de Lagrange para encontrar los valores máximos y mínimos de la función sujeta a las restricciones dadas.
Para el siguiente grupo de ejercicios, usa el método de multiplicadores de Lagrange para resolver los siguientes problemas aplicados.

En la siguiente escena interactiva, diseñada en GeoGebra por Vladimiro González Zelaya, se muestra la función $x^2+2y^2=2$ con la restricción $x^2+y^2=1$

En este capítulo ampliamos el concepto de una integral definida de una sola variable a integrales dobles y triples de funciones de dos y tres variables, respectivamente. Examinamos aplicaciones que involucran integración para calcular volúmenes, masas y centroides de regiones más generales.
También veremos cómo el uso de otros sistemas de coordenadas (como coordenadas polares, cilíndricas y esféricas) simplifica el cálculo de integrales múltiples sobre algunos tipos de regiones y funciones. Como ejemplo, utilizaremos coordenadas polares para encontrar el volumen de estructuras como l'Hemisfèric.
En el capítulo anterior, discutimos el cálculo diferencial con múltiples variables independientes. Ahora examinamos el cálculo integral en múltiples dimensiones. Así como una derivada parcial nos permite diferenciar una función con respecto a una variable mientras se mantienen constantes las otras variables, veremos que una integral iterada nos permite integrar una función con respecto a una variable mientras se mantienen constantes las otras variables.
En este apartado investigamos las integrales dobles y mostramos cómo podemos usarlas para encontrar el volumen de un sólido sobre una región rectangular en el plano $xy$. Muchas de las propiedades de las integrales dobles son similares a las que ya hemos discutido para las integrales individuales.
Comenzamos considerando el espacio por encima de una región rectangular $R$. Considera una función continua $f(x,y) \ge 0$ de dos variables definidas en el rectángulo cerrado $R$:
$$R = [a, b] × [c, d] = \{ (x,y) ∈ ℝ^2 |a \le x \le b, c \le y \le d\}$$aquí $[a,b]×[c,d]$ denota el producto cartesiano de los dos intervalos cerrados $[a,b]$ y $[c,d]$. Consiste en pares rectangulares $(x,y)$ tal que $a\le x\le b$ y $c\le y\le d$. La gráfica de $f$ representa una superficie sobre el plano $xy$ con ecuación $z=f(x,y)$ dónde $z$ es la altura de la superficie en el punto $(x,y)$. Sea $S$ el sólido que yace arriba de $R$ y debajo de la gráfica de f(). La base del sólido es el rectángulo $R$ en el plano$xy$. Queremos encontrar el volumen $V$ del sólido $S$.
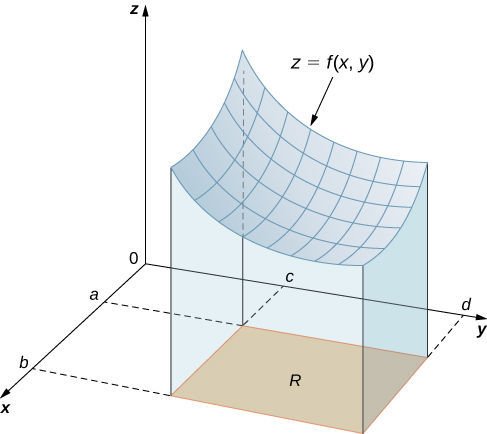
Dividimos la region $R$ en pequeños rectángulos $R_{ij}$, cada uno con area $Δ A$ y con lados $δ x$ y $Δ y$ ().
Hacemos esto dividiendo el intervalo $[a,b]$ dentro $m$ subintervalos y dividiendo el intervalo $[c,d]$ dentro $n$ subintervalos. Por lo tanto $Δ x = \frac{b-a}{m}, Δ y = \frac{d - c}{m}$, y $Δ A = Δ xΔ y$.
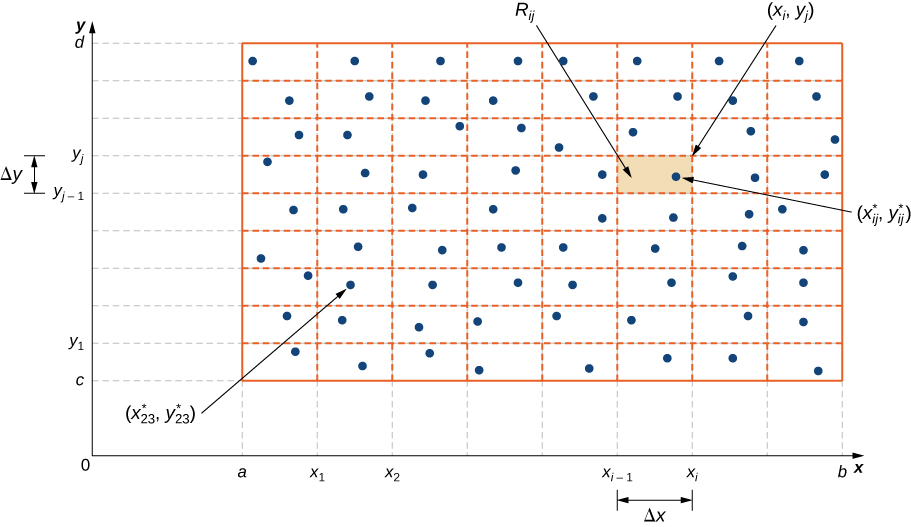
El volumen de una caja rectangular delgada arriba de $R_{ij}$ es $f(x_{ij}^*, y_{ij}^*)Δ A$, dónde $(x_{ij}^*, y_{ij}^*)$ es un punto de muestra arbitrario en cada $R_{ij}$ como se muestra en la siguiente figura.

Usando la misma idea para todos los subrectángulos, obtenemos un volumen aproximado del sólido $S$ como $V \approx \displaystyle\sum_{i=1}^m\sum_{j=1}^n f(x_{ij}^*, y_{ij}^*)Δ A$. Esta suma se conoce como una suma doble de Riemann y se puede usar para aproximar el valor del volumen del sólido. Aquí la suma doble significa que para cada subrectángulo evaluamos la función en el punto elegido, multiplicamos por el área de cada rectángulo y luego sumamos todos los resultados.
Como hemos visto en el caso de una variable, se obtiene una mejor aproximación al volumen real si $m$ y $n$ se hacen más grandes.
$$V = \lim\limits_{m,n \to \infin}\sum_{i=1}^m\sum_{j=1}^n f(x_{ij}^*, y_{ij}^*)Δ A$$O de otra forma
Ten en cuenta que la suma se aproxima a un límite en cualquiera de los casos y el límite es el volumen del sólido con la base $R$. Ahora estamos listos para definir la integral doble.
La doble integral de la función $f(x,y)$ sobre la región rectangular $R$ en el plano $xy$ se define como
$$\iint_R f(x,y)dA = \lim\limits_{m,n \to \infin}\sum_{i=1}^m\sum_{j=1}^n f(x_{ij}^*, y_{ij}^*)Δ A \tag{$5.1$}$$Si $f(x,y)\ge 0$, entonces el volumen $V$ del sólido $S$, que se encuentra arriba de $R$ en el plano $xy$ y debajo de la gráfica de $f$, es la doble integral de la función $f( x , y)$ sobre el rectángulo $R$. Si la función es alguna vez negativa, entonces la integral doble puede considerarse un volumen "con signo" de una manera similar a la forma en que definimos el área neta con signo en la integral definida de una función de un variable.
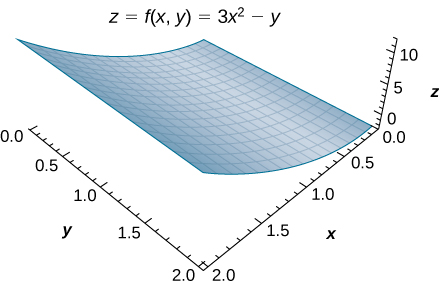
Ten en cuenta que hemos desarrollado el concepto de integral doble usando una región rectangular $R$. Este concepto puede extenderse a cualquier región general. Sin embargo, cuando una región no es rectangular, los subrectángulos pueden no encajar perfectamente en $R$, particularmente si el área base es curva. Examinamos esta situación con más detalle en la siguiente sección, donde se estudian las regiones que no siempre son rectangulares y los subrectángulos no pueden encajar perfectamente en la región $R$. Además, las alturas pueden no ser exactas si la superficie $z=f(x,y)$ es curva. Sin embargo, los errores en los lados y la altura donde las piezas pueden no encajar perfectamente dentro del sólido $S$ se acercan a $0$ con $m$ y $n$ acercándose al infinito. Además, la doble integral de la función $z=f(x,y)$ existe siempre que la función $f$ no sea demasiado discontinua. Si la función es acotada y continua sobre $R$, excepto en un número finito de curvas suaves, entonces existe la integral doble y decimos que $f$ es integrable sobre $R$.
Ya que $Δ A = Δ x Δ y = Δ yΔ x$, podemos expresar $Δ A$ como $Δ xΔ y$ o $Δ yΔ x$. Esto significa que, cuando usamos coordenadas rectangulares, la integral doble sobre una región $R$ denotada por $\displaystyle\iint_R f(x,y)dA$ puede ser escrita como $\displaystyle\iint_r f(x,y)dxdy$ o $\displaystyle\iint_r f(x,y)dydx$. Ahora enumeremos algunas de las propiedades que pueden ser útiles para calcular integrales dobles.
Las propiedades de las integrales dobles son muy útiles al calcularlas o trabajar con ellas.
Enumeramos aquí seis propiedades de integrales dobles. Las propiedades $1$ y $2$ se conocen como la linealidad de la integral, la propiedad $3$ es la aditividad de la integral, la propiedad $4$ es la monotonicidad de la integral y la propiedad $5$ se usa para encontrar los límites de la integral. La propiedad $6$ se usa si $f(x , y)$ es un producto de dos funciones $g(x)$ y $h(y)$.
Propiedades de las integrales dobles
Supón que las funciones $f(x,y)$ y $g( x, y)$ son integrables sobre la región rectangular $R$; $S$ y $T$ son subregiones de $R$; y asume que $m$ y $M$ son números reales.
Estas propiedades se utilizan en la evaluación de integrales dobles, como veremos más adelante. Nos convertiremos en expertos en el uso de estas propiedades una vez que nos familiaricemos con las herramientas computacionales de las integrales dobles. Pero, antes de ir a ello, veamos una escena interactiva diseñada por Elena Álvarez, la cual permite modificar la función, los parámetros $m$ y $n$ que definen la partición y obtener el valor exacto de la integral doble para una función de dos variables así como una aproximación mediante sumas de Riemann.
Pulsando sobre el botón información, se ilustra a través de varios pasos el proceso de construcción de la integral doble. Puedes intentar resolver el ejercicio anterior, cambiando los parámetros.
En el siguiente vídeo, puedes observar cómo se interactúa con la escena.
Hasta ahora, hemos visto cómo configurar una integral doble y cómo obtener un valor aproximado para ella. También podemos imaginar que evaluar integrales dobles usando la definición puede ser un proceso muy largo si elegimos valores más grandes para $m$ y $n$. Por lo tanto, necesitamos una técnica práctica y conveniente para calcular integrales dobles. En otras palabras, necesitamos aprender cómo calcular integrales dobles sin emplear la definición que usa límites y sumas dobles.
La idea básica es que la evaluación se vuelve más fácil si podemos dividir una integral doble en integrales individuales al integrar primero con respecto a una variable y luego con respecto a la otra. La herramienta clave que necesitamos se llama integral iterada.
Supón que $a, b, c$ y $d$ son números reales. Definimos una integral iterada para una función $f(x,y)$ sobre la región rectangular $R = [a, b] × [c, d]$ como
La notación $\displaystyle\int_a^b\bigg[\int_c^d f(x,y)dy\bigg]dx$ significa que integramos $f(x,y)$ con respecto a $y$ mientras mantenemos $x$ constante. Del mismo modo, la notación $\displaystyle\int_c^d\bigg[\int_a^b f(x,y)dx\bigg]dy$ significa que integramos $f(x,y)$ con respecto a $x$ mientras mantenemos $y$ constante. El hecho de que las integrales dobles se pueden dividir en integrales iteradas se expresa en el teorema de Fubini. Piensa en este teorema como una herramienta esencial para evaluar integrales dobles.
Teorema de Fubini
Supón que $f (x,y)$ es una función de dos variables que es continua sobre una región rectangular $\{ R = (x,y) ∈ \R^2 | a \le x \le b, c \le y \le d\}$. Luego vemos en la () que la integral doble de $f$ sobre la región es igual a una integral iterada,
$$\iint_R f(x,y)dA \iint_R f(x,y)dxdy = \int_a^b\int_c^d f(x,y)dydx \\ = \int_c^d\int_a^b f(x,y)dxdy$$En términos más generales, el teorema de Fubini es verdadero si $f$ está acotado en $R$ y $f$ es discontinuo solo en un número finito de curvas continuas. En otras palabras, $f$ tiene que ser integrable sobre $\R$.

Usando el teorema de Fubini
Usa el teorema de Fubini para calcular la integral doble $\displaystyle\iint_R f(x,y) dA$ donde $f(x,y) = x$ y $R = [0,2] × [0,1]$.
La doble integración en este ejemplo es lo suficientemente simple como para usar el teorema de Fubini directamente, lo que nos permite convertir una integral doble en una integral iterada.
En consecuencia, ahora estamos listos para convertir todas las integrales dobles en integrales iteradas y demostrar cómo las propiedades enumeradas anteriormente pueden ayudarnos a evaluar
integrales dobles cuando la función $f (x,y)$ es más compleja. Ten en cuenta que el orden de integración se puede cambiar.
Ilustrando las propiedades i y ii
Evaluar la doble integral $\displaystyle\iint_R(xy-3xy^2)dA$ donde $R = \{ (x,y)|0 \le x \le 2, 1 \le y \le 2\}$.
Ilustrando la propiedad v
Sobre la región $R = \{ (x,y) | 1 \le x \le 3, 1 \le y \le 2\}$, tenemos $2 \le x^2 + y^2 \le 13$. Encuentra un límite inferior y superior para la integral $\iint_R \big(x^2 + y^2\big)dA$.
Ilustrando la propiedad vi
Evaluar la integral $\iint_R e^ycos xdA$ sobre la región $R = \{ (x,y) | 0\le x\le \frac{π}{2}, 0\le y\le 1\}$.
En la siguiente escena interactiva, diseñada en GeoGebra por Andreas Lindner, puedes interactuar con el ejercicio anterior, donde $f(x,y) = e^ycos x$
Como mencionamos anteriormente, cuando usamos coordenadas rectangulares, la integral doble sobre una región $R$ denotada por $\displaystyle\iint_Rf (x,y) dA$ puede escribirse como $\displaystyle\iint_Rf (x,y) dxdy$ o $\displaystyle\iint_Rf (x,y) dydx$. El siguiente ejercicio se muestra que los resultados son los mismos independientemente del orden de integración que elijamos.
Evaluación de una integral iterada de dos maneras
Volvamos a la función $f (x,y) = 3x^2 - y$ de uno de los ejercicios anteriores, esta vez sobre la región rectangular $R = [0, 2] × [0, 3]$. Usa el teorema de Fubini para evaluar $\iint_Rf (x,y) dA$ de dos maneras diferentes:
En el siguiente ejercicio, vemos que en realidad puede ser beneficioso cambiar el orden de integración para facilitar el cálculo. Volveremos a esta idea varias veces en este capítulo.
Evaluación de una integral iterada de dos maneras
Considera la integral doble $\iint_Rx sen (xy) dA$ sobre la región $R = \{ (x,y) | 0 \le x \le 3, 0 \le y \le 2\}$ ().

Las integrales dobles son muy útiles para encontrar el área de una región delimitada por curvas de funciones. Describimos esta situación con más detalle en la siguiente sección. Sin embargo, si la región es de forma rectangular, podemos encontrar su área integrando la función constante $f (x,y) = 1$ sobre la región $R$.
El área de la región $R$ viene dada por $A (R) = \displaystyle\iint_R1dA$.
Esta definición tiene sentido porque usar $f (x,y) = 1 $ y evaluar la integral lo convierten en un producto de largo y ancho. Veamos esta fórmula con un ejemplo y veamos cómo funciona.
Encontrar el área usando una integral doble
Encuentra el área de la región $R = \{ (x,y) | 0 \le x \le 3, 0 \le y \le 2\}$ utilizando una integral doble, es decir, integrando $1$ sobre la región $R$.
Ya hemos visto cómo se pueden usar integrales dobles para encontrar el volumen de un sólido limitado anteriormente por una función $f (x,y)$ sobre una región $R$ proporcionada $f (x,y) \ge 0$ para todos los $(x,y)$ en $R$. Aquí hay otro ejemplo para ilustrar este concepto.
Volumen de un paraboloide elíptico
Encuentra el volumen $V$ del sólido $S$ que está limitado por el paraboloide elíptico $2x^2 + y^2 + z = 27$, los planos $x = 3$ e $y = 3$, y los tres planos de coordenadas.
Recuerda que definimos el valor promedio de una función de una variable en un intervalo $[a, b]$ como
$$f_{\text{prom}} = \frac{1}{b-a} \int_a^bf(x)dx$$De manera similar, podemos definir el valor promedio de una función de dos variables sobre una región $R$. La principal diferencia es que dividimos por un área en lugar del ancho de un intervalo.
El valor promedio de una función de dos variables sobre una región $R$ es
$$f_{\text{prom}} = \frac{1}{\text{Área }R}\iint_Rf(x,y)dA$$En el siguiente ejercicio, encontramos el valor promedio de una función sobre una región rectangular. Este es un buen ejemplo de cómo obtener información útil para una integración haciendo mediciones individuales en una cuadrícula, en lugar de tratar de encontrar una expresión algebraica para una función.
Cálculo de la precipitación pluvial promedio
El mapa del tiempo en la muestra un sistema de tormenta inusualmente húmedo asociado con los restos del huracán Karl, que arrojó $4-8$ pulgadas $(100-200 mm)$ de lluvia en algunas partes del Medio Oeste del 22 al 23 de septiembre de $2010$. El área de precipitaciones medidas $300$ millas de este a oeste y $250$ millas de norte a sur. Estima la precipitación promedio en toda el área en esos dos días.
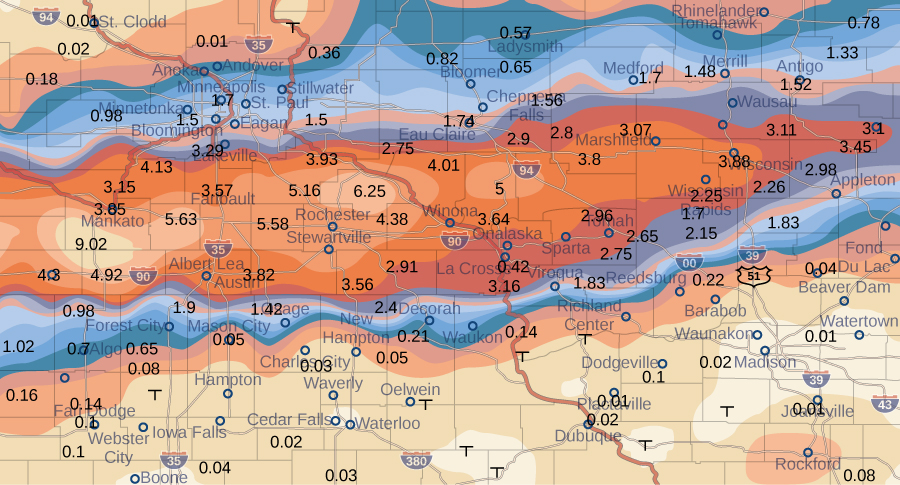
En los siguientes ejercicios, usa la regla del punto medio con $m = 4$ y $n = 2$ para estimar el volumen del sólido delimitado por la superficie $z = f(x,y)$, los planos verticales $x = 1, x = 2, y = 1$, y $y = 2$, y el plano horizontal $z = 0$.
En los siguientes ejercicios, calcula el volumen del sólido debajo de la superficie $z = f(x,y)$ y arriba de la región rectangular $R$ usando una suma de Riemann con $m = n = 2$, los puntos de muestra son las esquinas inferiores izquierdas de los subrectángulos de la partición.
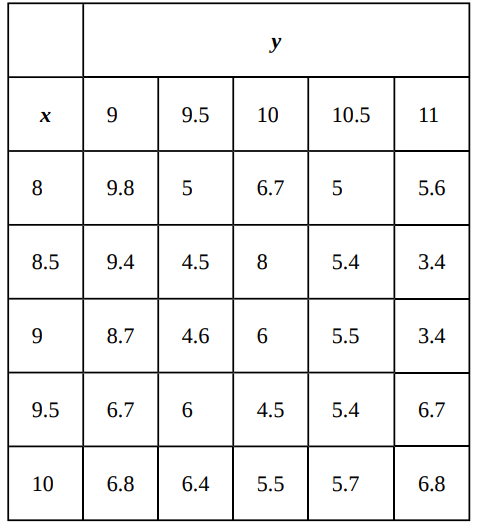


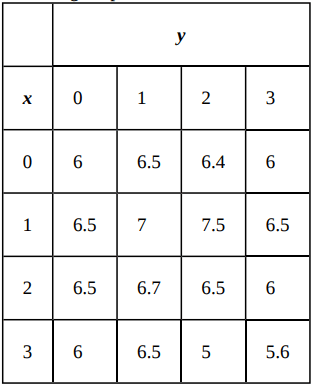

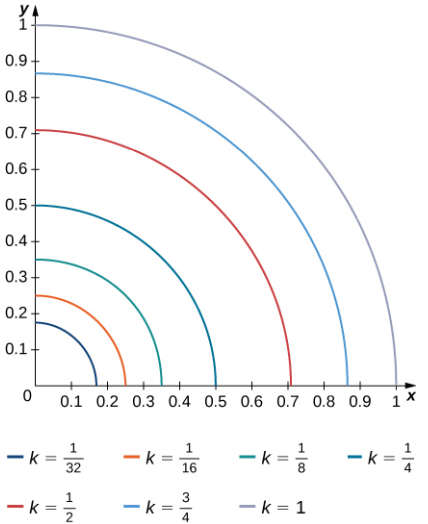

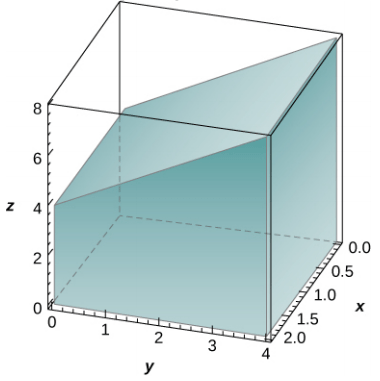
En los siguientes ejercicios, calcula las integrales intercambiando el orden de integración.
En los siguientes ejercicios, calcula las integrales intercambiando el orden de integración.
En los siguientes ejercicios, encuentra el valor promedio de la función sobre los rectángulos dados.
En los siguientes ejercicios, usa la propiedad $v$. Obtén integrales dobles y la respuesta del ejercicio anterior para mostrar que las siguientes desigualdades son verdaderas
En los siguientes ejercicios, usa la propiedad $v$ de integrales dobles y la respuesta del ejercicio anterior para mostrar que las siguientes desigualdades son verdaderas.
En los siguientes ejercicios, la función $f$ se da en términos de integrales dobles.
En los siguientes ejercicios, se dan las funciones $f_n$, donde $n \ge 1$ es un número natural.
$f_{prom} \approx \frac{1}{mn}\sum_{i=1}^m\sum_{j=1}^nf\big(x_{ij}^*, y_{ij}^*\big)$, donde $\big(x_{ij}^*, y_{ij}^*\big)$ son los puntos de muestra de la partición de $R$, donde $1 \le i \le m$ y $1 \le j \le n$

En Integrales dobles sobre regiones rectangulares, estudiamos el concepto de integrales dobles y examinamos las herramientas necesarias para calcularlas. Aprendimos técnicas y propiedades para integrar funciones de dos variables sobre regiones rectangulares. También discutimos varias aplicaciones, como encontrar el volumen limitado anteriormente por una función sobre una región rectangular, encontrar el área por integración y calcular el valor promedio de una función de dos variables.
En esta sección consideramos integrales dobles de funciones definidas sobre una región $D$ general limitada en el plano.
La mayoría de los resultados anteriores también se mantienen en esta situación, pero algunas técnicas deben extenderse para cubrir este caso más general.
En la se muestra un ejemplo de una región $D$ general limitada en un plano. Como $D$ está acotado en el plano, debe existir una región rectangular $R$ en el mismo plano que encierra la región $D$, es decir, existe una región rectangular $R$ tal que $D$ es un subconjunto de $R (D \sube R)$.
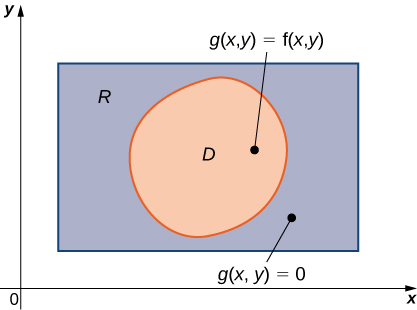
Supón que $z = f(x,y)$ se define en una región planar $D$ limitada general como en la . Para desarrollar integrales dobles de $f$ sobre $D$, ampliamos la definición de la función para incluir todos los puntos en la región rectangular $R$ y luego usamos los conceptos y herramientas de la sección anterior.
Pero, ¿cómo ampliamos la definición de $f$ para incluir todos los puntos en $R$? Hacemos esto definiendo una nueva función $g (x,y)$ en $R$ de la siguiente manera:
$$g(x,y) = \begin{cases} f(x,y) \text{ si } (x,y)∈ D\\ 0 \text{ si } (x,y)∈ R \text{ y } \cancel{∈} D \end{cases}$$Ten en cuenta que podríamos tener algunas dificultades técnicas si el límite de $D$ es complicado. Por lo tanto, suponemos que el límite es una curva cerrada simple, suave y continua por partes. Además, dado que todos los resultados desarrollados en integrales dobles sobre regiones rectangulares utilizaron una función integrable $f (x,y)$, debemos tener cuidado con $g (x,y)$ y verificar que $g (x,y)$ sea una función integrable sobre la región rectangular $R$.
Esto sucede siempre que la región $D$ esté limitada por simples curvas cerradas. Por ahora nos concentraremos en las descripciones de las regiones en lugar de la función y ampliaremos nuestra teoría adecuadamente para la integración.
Consideramos dos tipos de regiones limitadas planas.
Una región $D$ en el plano $xy$ es de Tipo II si se encuentra entre dos líneas horizontales y las gráficas de dos funciones continuas $h_1 (y)$ y $h_2 (y)$. Es decir (),
$$D = \{ (x,y)|c \le y \le d, h_1(y) \le x \le h_2(y)\}$$
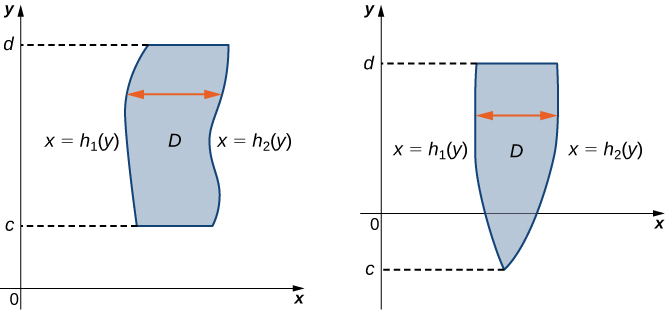
Describiendo una región como Tipo I y también como Tipo II
Considera la región en el primer cuadrante entre las funciones $y = \sqrt{x}$ e $y = x^3$ (). Describe la región primero como Tipo I y luego como Tipo II.
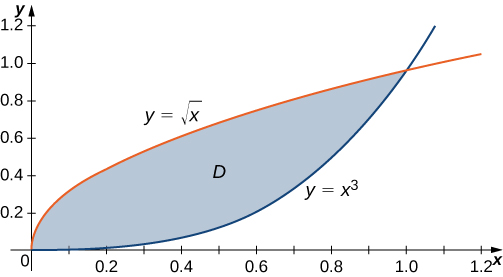
Para desarrollar el concepto y las herramientas para la evaluación de una integral doble sobre una región general no rectangular, primero debemos entender la región y poder expresarla como Tipo I o Tipo II o una combinación de ambas. Sin comprender las regiones, no podremos decidir los límites de las integraciones en integrales dobles. Como primer paso, veamos el siguiente teorema
Integrales dobles sobre regiones no rectangulares
Supón que $g (x,y)$ es la extensión al rectángulo $R$ de la función $f (x,y)$ definida en las regiones $D$ y $R$ como se muestra en la dentro de $R$. Entonces $g (x,y)$ es integrable y definimos la integral doble de $f (x,y)$ sobre $D$ por
$$\iint_D f(x,y) = \iint_R g(x,y)$$El lado derecho de esta ecuación es lo que hemos visto antes, por lo que este teorema es razonable porque $R$ es un rectángulo y $\iint_R g (x,y) dA$ se discutió en la sección anterior. Además, la igualdad funciona porque los valores de $g (x,y)$ son $0$ para cualquier punto $(x,y)$ que se encuentre fuera de $D$ y, por lo tanto, estos puntos no agregan nada a la integral. Sin embargo, es importante que el rectángulo $R$ contenga la región $D$.
De hecho, si la región $D$ está limitada por curvas suaves en un plano y podemos describirla como Tipo I o Tipo II o una combinación de ambas, entonces podemos usar el siguiente teorema y no tener que encontrar un rectángulo $R$ que contiene la región.
Teorema de Fubini (forma fuerte)
Para una función $f (x,y)$ que es continua en una región $D$ de Tipo I, tenemos
$$\iint_D f(x,y)dA = \iint_D (f(x,y)dydx \\ =\int_a^b\bigg[\int_{g_1(x)}^{g_2(x)} f(x,y)dy\bigg]dx \tag{$5.5$}$$De manera similar, para una función $f (x,y)$ que es continua en una región $D$ del tipo II, tenemos
$$\iint_D f(x,y)dA = \iint_D (f(x,y)dxdy \\ =\int_c^d\bigg[\int_{h_1(y)}^{h_2(y)} f(x,y)dx\bigg]dy \tag{$5.6$}$$La integral en cada una de estas expresiones es una integral iterada, similar a las que hemos visto antes. Observa que, en la integral interna de la primera expresión, integramos $f (x,y)$ con $x$ siendo constante y los límites de integración son $g_1 (x)$ y $g_2 (x)$. En la integral interna en la segunda expresión, integramos $f (x,y)$ con $y $siendo constante y los límites de integración son $h_1 (y)$ y $h2 (y)$.
Evaluación de una integral iterada sobre una región tipo I
Evalúa la integral $\iint_D x^2e^{xy} dA$ donde $D$ se muestra en la ().
En el ejercicio anterior, podríamos haber observado la región de otra manera, como $D = \{ (x,y) | 0 \le y \le 1, 0 \le x \le 2y\}$ ().

Esta es una región Tipo II y la integral se vería así
$$\iint_D x^2e^{xy}dA = \int_{y=0}^{y=1}\int_{x=0}^{x=2y}x^2e^{xy}dxdy$$Sin embargo, si integramos primero con respecto a $x$, esta integral es larga de calcular porque tenemos que usar la integración por partes dos veces.
Evaluación de una integral iterada sobre una región tipo II
Evalúa la integral $\iint_D \big(3x^2 + y^2\big)dA$, donde $D = \{ (x,y)| - 2 \le y \le 3, y^2 - 3 \le x \le y + 3\}$.
Recordemos desde las integrales dobles sobre las regiones rectangulares las propiedades de las integrales dobles. Como hemos visto en los ejercicios aquí, todas estas propiedades también son válidas para una función definida en una región limitada no rectangular en un plano.
En particular, la propiedad 3 establece:
Si $R = S \cup T$ y $S \cap T = \empty$ excepto en sus límites, entonces
$$\iint_R f(x,y)dA = \iint_S f(x,y)dA + \iint_T f(x,y)dA$$Del mismo modo, tenemos la siguiente propiedad de integrales dobles sobre una región limitada no rectangular en un plano
Regiones descompuestas en regiones más pequeñas
Supón que la región $D$ puede expresarse como $D = D_1 \cup D_2$ donde $D_1$ y $D_2$ no se solapan excepto en sus límites. Luego
Este teorema es particularmente útil para regiones no rectangulares porque nos permite dividir una región en una unión de regiones de Tipo I y Tipo II. Entonces podemos calcular la integral doble en cada pieza de una manera conveniente, como en el siguiente ejercicio.
Descomposición de regiones
Expresa la región $D$ que se muestra en la como una unión de regiones de Tipo I o Tipo II, y evalúa la integral
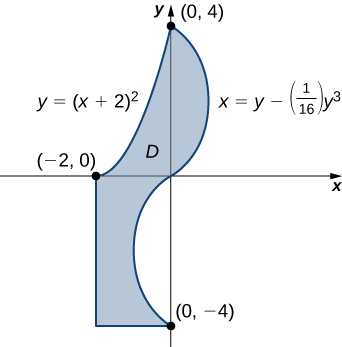
Como ya hemos visto, cuando evaluamos una integral iterada, a veces un orden de integración conduce a un cálculo que es significativamente más simple que el otro orden de integración. A veces, el orden de integración no importa, pero es importante aprender a reconocer cuándo un cambio en el orden simplificará nuestro trabajo.
Inicialmente, interactúa con la siguiente escena interactiva diseñada en GeoGebra por Kristen Beck, intercambiando el orden de integración:
A continuación, observa el siguiente ejercicio (puedes usar la escena anterior cambiando la función, pero en lugar de $e$, usa $2.7182$:
Cambiando el orden de integración
Invierte el orden de integración en la integral iterada $\int_{x=0}^{x=\sqrt{2}}\int_{y=0}^{y=2-x^2} xe^{x^2}dydx$. Luego evalúa la nueva integral iterada.
Ahora, observa este otro ejercicio:
Evaluación de una integral iterada invirtiendo el orden de integración
Considera la integral iterada $\int_Rf (x,y) dx dy$ donde $z = f(x,y) = x - 2y$ sobre una región triangular $R$ que tiene lados en $x = 0, y = 0$, y la línea $x + y = 1$. Dibuja la región y luego evalúa la integral iterada por
En la siguiente escena interactiva diseñada por Elena Álvarez, se muestran ejemplos del cálculo de integrales dobles de funciones de dos variables definidas sobre dominios regulares, esto es, dominios que son verticalmente simples (barridos por franjas verticales) u horizontalmente simples (barridos por franjas horizontales). La función la hemos modificado, de acuerdo al ejercicio anterior.
Elegido el ejemplo, la escena permite representar las curvas que lo delimitan y describir el dominio como región horizontal o verticalmente simple.
Pulsando el botón Ver se muestra para cada ejemplo, la descripción del dominio según el tipo de franja elegida.
Pulsando sobre el botón Calcular se plantea la integral doble como integrales iteradas (los cálculos de las integrales se hacen a través de una comunicación entre DescartesJS y GeoGebra).
En el siguiente vídeo, puedes observar cómo se interactúa con la escena.
Podemos usar integrales dobles sobre regiones generales para calcular volúmenes, áreas y valores promedio.
Los métodos son los mismos que los de integrales dobles sobre regiones rectangulares, pero sin la restricción de una región rectangular, ahora podemos resolver una variedad más amplia de problemas.
Encontrar el volumen de un tetraedro
Encuentra el volumen del sólido delimitado por los planos $x = 0, y = 0, z = 0$ y $2x + 3y + z = 6$
Encontrar el área de una región rectangular es fácil, pero encontrar el área de una región no rectangular no es tan fácil. Como hemos visto, podemos usar integrales dobles para encontrar un área rectangular. De hecho, esto es muy útil para encontrar el área de una región general no rectangular, como se indica en la siguiente definición.
El área de una región delimitada por un plano $D$ se define como la integral doble $\displaystyle\iint_D1dA$
Ya hemos visto cómo encontrar áreas en términos de integración única. Aquí estamos viendo otra forma de encontrar áreas mediante el uso de integrales dobles, que pueden ser muy útiles, como veremos en las secciones posteriores de este capítulo.
Encontrar el área de una región
Encuentra el área de la región limitada a continuación por la curva $y = x^2$ y arriba por la línea $y = 2x$ en el primer cuadrante ().
También podemos usar una integral doble para encontrar el valor promedio de una función sobre una región general. La definición es una extensión directa de la fórmula anterior.
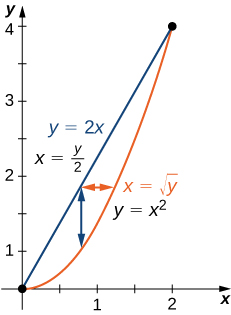
Si $f (x,y)$ es integrable sobre una región $D$ limitada por el plano con área positiva $A (D)$, entonces el valor promedio de la función es
$$f_{prom} = \frac{1}{A(D)}\iint_D f(x,y)dA$$Ten en cuenta que el área es $A (D) = \iint_D1dA$
Encontrar un valor promedio
Encuentra el valor promedio de $f (x,y) = 7xy^2$ en la región limitada por la línea $x = y$ y la curva $x = \sqrt{y}$ ().

Una integral doble impropia es una integral $iint_Df dA$ donde $D$ es una región ilimitada o $f$ es una función ilimitada. Por ejemplo, $D = \{ (x,y) || x - y | \ge 2\}$ es una región ilimitada, y la función $f (x,y) = 1/(1 - x^2 - 2y^2$ sobre la elipse $x^2 + 3y^2 \le 1$ es una función ilimitada. Por lo tanto, las dos integrales siguientes son integrales impropias:
En esta sección, nos gustaría tratar con integrales impropias de funciones sobre rectángulos o regiones simples, de modo que $f$ solo tenga muchas discontinuidades finitas. No todas esas integrales impropias pueden ser evaluadas; sin embargo, una forma del teorema de Fubini se aplica a algunos tipos de integrales impropias.
Teorema de Fubini para integrales impropias
Si $D$ es un rectángulo acotado o una región simple en el plano definido por $\{ (x,y): a \le x \le b, g (x) \le y \le h (x)\}$ y también por $\{ (x,y): c \le y \le d, j (y) \le x \le k (y)\}$ y $f$ es una función no negativa en $D$ con finitas discontinuidades en el interior de $D$, entonces
$$\int_DfdA = \int_{x=a}^{x=b}\int_{y=g(x)}^{y=h(x)}f(x,y)dydx \\= \int_{y=c}^{y=d}\int_{x=j(y)}^{x=k(y)}f(x,y)dxdy$$Es muy importante tener en cuenta que requerimos que la función no sea negativa en $D$ para que el teorema funcione. Consideramos solo el caso en el que la función tiene muchas discontinuidades dentro de $D$.
Evaluación de una integral doble impropia
Considera la función $f (x,y) = \frac{e^y}{y}$ sobre la región $D = \{ (x,y): 0 \le x \le 1, x \le y \le x$.
Observa que la función no es negativa y es continua en todos los puntos de $D$ excepto en $(0, 0)$. Usa el teorema de Fubini para evaluar la integral impropia.
Como se mencionó anteriormente, también tenemos una integral impropia si la región de integración no tiene límites. Supongamos ahora que la función $f$ es continua en un rectángulo ilimitado $R$.
Integrales impropias en una región ilimitada
Si $R$ es un rectángulo ilimitado como $R = \{ (x,y): \le x \le \infin, c \le y \le \infin\}$, entonces cuando existe el límite, tenemos
$$\iint_Rf(x,y)dA = \lim\limits_{(b, d) \to (\infin, \infin)}\int_a^b\bigg(\int_c^df(x,y)dy\bigg)dx\\ = \lim\limits_{(b, d) \to (\infin, \infin)}\int_c^d\bigg(\int_a^bf(x,y)dy\bigg)dy$$El siguiente ejercicio muestra cómo se puede usar este teorema en ciertos casos de integrales impropias.
Evaluación de una integral doble impropia
Evalúa la integral $\iint_Rxye^{-x^2-y^2}dA$, donde $R$ está en el primer cuadrante del plano.
En algunas situaciones en la teoría de la probabilidad, podemos obtener información sobre un problema cuando podemos utilizar integrales dobles sobre regiones generales. Antes de repasar un ejercicio con una integral doble, necesitamos establecer algunas definiciones y familiarizarnos con algunas propiedades importantes.
Considera un par de variables aleatorias continuas $X$ e $Y$, como los cumpleaños de dos personas o la cantidad de días soleados y lluviosos en un mes. La función de densidad conjunta $f$ de $X$ e $Y$ satisface la probabilidad de que $(X,Y)$ se encuentre en una determinada región $D$:
$$P((X,Y) ∈ D) = \iint_Df(x,y)dA$$Dado que las probabilidades nunca pueden ser negativas y deben estar entre $0$ y $1$, la función de densidad conjunta satisface la siguiente desigualdad y ecuación:
$$f(x,y) \ge 0\;\;\;\text{y}\;\;\;\iint_{R^2}f(x,y)dA = 1$$Se dice que las variables $X$ e $Y$ son variables aleatorias independientes si su función de densidad conjunta es el producto de sus funciones de densidad individuales:
$$f(x,y) = f_1(x)f_2(y)$$
Aplicación a la probabilidad
En el restaurante de Sydney, los clientes deben esperar un promedio de $15$ minutos por una mesa. Desde el momento en que se sientan hasta que terminan su comida, se requieren $40$ minutos adicionales, en promedio. ¿Cuál es la probabilidad de que un cliente pase menos de una hora y media en el restaurante, suponiendo que esperar una mesa y completar la comida son eventos independientes?
Otra aplicación importante en la probabilidad que puede involucrar integrales dobles impropias es el cálculo de los valores esperados. Primero definimos este concepto y luego mostramos un ejemplo de cálculo.
En la teoría de probabilidad, denotamos los valores esperados $E (X)$ y $E (Y)$, respectivamente, como los resultados más probables de los eventos. Los valores esperados $E (X)$ y $E (Y)$ están dados por
$$E(X) = \iint_Sxf(x,y)DA\;\;\text{y}\;\;E(Y) = \iint_Sy(f(x,y)dA$$donde $S$ es el espacio muestral de las variables aleatorias $X$ e $Y$
Encontrar el valor esperado
Encuentra el tiempo esperado para los eventos "esperando una mesa" y "completando la comida" en el ejercicio anterior.
En los siguientes ejercicios, especifique si la región es de Tipo I o Tipo II.
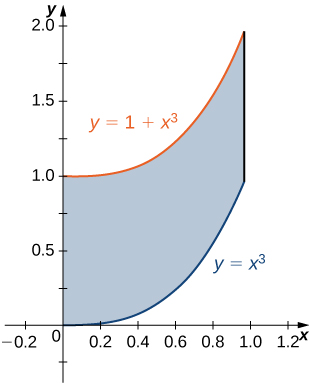
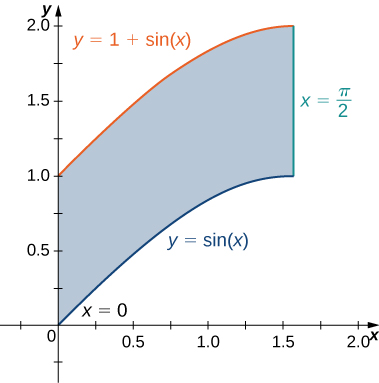

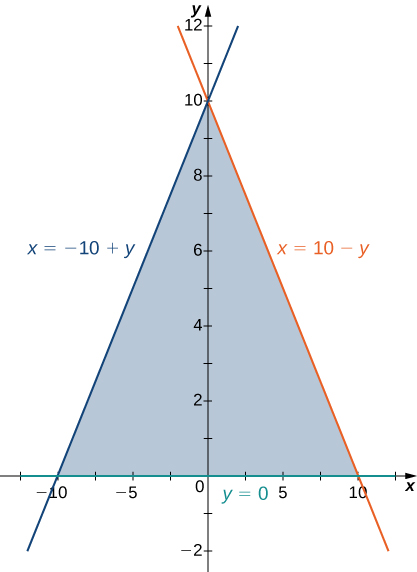

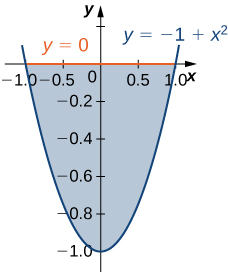
En los siguientes ejercicios, evalúa la integral doble $\iint_Df (x,y) dA$ sobre la región $D$.
Evalúa las integrales iteradas.
$\displaystyle\iint_Dy^2dA = \int_{-1}^0\int_{-x}^{2-x^2}y^2dydx + \int_0^1\int_{x}^{2-x^2}y^2dydx$ dividiendo la región $D$ en dos regiones de Tipo I, donde $D=\{ (x,y)|y\ge x, y\ge -x, y\le 2-x^2\}$
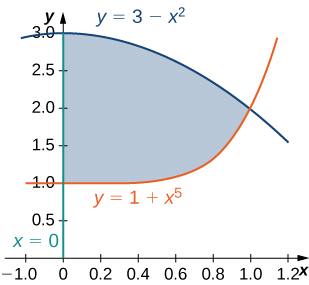

En los siguientes ejercicios, cambia el orden de integración y evalúa la integral.
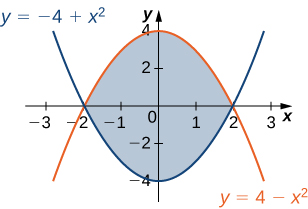


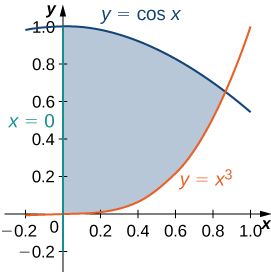
Supón que un punto $(X,Y)$ se elige arbitrariamente en el cuadrado $[0, 3] × [0, 3]$ con la densidad de probabilidad
$$p(x,y) = \begin{cases} \frac19 &(x,y) ∈ [0, 3] × [0, 3] \\ 0 &\text{si no pertenece} \end{cases}$$Encuentra la probabilidad de que el punto $(X,Y)$ esté dentro del cuadrado de la unidad e interpreta el resultado.
y
$$p_2(y) = \begin{cases} \frac15e^{-y/5} & y\ge 0 \\ 0 &\text{otro caso} \end{cases}$$respectivamente, la probabilidad de que un cliente pase menos de $6$ minutos en la línea de autoservicio viene dada por $P [X + Y \le 6] = \iint_Dp (x,y) dx dy$, donde $D = \{ (x,y) | x \ge 0, y \ge 0, x + y \le 6\}$. Encuentra $P [X + Y \le 6]$ e interpreta el resultado (Solución).
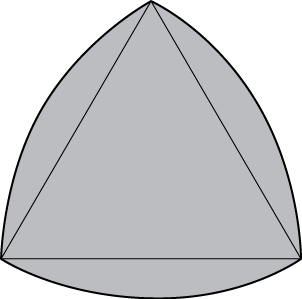
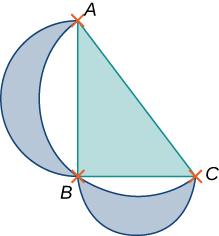
Las integrales dobles a veces son mucho más fáciles de evaluar si cambiamos las coordenadas rectangulares a coordenadas polares. Sin embargo, antes de describir cómo hacer este cambio, necesitamos establecer el concepto de una integral doble en una región rectangular polar.
Cuando definimos la integral doble para una función continua en coordenadas rectangulares, por ejemplo, $g$ sobre una región $R$ en el plano $xy$, dividimos $R$ en subrectángulos con lados paralelos a los ejes de coordenadas. Estos lados tienen valores $x$ constantes y/o valores $y$ constantes. En coordenadas polares, la forma con la que trabajamos es un rectángulo polar, cuyos lados tienen valores $r$ constantes y/o valores $θ$ constantes. Esto significa que podemos describir un rectángulo polar como en la ( (a)), con $R = \{ (r, θ) | a \le r \le b, α \le θ \le β\}$.
En esta sección, buscamos integrar sobre rectángulos polares. Considera una función $f (r, θ)$ sobre un rectángulo polar $R$. Dividimos el intervalo $[a, b]$ en $m$ subintervalos $[r_{i - 1}, r_i]$ de longitud $Δ r = (b - a) / m$ y dividimos el intervalo $[α, β]$ en $n$ subintervalos $[θ_{i - 1}, θ_i]$ de ancho $Δ θ = (β - α) / n$. Esto significa que los círculos $r = r_i$ y los rayos $θ = θ_i$ para $1 \le i \le m$ y $1 \le j \le n$ dividen el rectángulo polar $R$ en subrectángulos polares más pequeños $R_{ij}$ ( (b)).
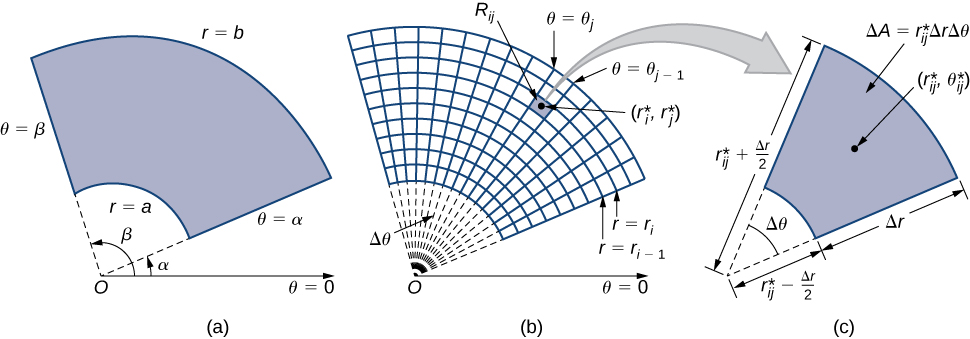
Como antes, necesitamos encontrar el área $Δ A$ del subrectángulo polar $R_{ij}$ y el volumen “polar” de la caja delgada sobre $R_{ij}$. Recuerda que, en un círculo de radio $r$, la longitud $s$ de un arco subtendido por un ángulo central de $θ$ radianes es $s = rθ$. Observa que el rectángulo polar $R_{ij}$ se parece mucho a un trapezoide con lados paralelos $r_{i - 1}Δ θ$ y $r_i Δ θ$ y con un ancho $Δ r$. Por tanto, el área del subrectángulo polar $R_{ij}$ es
$$Δ A = \frac12 Δ r(r_{i - 1}Δ θ + r_1Δ θ)$$Simplificando y dejando $r_{ij}^* = \frac12 (r_{i - 1} + r_i)$, tenemos $Δ A = r_{ij}^*Δ rΔ θ$. Por lo tanto, el volumen polar de la caja delgada sobre $R_{ij}$ se muestra en la .
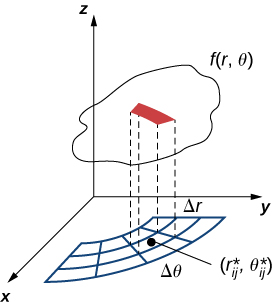
Usando la misma idea para todos los subrectángulos y sumando los volúmenes de las cajas rectangulares, obtenemos una suma doble de Riemann como
$$\sum_{i=1}^m\sum_{j=1}^n f(r_{ij}^*, θ_{ij}^*)r_{ij}^*Δ rΔθ$$Como hemos visto antes, obtenemos una mejor aproximación al volumen polar del sólido por encima de la región $R$ cuando dejamos que $m$ y $n$ se hagan más grandes. Por lo tanto, definimos el volumen polar como el límite de la suma doble de Riemann
$$V = \lim\limits_{m,n \to \infin}\sum_{i=1}^m\sum_{j=1}^n f(r_{ij}^*, θ_{ij}^*)r_{ij}^*Δ rΔθ$$Esto se convierte en la expresión de la integral doble.
La integral doble de la función $f (r, θ)$ sobre la región polar $R$ en el plano $rθ$ se define como
$$\iint_Rf (r, θ)dA = \lim\limits_{m,n \to \infin}\sum_{i=1}^m\sum_{j=1}^n f(r_{ij}^*, θ_{ij}^*)Δ A \\= \lim\limits_{m,n \to \infin}\sum_{i=1}^m\sum_{j=1}^n f(r_{ij}^*, θ_{ij}^*)r_{ij}^*Δ rΔθ\tag{$5.8$}$$Nuevamente, al igual que en las integrales dobles sobre regiones rectangulares, la integral doble sobre una región rectangular polar puede expresarse como una integral iterada en coordenadas polares. Por lo tanto,
$$\iint_Rf (r, θ)dA = \iint_Rf(r, θ)r dr dθ = \int_{θ = α}^{θ = β}\int_{r=a}^{r=b}f(r, θ)r dr dθ$$Observa que la expresión para $dA$ se reemplaza por $r dr dθ$ cuando se trabaja en coordenadas polares. Otra forma de ver la integral doble polar es cambiar la integral doble en coordenadas rectangulares por sustitución. Cuando la función $f$ se da en términos de $x$ e $y$, usando $x = r cos θ, y = r sen θ$, y $dA = r dr dθ$ la cambia a
$$\iint_Rf (x,y)dA = \iint_R f(r cos θ, r sen θ)r dr dθ$$Ten en cuenta que todas las propiedades enumeradas en Integrales dobles sobre regiones rectangulares para la integral doble en coordenadas rectangulares también son válidas para la integral doble en coordenadas polares, por lo que podemos usarlas sin dudarlo.
Dibujar una región polar
Dibuja la región rectangular polar $R = \{ (r, θ) | 1 \le r \le 3, 0 \le θ \le π\}$.
Ahora que hemos esbozado una región polar, demostremos cómo evaluar una integral doble sobre esta región mediante el uso de coordenadas polares.
Evaluación de una integral doble sobre una región polar
Evalúa la integral $\displaystyle\iint_R3x dA$ sobre la región $R = \{ (r, θ)|1 \le r ≤ 2, 0 \le θ \le π\}$.
Evaluación de una integral doble mediante la conversión de coordenadas rectangulares
Evalúa la integral $\displaystyle\iint_R(1 - x^2 - y^2)dA$ donde $R$ es el círculo unitario en el plano $xy$.
Evaluación de una integral doble mediante la conversión de coordenadas rectangulares
Evalúa la integral $\displaystyle\iint_R (x + y) dA$ donde $R = \{ (x,y) | 1 \le x^2 + y^2 \le 4, x \le 0\}$
Para evaluar la integral doble de una función continua mediante integrales iteradas sobre regiones polares generales, consideramos dos tipos de regiones, análogas a Tipo I y Tipo II como se discutió para coordenadas rectangulares en Integrales dobles sobre regiones generales.
Es más común escribir ecuaciones polares como $r = f(θ)$ que $θ = f(r)$, por lo que describimos una región polar general como $R = \{ (r, θ) | α \le θ \le β, h_1 (θ) \le r \le h_2 (θ)$ (ver la siguiente figura).

Integrales dobles sobre regiones polares generales
Si $f (r, θ)$ es continua en una región polar general $D$ como se describió anteriormente, entonces
$$\int_f(r, θ)r dr dθ = \int_{θ = α}^{θ = β}\int_{r=h_1(θ)}^{r=h_2(θ)}f(r, θ)r dr dθ\tag{$5.9$}$$
Evaluación de una integral doble sobre una región polar general
Evalúa la integral $\displaystyle\iint_D r^2sen θ r dr dθ$ donde $D$ es la región limitada por el eje polar y la mitad superior del cardioide $r = 1 + cos θ$.
Terminamos este apartado con una escena interactiva diseñada por Elena Álvarez. En esta escena se muestran ejemplos del cálculo de integrales dobles de funciones de dos variables definidas sobre dominios que pueden expresarse utilizando coordenadas polares (observa, inicialmente, el vídeo de cómo se puede interactuar).
Como en las coordenadas rectangulares, si un sólido $S$ está limitado por la superficie $z = f(r, θ)$, así como por las superficies $r = a, r = b, θ = α$ y $θ = β$, podemos encontrar el volumen $V$ de $S$ por doble integración, como
$$V = \iint_Rf(r, θ)r dr dθ = \int_{θ = α}^{θ = β}\int_{r=a}^{r=b}f(r, θ)r dr dθ$$Si la base del sólido se puede describir como $D = \{ (r, θ) | α \le θ \le β, h_1 (θ) \le r\le h_2 (θ)$, entonces la integral doble para el volumen se convierte en
Ilustramos esta idea con algunos ejercicios.
Encontrar un volumen usando una integral doble
Encuentra el volumen del sólido que se encuentra debajo del paraboloide $z = 1 - x^2 - y^2$ y arriba del círculo unitario en el plano $xy$ (vea la siguiente figura).

Encontrar un volumen usando una integral doble
Encuentra el volumen del sólido que se encuentra debajo del paraboloide $z = 4 - x^2 - y^2$ y arriba del disco $(x - 1)^2 + y^2 = 1$ en el plano $xy$. Observa el paraboloide en la intersectando el cilindro $(x - 1)^2 + y^2 = 1$ arriba del plano $xy$.
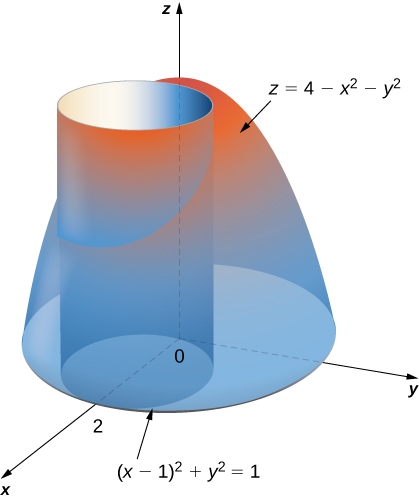
Observa en el siguiente ejercicio que la integración no siempre es fácil con coordenadas polares. La complejidad de la integración depende de la función y también de la región sobre la que necesitamos realizar la integración. Si la región tiene una expresión más natural en coordenadas polares o si $f$ tiene una antiderivada más simple en coordenadas polares, entonces el cambio en las coordenadas polares es apropiado; de lo contrario, usa coordenadas rectangulares.
Encontrar un volumen usando una integral doble
Encuentra el volumen de la región que se encuentra debajo del paraboloide $z = x^2 + y^2$ y encima del triángulo encerrado por las líneas $y = x, x = 0$ y $x + y = 2$ en el plano $xy$.
Para responder a la pregunta de cómo se encuentran las fórmulas para los volúmenes de diferentes sólidos estándar, como una esfera, un cono o un cilindro, queremos demostrar un ejemplo y encontrar el volumen de un cono arbitrario.
Encontrar un volumen usando una integral doble
Usa coordenadas polares para encontrar el volumen dentro del cono $z = 2 - x^2 + y^2$ y arriba del plano $xy$.
Al igual que con las coordenadas rectangulares, también podemos usar coordenadas polares para encontrar áreas de ciertas regiones usando una integral doble. Como antes, necesitamos entender la región cuya área queremos calcular. Dibujar un gráfico e identificar la región puede ser útil para darte cuenta de los límites de la integración. En general, la fórmula del área en doble integración se verá como
$$\text{Área } A = \int_{α}^{β}\int_{h1(θ)}^{h2(θ)}1rdrdθ$$
Encontrar un área usando una integral doble en coordenadas polares
Evalúa el área delimitada por la curva $r = cos 4θ.$
Encontrar el área entre dos curvas polares
Encuentra el área encerrada por el círculo $r = 3 cos θ$ y el cardioide $r = 1 + cos θ$.
Evaluación de una integral doble impropia en coordenadas polares
Evalúa la integral $\displaystyle\iint_{R^2}e^{-10\big(x^2+y^2\big)}dxdy$
En los siguientes ejercicios, exprese la región $D$ en coordenadas polares.
En los siguientes ejercicios, se muestra la gráfica de la región polar $D$. Expresa $D$ en coordenadas polares.




En los siguientes ejercicios, evalúa la integral doble $\displaystyle\iint_Rf (x,y) dA$ sobre la región rectangular polar $D$.
$D = \{ (r, θ)|3 \le r \le 4, \frac{π}{3} \le θ \le \frac{2π}{3}\}$ (Solución)
$D = \{ (r, θ)|1 \le r \le 2, \frac{π}{6} \le θ \le \frac{π}{3}\}$
$D = \{ (r, θ)|1 \le r \le 2, \frac{π}{6} \le θ \le \frac{π}{3}\}$
$D = \{ (r, θ)|1 \le r \le 2, \frac{π}{4} \le θ \le \frac{π}{3}\}$ (Solución)
En los siguientes ejercicios, las integrales se han convertido a coordenadas polares. Verifica que las identidades sean verdaderas y elige la forma más fácil de evaluar las integrales, en coordenadas rectangulares o polares.
En los siguientes ejercicios, convierte las integrales a coordenadas polares y evalúalas.
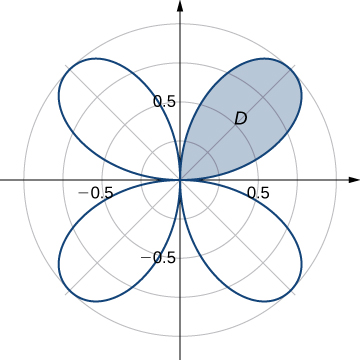
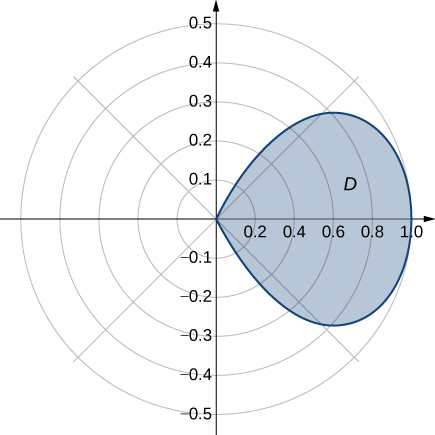
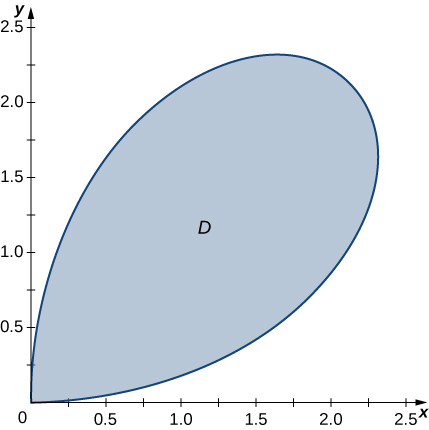
Para los dos ejercicios siguientes, considera un anillo esférico, que es una esfera con un orificio cilíndrico cortado de modo que el eje del cilindro pase por el centro de la esfera (consulte la siguiente figura).

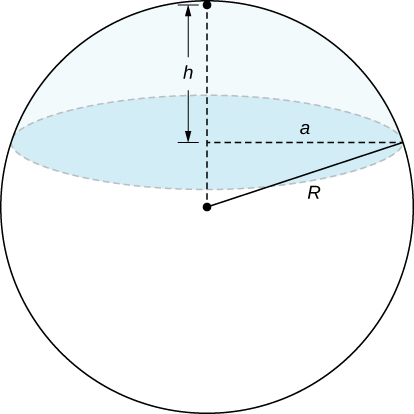
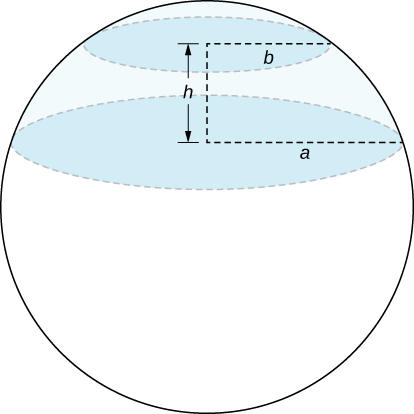
Supón que las coordenadas de la pelota se distribuyen normalmente de forma independiente con una media $\mu = 0$ y una desviación estándar de $\sigma$ (en pies). La probabilidad de que la bola se detenga a no más de un pie del origen está dada por $P[X^2 + Y^2]\le a^2] = \iint_Dp (x,y) dy dx$, donde $D$ es el disco de radio $a$ centrado en el origen. Demuestra que $P[X^2 + Y^2\le a^2] = 1 - e^{- a^2 / 2\sigma^2}$.
En Integrales dobles sobre regiones rectangulares, discutimos la integral doble de una función $f (x,y)$ de dos variables sobre una región rectangular en el plano. En esta sección definimos la integral triple de una función $f (x, y, z)$ de tres variables sobre una caja sólida rectangular en el espacio, $ℝ^3$. Más adelante en esta sección ampliamos la definición a regiones más generales en $ℝ^3$.
Podemos definir una caja rectangular $B$ en $ℝ^3$ como $B = \{ (x, y, z) | a \le x \le b, c \le y \le d, e \le z \le f\}$. Seguimos un procedimiento similar al que hicimos en Integrales dobles sobre regiones rectangulares. Dividimos el intervalo $[a, b]$ en $l$ subintervalos $[x_{i - 1}, x_i]$ de igual longitud $\displaystyleΔ x = \frac{x_{i} - x_{i - 1}}{l}$, dividimos el intervalo $[c, d]$ en $m$ subintervalos $[y_{i - 1}, y_i]$ de igual longitud $\displaystyleΔ y = \frac{y_{j} - y_{j - 1}}{m}$, y dividimos el intervalo $[e, f]$ en $n$ subintervalos $[z_{i - 1}, z_i]$ de igual longitud $\displaystyleΔ z = \frac{z_k - z_{k - 1}}{n}$. Luego, la caja rectangular $B$ se subdivide en $lmn$ subcajas $B_{ijk} = [x_{i - 1}, x_i] × [y_{i - 1}, y_i] × [z_{i - 1}, z_i]$, como se muestra en la .
Para cada $i, j$ y $k$, considera un punto de muestra $(x_{ijk}^*, y_{ijk}^*, z_{ijk}^*)$ en cada subcaja $B^{ijk}$. Vemos que su volumen es $Δ V = Δ xΔ yΔ z$. Forma la suma triple de Riemann
$$\sum_{i=1}^l\sum_{j=1}^m\sum_{k=1}^n f(x_{ijk}^*, y_{ijk}^*, z_{ijk}^*)Δ xΔ yΔ z$$
Definimos la integral triple en términos del límite de una suma triple de Riemann, como hicimos para la integral doble en términos de una suma doble de Riemann.
La integral triple de una función $f (x, y, z)$ sobre una caja rectangular $B$ se define como
$$\lim\limits_{l, m, n \to \infin}\sum_{i=1}^l\sum_{j=1}^m\sum_{k=1}^n f(x_{ijk}^*, y_{ijk}^*, z_{ijk}^*)Δ xΔ yΔ z \\= \iiint_B f(x, y, z)dV \tag{$5.10$}$$si este límite existe
Cuando existe la integral triple en $B$, se dice que la función $f (x, y, z)$ es integrable en $B$. Además, la integral triple existe si $f (x, y, z)$ es continua en $B$. Por lo tanto, usaremos funciones continuas para nuestros ejemplos. Sin embargo, la continuidad es suficiente pero no necesaria; en otras palabras, $f$ está limitada a $B$ y es continua excepto posiblemente en el límite de $B$.
El punto de muestra $(x_{ijk}^*, y_{ijk}^*, z_{ijk}^*)$ puede ser cualquier punto de la subcaja rectangular $B_{ijk}$ y todas las propiedades de una integral doble se aplican a una integral triple. Así como la integral doble tiene muchas aplicaciones prácticas, la integral triple también tiene muchas aplicaciones, que discutiremos en secciones posteriores. Ahora que hemos desarrollado el concepto de integral triple, necesitamos saber cómo calcularla. Al igual que en el caso de la integral doble, podemos tener una integral triple iterada y, en consecuencia, existe una versión de la misma de Fubini para integrales triples.
Integrales dobles sobre regiones polares generales
Si $f (x, y, z)$ es continua en una caja rectangular $B = [a, b] × [c, d] × [e, f]$, entonces
$$\iiint_B f(x, y, z)dV = \int_e^f\int_c^d\int_a^bf(x, y, z)dxdydz$$Esta integral también es igual a cualquiera de los otros cinco posibles ordenamientos para la integral triple iterada.
Para los números reales $a, b, c, d, e$ y $f$, la integral triple iterada se puede expresar en seis ordenamientos diferentes:
$\displaystyle\int_e^f\int_c^d\int_a^bf(x, y, z)dxdydz$$$\begin{aligned} &= \int_e^f(\int_c^d(\int_a^bf(x, y, z)dx)dy)dz = \int_c^d(\int_e^f(\int_a^bf(x, y, z)dx)dz)dy\\ &= \int_a^b(\int_e^f(\int_c^df(x, y, z)dy)dz)dx = \int_e^f(\int_a^b(\int_c^df(x, y, z)dy)dx)dz\\ &= \int_c^d(\int_a^b(\int_e^ff(x, y, z)dz)dx)dy = \int_a^b(\int_c^d(\int_e^ff(x, y, z)dz)dy)dx \end{aligned}$$
Para una caja rectangular, el orden de integración no hace ninguna diferencia significativa en el nivel de dificultad en el cálculo. Calculamos integrales triples usando el teorema de Fubini en lugar de usar la definición de suma de Riemann.
Seguimos el orden de integración de la misma manera que lo hicimos para las integrales dobles (es decir, de adentro hacia afuera).
Evaluación de una integral triple
Evalúa la integral triple $\displaystyle\int_{z=0}^{z=1}\int_{y=2}^{y=4}\int_{x=-1}^{x=5}(x + yz^2)dx dy dz$.
Evaluación de una integral triple
Evalúa la integral triple $\iiint_Bx^2yz dV$ donde $B = \{ (x, y, z) | - 2 \le x \le 1, 0 \le y \le 3, 1 \le z \le 5\}$ (ve figura).

Ahora expandimos la definición de integral triple para calcular una integral triple sobre una región acotada más general $E$ en $ℝ^3$. Las regiones delimitadas generales que consideraremos son de tres tipos. Primero, sea $D$ la región acotada que es una proyección de $E$ sobre el plano $xy$. Supón que la región $E$ en $ℝ^3$ tiene la forma
$$E = \{ (x, y, z)|(x,y) ∈ D, u_1(x,y) \le z \le u_2(x,y)\}$$Para dos funciones $z = u_1 (x,y)$ y $z = u_2 (x,y)$, tales que $u_1 (x,y) \le u_2(x,y)$ para todo $(x,y)$ en $D$ como se muestra en la siguiente figura.
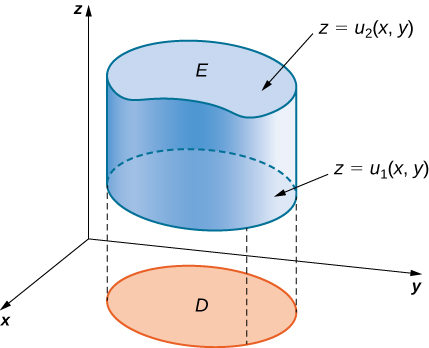
Integral triple sobre una Región General
La integral triple de una función continua f(x, y, z) sobre una región tridimensional general
$$E = \{ (x, y, z)|(x,y) ∈ D, u_1(x,y) \le z \le u_2(x,y)\}$$en $ℝ^3$, donde $D$ es la proyección de $E$ sobre el plano $xy$, es
$$\iiint_Ef(x, y, z)dV = \iint_D\bigg[\int_{u_1(x,y)}^{u_2(x,y)} f(x,y,z)dz\bigg]dA$$De manera similar, podemos considerar una región general limitada $D$ en el plano $xz$ y dos funciones $y = u_1 (x, z)$ e $y = u_2 (x, z)$ tales que $u_1 (x, z) \le u_2 (x, z)$ para todo $(x, z)$ en $D$. Entonces podemos describir la región sólida $E$ en $ℝ^3$ como
$$E = \{ (x, y, z)|(x, z) ∈ D, u_1(x, z) \le y \le u_2(x, z)\}$$donde $D$ es la proyección de $E$ sobre el plano $xz$ y la integral triple es
$$\iiint_Ef(x, y, z)dV = \iint_D\bigg[\int_{u_1(x, z)}^{u_2(x, z)} f(x,y,z)dy\bigg]dA$$Finalmente, si $D$ es una región limitada general en el plano $yz$ y tenemos dos funciones $x = u_1 (y, z)$ y $x = u_2 (y, z)$ tales que $u_1 (y, z) \le u_2 (y, z )$ para todo $(y, z)$ en $D$, entonces la región sólida $E$ en $ℝ^3$ se puede describir como
donde $D$ es la proyección de $E$ sobre el plano $yz$ y la integral triple es
$$\iiint_Ef(x, y, z)dV = \iint_D\bigg[\int_{u_1(y, z)}^{u_2(y, z)} f(x,y,z)dx\bigg]dA$$Observa que la región $D$ en cualquiera de los planos puede ser de Tipo I o Tipo II como se describe en Integrales dobles sobre regiones generales. Si $D$ en el plano $xy$ es de Tipo I (), entonces
$$E = \{ (x, y, z)|a \le x \le b, g_1(x) \le y \le g_2(x), u_1(x,y) \le z \le u_2(x,y)\}$$
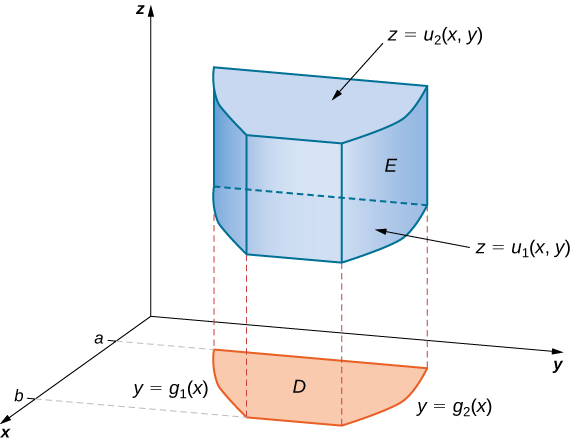
Entonces la integral triple se convierte en
Si $D$ en el plano $xy$ es de Tipo II (), entonces

la integral triple se convierte en
$$\iiint_E f(x,y,z)dV = \int_c^d\int_{h_1(y)}^{h_2(y)}\int_{u_1(x,y)}^{u_2(x,y)}f(x,y,z)dzdxdz$$
Evaluación de una integral triple sobre una región acotada general
Evalúa la integral triple de la función $f (x, y, z) = 5x - 3y$ sobre el tetraedro sólido delimitado por los planos $x = 0, y = 0, z = 0$ y $x + y + z = 1$.
Así como usamos la integral doble $\displaystyle\iint_D1dA$ para encontrar el área de una región general acotada $D$, podemos usar $\displaystyle\iiint_E1dV$ para encontrar el volumen de una región sólida general acotada $E$. El siguiente ejercicio ilustra el método.
Encontrar un volumen mediante la evaluación de una integral triple
Encuentra el volumen de una pirámide recta que tiene la base cuadrada en el plano $xy$ $[-1, 1] × [-1, 1]$ y el vértice en el punto $(0, 0, 1)$ como se muestra en la siguiente figura.
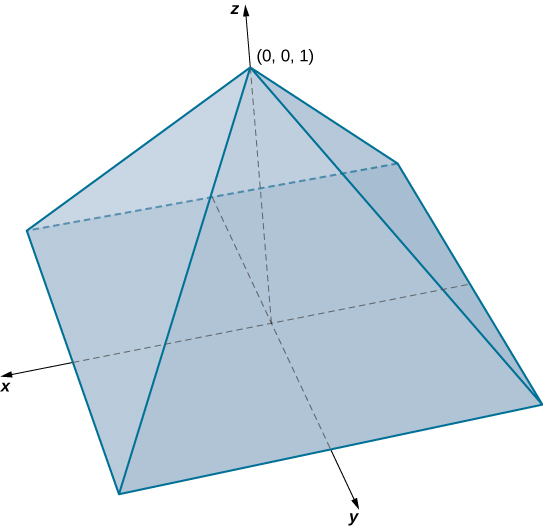
A continuación, interactúa con la siguiente escena interactiva diseñada en GeoGebra por Brian Abbott y Joseph Manthey, en la cual se describen los límites de integración y, además, pulsando los botones, la interpretación gráfica de los mismos.
Una segunda escena interactiva, diseñada también en GeoGebra, muestra la región de integración de una integral triple (de una función arbitraria) en coordenadas rectangulares (para mostrar una región que cubre un área grande sobre el plano $xy$, puede ser útil reducir la densidad primero y alejar la imagen si es necesario).
Haz clic sobre la siguiente imagen, para interactuar con la segunda escena:
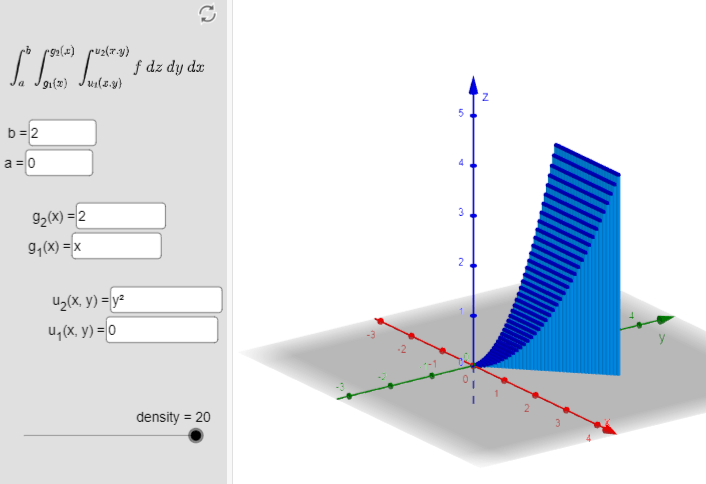
Como ya hemos visto en integrales dobles sobre regiones limitadas generales, el cambio del orden de integración se realiza con bastante frecuencia para simplificar el cálculo. Con una integral triple sobre una caja rectangular, el orden de integración no cambia el nivel de dificultad del cálculo. Sin embargo, con una integral triple sobre una región limitada general, la elección de un orden de integración apropiado puede simplificar bastante el cálculo. A veces, hacer el cambio a las coordenadas polares también puede ser muy útil. Demostramos en dos ejercicios aquí.
Cambiando el orden de integración
Considera la integral iterada
$$\int_{x=0}^{x=1}\int_{y=0}^{y=x^2}\int_{z=0}^{z=y^2} f(x,y,z)dzdydx$$El orden de integración aquí es primero con respecto a $z$, luego $y$, y luego $x$. Expresa esta integral cambiando el orden de integración para que sea primero con respecto a $x$, luego $z$, y luego $y.$ Verifica que el valor de la integral sea el mismo si dejamos $f (x, y, z) = xyz$.
Cambiando el orden de integración y los sistemas de coordenadas
Evalúa la integral triple $\displaystyle\iiint_E\sqrt{x^2 + z^2}dV$, donde $E$ es la región delimitada por el paraboloide $y = x^2 + z^2$ () y el plano $y = 4$.

Recuerda que encontramos el valor promedio de una función de dos variables al evaluar la integral doble sobre una región en el plano y luego dividir por el área de la región.
De manera similar, podemos encontrar el valor promedio de una función en tres variables al evaluar la integral triple sobre una región sólida y luego dividir por el volumen del sólido.
Valor promedio de una función de tres variables
Si $f (x, y, z)$ es integrable sobre una región $E$ sólida delimitada con un volumen positivo $V (E)$, entonces el valor promedio de la función es
$$f_{prom} = \frac{1}{V(E)}\iiint_E f(x,y,z)dV$$Ten en cuenta que el volumen es $V(E) = \displaystyle\iiint_E1dV$
Encontrando una temperatura promedio
La temperatura en un punto $(x, y, z)$ de un sólido $E$ acotado por los planos de coordenadas y el plano $x + y + z = 1$ es $T (x, y, z) = (xy + 8z + 20)° C $. Encuentra la temperatura promedio sobre el sólido.
En los siguientes ejercicios, evalúa las integrales triples sobre la caja sólida rectangular $B$.
En los siguientes ejercicios, cambia el orden de integración integrando primero con respecto a $z$, luego $x$, luego $y$.
$\int_a^b\int_c^d\int_e^f F(x)G(y)H(z)dzdydz = \big(\int_a^bF(x)dx\big)\big(\int_c^dG(y)dy\big) \big(\int_e^fH(z)dz\big)$.
$\int_a^b\int_c^d\int_e^f F'(x)G'(y)H'(z)dzdydz = [F(b) - F(a)][G(d) - G(c)][H(f) - H(e)]$
En los siguientes ejercicios, evalúe las integrales triples sobre la región acotada
$$E = \{ (x, y, z)|a \le x \le b, h_1(x) \le y \le h_2(x), e \le z \le f\}$$
$E = \{ (x,y,z)|0 \le x \le 1, 0 \le y \le -x+1, 1 \le z \le 2\}$ (Solución).
$E = \{ (x,y,z)|1 \le x \le e, 0 \le y \le ln\;x, 0 \le z \le 1\}$
$E = (x,y,z)|\{ 0 \le x \le \frac{π}{2}, -cos\;x \le y \le cos\;x, -1 \le z \le 1\}$ (Solución).
$E = (x,y,z)|\{ 0 \le x \le 1, -x^2 \le y \le x^2, 0 \le z \le 1\}$
En los siguientes ejercicios, evalúa las integrales triples sobre la región acotada $E$ indicada.
$E = (x,y,z)|\{ 0 \le x \le 1, -0 \le y \le x, 0 \le z \le 5-x-y\}$ (Solución).
$E = (x,y,z)|\{ 0 \le x \le 2, 0 \le y \le 2x, 0 \le z \le 4-x-y\}$
$E = (x,y,z)|\{ -1 \le x \le 1, -\sqrt{1-x^2} \le y \le \sqrt{1-x^2}, 0 \le z \le 1-x^2-y^2\}$ (Solución).
$E = (x,y,z)|\{ -2 \le x \le 2, -4\sqrt{4-x^2} \le y \le 4\sqrt{4-x^2}, 0 \le z \le 4-x^2-y^2\}$
En los siguientes ejercicios, evalúa las integrales triples sobre la región acotada $E$ de la forma
$E = (x,y,z)|\{ 1-y^2 \le x \le y^2-1, -1 \le y \le 1, 1 \le z \le 2\}$ (Solución).
$E = (x,y,z)|\{ -y^4 \le x \le y^4, 0 \le y \le 2, 0 \le z \le 4\}$
$E = (x,y,z)|\{ -y^6 \le x \le \sqrt{y}, 0 \le y \le x, -1 \le z \le 1\}$ (Solución).
$E = (x,y,z)|\{ 2-2y \le x \le 2+\sqrt{y}, 0 \le y \le 1x, 2 \le z \le 3\}$
En los siguientes ejercicios, evalúe las integrales triples sobre la región acotada
$E = (x,y,z)|\{ -y \le x \le y, 0 \le y \le 1, 0 \le z \le 1-x^4-y^4\}$ (Solución).
$E = (x,y,z)|\{ 0 \le x \le \sqrt{y}, 0 \le y \le 2, 0 \le z \le 1-x^2-y^2\}$
$E = (x,y,z)|\{ -\sqrt{1-y^2} \le x \le y, 0 \le y \le \frac12x, 2 \le z \le 1-x^2-y^2\}$ (Solución).
$E = (x,y,z)|\{ 0 \le x \le \sqrt{1-y^2}, 0 \le y \le 1x, 0 \le z \le 1-x\}$
En los siguientes ejercicios, evalúe las integrales triples sobre la región acotada
donde $D$ es la proyección de $E$ sobre el plano $xy$

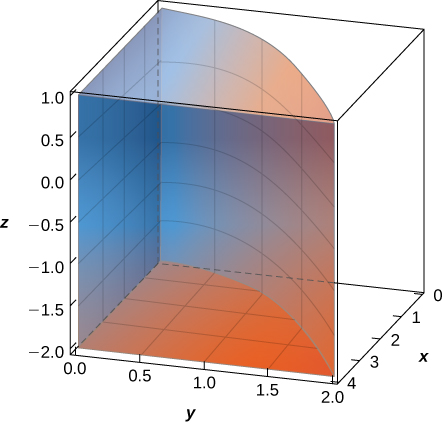
En los siguientes ejercicios, usa dos permutaciones circulares de las variables $x, y$ y $z$ para escribir nuevas integrales cuyos valores sean iguales al valor de la integral original. Una permutación circular de $x, y$ y $z$ es la disposición de los números en uno de los siguientes órdenes: $y, z$, y $x$ o $z, x$ e $y$.
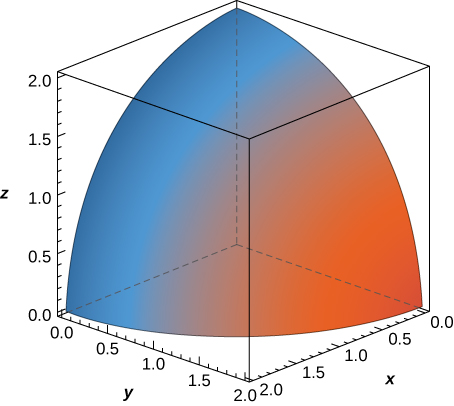

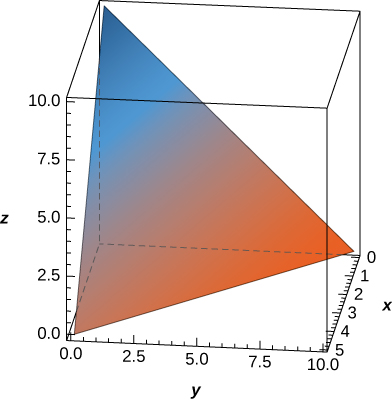

La región $B$ se divide en subcajas de igual tamaño y la integral se aproxima por la suma triple de Riemann
$\sum_{i=1}^l\sum_{j=1}^m\sum_{k=1}^n = f(\bar{x}_i, \bar{y}_j, \bar{z}_k) Δ V$, donde $(\bar{x}_i, \bar{y}_j, \bar{z}_k)$ es el centro de la caja $B_{ijk}$ y $Δ V$ es el volumen de cada subcaja. Aplica la regla del punto medio para aproximar $\iiint_Bx^2dV$ sobre el sólido $B = \{ (x, y, z) | 0 \le x \le 1, 0 \le y \le 1, 0 \le z \le 1\}$ usando una partición de ocho cubos de igual tamaño. Redondea tu respuesta a tres lugares decimales (Solución).
Anteriormente en este capítulo, mostramos cómo convertir una integral doble en coordenadas rectangulares en una integral doble en coordenadas polares para tratar de manera más conveniente problemas que involucran simetría circular. Una situación similar ocurre con las integrales triples, pero aquí necesitamos distinguir entre simetría cilíndrica y simetría esférica. En esta sección convertimos integrales triples en coordenadas rectangulares en una integral triple en coordenadas cilíndricas o esféricas.
Recordemos también el primer capítulo, que mostraba la ópera l’Hemisphèric en Valencia, España. Tiene cuatro secciones, una de las cuales es un teatro en una esfera (pelota) de cinco pisos de altura bajo un techo ovalado tan largo como un campo de fútbol. En el interior hay una pantalla IMAX que convierte la esfera en un planetario con un cielo lleno de 9000 twink.
Como hemos visto anteriormente, en el espacio bidimensional $ℝ^2$, un punto con coordenadas rectangulares $(x,y)$ se puede identificar con $(r, θ)$ en coordenadas polares y viceversa, donde $x = r cos θ, y = r sen θ, r^2 = x^2 + y^2$ y $tan θ = \frac{y}{x}$ son las relaciones entre las variables.
En el espacio tridimensional $ℝ^3$, un punto con coordenadas rectangulares $(x, y, z)$ se puede identificar con coordenadas cilíndricas $(r, θ, z)$ y viceversa. Podemos usar estas mismas relaciones de conversión, agregando $z$ como la distancia vertical al punto desde el plano $xy $como se muestra en la siguiente figura.
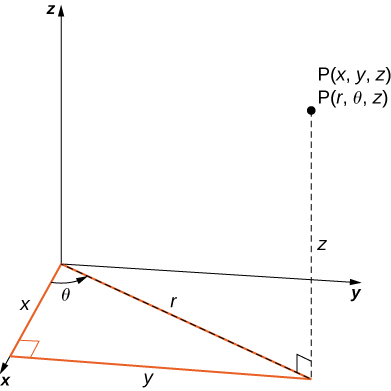
Para convertir de coordenadas rectangulares a cilíndricas, usamos la conversión $x = r cos θ$ e $y = r sen θ$. Para convertir de coordenadas cilíndricas a rectangulares, usamos $r^2 = x^2 + y^2$ y $θ = tan^{-1}\big(\frac{y}{x}\big)$. La coordenada $z$ sigue siendo la misma en ambos casos.
En el plano bidimensional con un sistema de coordenadas rectangular, cuando decimos $x = k$ (constante) nos referimos a una línea vertical ilimitada paralela al eje $y$ y cuando $y = l$ (constante) nos referimos a una línea horizontal ilimitada paralela al eje eje $x$.
Con el sistema de coordenadas polares, cuando decimos $r = c$ (constante), nos referimos a un círculo de radio $c$ unidades y cuando $θ = α$ (constante) nos referimos a un rayo infinito que forma un ángulo $α$ con el eje $x$ positivo.
De manera similar, en un espacio tridimensional con coordenadas rectangulares $(x, y, z)$, las ecuaciones $x = k, y = l$, y $z = m$, donde $k, l$ y $m$ son constantes, representan planos ilimitados paralelos a los planos $yz, xz$ y $xy$, respectivamente. Con coordenadas cilíndricas $(r, θ, z)$, por $r = c, θ = α$ y $z = m$, donde $c, α$ y $m$ son constantes, nos referimos a un cilindro vertical ilimitado con el eje $z$ como eje radial; un plano que forma un ángulo constante $α$ con el plano $xy$ y un plano horizontal ilimitado paralelo al plano $xy$, respectivamente. Esto significa que el cilindro circular $x^2 + y^2 = c2$ en coordenadas rectangulares se puede representar simplemente como $r = c$ en coordenadas cilíndricas.
Las integrales triples a menudo se pueden evaluar más fácilmente utilizando coordenadas cilíndricas en lugar de coordenadas rectangulares. Algunas ecuaciones comunes de superficies en coordenadas rectangulares junto con las ecuaciones correspondientes en coordenadas cilíndricas se enumeran en la siguiente tabla.
Estas ecuaciones serán útiles a medida que procedamos con la resolución de problemas utilizando integrales triples.
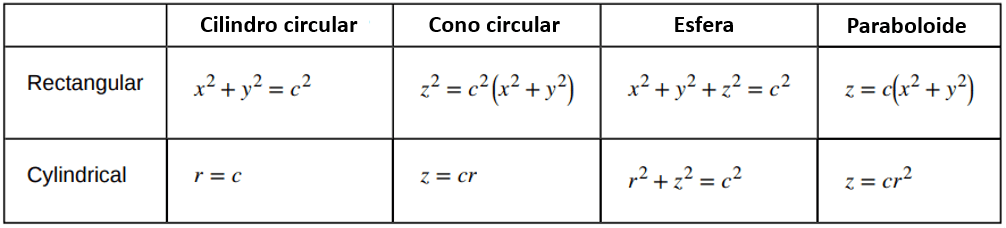
Como antes, partimos de la región acotada más simple $B$ en $ℝ^3$, para describir en coordenadas cilíndricas, en forma de caja cilíndrica, $B = \{ (r, θ, z) | a \le r \le b, α \le θ \le β, c \le z \le d$ ().
Supongamos que dividimos cada intervalo en $l, m$ y $n$ subdivisiones de modo que $Δ r = \frac{b - a}{l}, Δ θ = \frac{β - α}{m}$ y $Δ z = \frac{d - c}{n}$. Entonces podemos enunciar la siguiente definición para una integral triple en coordenadas cilíndricas.
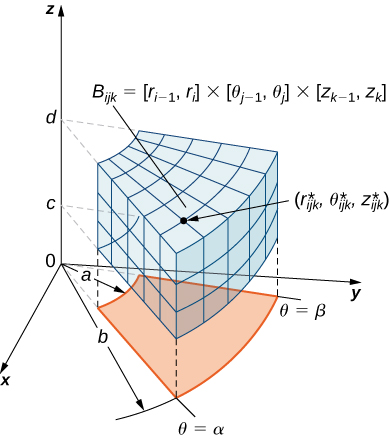
Considera la caja cilíndrica (expresada en coordenadas cilíndricas)
$$\{ B = (r, θ, z) | a \le r \le b, α \le θ \le β, c \le z \le d\}$$Si la función $f (r, θ, z)$ es continua en $B$ y si $(r_{ijk}^*, θ_{ijk}^*, z_{ijk}^*)$ es cualquier punto de muestra en la subcaja cilíndrica $B_{ijk} = [r_{i - 1}, r_i] × [θ_{j - 1}, θ_j] × [z_{k - 1}, z_k]$ (), entonces podemos definir la integral triple en coordenadas cilíndricas como el límite de una suma de Riemann triple, siempre que exista el siguiente límite:
$$\lim\limits_{l,m,n \to\infin}\sum_{i=1}^l\sum_{j=1}^m\sum_{k=1}^n f(r_{ijk}^*, θ_{ijk}^*, z_{ijk}^*) Δ rΔ θΔ z$$Ten en cuenta que si $g (x, y, z)$ es la función en coordenadas rectangulares y la caja $B$ se expresa en coordenadas rectangulares, entonces la integral triple $\iiint_Bg (x, y, z) dV$ es igual a la integral triple $\iiint_Bg ( r cos θ, r sen θ, z) r dr dθ dz$ y tenemos
$$\iiint_Bg (x, y, z) dV = \iiint_Bg ( r cos θ, r sen θ, z) r dr dθ dz\\ = \iiint_B f(r,θ, z)r dr dθ dz \tag{$5.11$}$$Como se mencionó en la sección anterior, todas las propiedades de una integral doble funcionan bien en integrales triples, ya sea en coordenadas rectangulares o cilíndricas.
También son válidos para integrales iteradas. Para reiterar, en coordenadas cilíndricas, el teorema de Fubini toma la siguiente forma:
Supón que $g (x, y, z)$ es continua en una caja rectangular $B$, que cuando se describe en coordenadas cilíndricas se ve como $\{ B = (r, θ, z) | a \le r \le b, α \le θ \le β, c \le z \le d\}$. Entonces $g (x, y, z) = g (r cos θ, r sen θ, z) = f(r, θ, z)$ y
$$\iiint_Bg (x, y, z) dV = \int_c^d\int_{α}^{β}\int_a^bf(r,θ, z)r dr dθ dz$$La integral iterada puede ser reemplazada de manera equivalente por cualquiera de las otras cinco integrales iteradas obtenidas integrando con respecto a las tres variables en otros órdenes. Los sistemas de coordenadas cilíndricas funcionan bien para sólidos que son simétricos alrededor de un eje, como cilindros y conos. Veamos algunos ejercicios antes de definir la integral triple en coordenadas cilíndricas en regiones cilíndricas generales.
Evaluación de una integral triple sobre una caja cilíndrica
Evalúa la integral triple $\iiint_B (zr sen θ) r dr dθ dz$ donde la caja cilíndrica $B$ es $B = \{ (r, θ, z) | 0 \le r \le 2, 0 \le θ \le π / 2, 0 \le z \le 4\}$.
Si la región cilíndrica sobre la que tenemos que integrarnos es un sólido general, miramos las proyecciones en los planos de coordenadas. Por tanto, la integral triple de una función continua $f (r, θ, z)$ sobre una región sólida general $\{ E = (r, θ, z) | (r, θ) ∈ D, u_1 (r, θ) \le z \le u_2 ( r, θ)$ en $ℝ^3$, donde $D$ es la proyección de $E$ sobre el plano $rθ$, es
$$\iiint_E f(r, θ, z)r dr dθ dz = \iint_D\bigg[\int_{u_1(r,θ)}^{u_2(r,θ)}f(r, θ, z)dz\bigg]r dz dr dθ$$Existen fórmulas similares para proyecciones en los otros planos de coordenadas. Podemos usar coordenadas polares en esos planos si es necesario.
Configuración de una integral triple en coordenadas cilíndricas sobre una región general
Considera la región $E$ dentro del cilindro circular recto con la ecuación $r = 2 sen θ$, limitada abajo por el plano $rθ$ y limitada arriba por la esfera con radio $4$ centrada en el origen ().
Establece una integral triple sobre esta región con una función $f (r, θ, z)$ en coordenadas cilíndricas.

Configuración de una triple integral de dos maneras
Sea $E$ la región delimitada abajo por el cono $z = \sqrt{x^2 + y^2}$ y arriba por el paraboloide $z = 2 - x^2 - y^2$ (). Establece una integral triple en coordenadas cilíndricas para encontrar el volumen de la región, usando los siguientes órdenes de integración:

Encontrar un volumen con integrales triples de dos maneras
Sea $E$ la región delimitada abajo por el plano $rθ$, arriba por la esfera $x^2 + y^2 + z^2 = 4$, y en los lados por el cilindro $x^2 + y^2 = 1$ (). Establece una integral triple en coordenadas cilíndricas para encontrar el volumen de la región usando los siguientes órdenes de integración, y en cada caso encuentra el volumen y verifica que las respuestas sean las mismas:
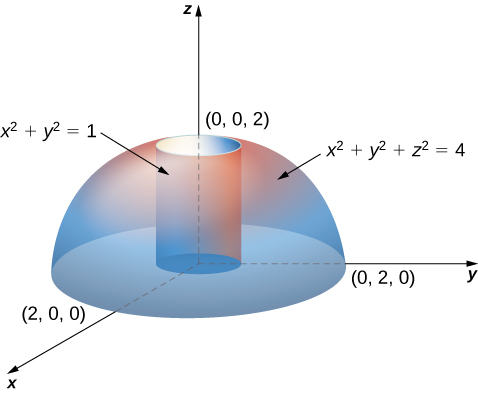
Para las integrales triples en coordenadas cilíndricas, nuevamente recurrimos a las escenas interactivas diseñadas en GeoGebra por Brian Abbott y Joseph Manthey, en la cual se describen los límites de integración y, además, pulsando los botones, la interpretación gráfica de los mismos.
Una segunda escena interactiva, diseñada también en GeoGebra, muestra la región de integración para una integral triple (de una función $f$ arbitraria) en coordenadas cilíndricas (usa $t$ para $θ$ cuando ingreses límites de integración).
Haz clic sobre la siguiente imagen, para interactuar con la segunda escena:

En el espacio tridimensional $\R^3$ en el sistema de coordenadas esféricas, especificamos un punto $P$ por su distancia $ρ$ desde el origen, el ángulo polar $θ$ desde el eje $x$ positivo (igual que en el sistema de coordenadas cilíndricas) y el ángulo $ϕ$ desde el eje $z$ positivo y la línea $OP$ (). Observa que $ρ \ge 0$ y $0 \le ϕ \le π$. Las coordenadas esféricas son útiles para integrales triples sobre regiones que son simétricas con respecto al origen.
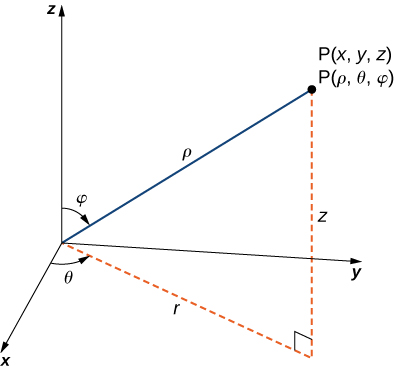
Recuerda las relaciones que conectan coordenadas rectangulares con coordenadas esféricas. De coordenadas esféricas a coordenadas rectangulares:
$$x = ρ sen ϕ cos θ, y = ρ sen ϕ sen θ,\;\;\;\text{y}\;\;\;z = ρ cos ϕ$$De coordenadas rectangulares a coordenadas esféricas:
$$ρ^2 = x^2 + y^2 + z^2, tanθ =\frac{y}{x}, ϕ = \bigg(\frac{z}{\sqrt{x^2+y^2+z^2}}\bigg)$$Otras relaciones que son importantes conocer para las conversiones son
| Estas ecuaciones se utilizan para convertir de coordenadas esféricas a coordenadas cilíndricas |
y
| Estas ecuaciones se utilizan para convertir de coordenadas cilíndricas a coordenadas esféricas. |
La siguiente figura muestra algunas regiones sólidas que son convenientes para expresar en coordenadas esféricas.

Ahora establecemos una integral triple en el sistema de coordenadas esféricas, como lo hicimos antes en el sistema de coordenadas cilíndricas.
Sea la función $f (ρ, θ, ϕ)$ continua en una caja esférica acotada, $B =\{ (ρ, θ, ϕ) | a \le ρ \le b, α \le θ \le β, γ \le ϕ \le \psi\}$.
Luego dividimos cada intervalo en subdivisiones $l, m$ y $n$ de manera que $Δ ρ = \frac{b - a}{l}, Δ θ = \frac{β - α}{m}, Δ ϕ = \frac{\psi - γ}{n}$.
Ahora podemos ilustrar el siguiente teorema para integrales triples en coordenadas esféricas con $(ρ_{ijk}^*, θ_{ijk}^*, ϕ_{ijk}^*)$ como cualquier punto muestral en la subcaja esférica $B_{ijk}$. Para el elemento de volumen de la subcaja $Δ V$ en coordenadas esféricas, tenemos $Δ V = (Δ ρ)(ρΔ ϕ)(ρ sen ϕΔ θ)$, como se muestra en la siguiente figura.
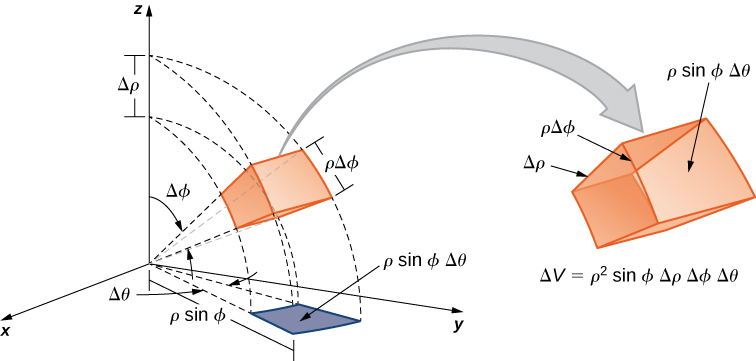
La integral triple en coordenadas esféricas es el límite de una suma triple de Riemann,
$$\lim\limits_{l,m,n \to \infin}\sum_{i=1}^l\sum_{j=1}^m\sum_{k=1}^n f(ρ_{ijk}^*, θ_{ijk}^*, ϕ_{ijk}^*)(ρ_{ijk}^*)^2 sen\;ϕΔ ρΔ θΔ ϕ$$siempre que exista el límite.
Al igual que con las otras integrales múltiples que hemos examinado, todas las propiedades funcionan de manera similar para una integral triple en el sistema de coordenadas esféricas, al igual que las integrales iteradas. El teorema de Fubini adopta la siguiente forma.
Teorema de Fubini para coordenadas esféricas
Si $f(ρ, θ, ϕ)$ es continua en una caja sólida esférica $B = [a, b]× [α, β] × [γ, \psi]$, entonces
$$\iiint_B f(ρ, θ, ϕ)ρ^2 sen\;ϕ dρ dϕ dθ\\ = \int_{ϕ = γ}^{ϕ = \psi}\int_{θ = α}^{θ = β}\int_{ρ=a}^{ρ=b}f(ρ, θ, ϕ)ρ^2 sen\;ϕ dρ dϕ dθ \tag{$5.12$}$$Esta integral iterada puede ser reemplazada por otras integrales iteradas integrando con respecto a las tres variables en otros órdenes.
Como se indicó anteriormente, los sistemas de coordenadas esféricas funcionan bien para sólidos que son simétricos alrededor de un punto, como esferas y conos. Veamos algunos ejemplos antes de considerar integrales triples en coordenadas esféricas en regiones esféricas generales.
Evaluando una integral triple en coordenadas esféricas
Evaluar la integral triple iterada
$$\int_{θ = 0}^{θ = 2π}\int_{ϕ=0}^{ϕ=π/2}\int_{ρ=0}^{ρ=1}ρ^2 sen\;ϕ dρ dϕ dθ$$
El concepto de triple integración en coordenadas esféricas se puede extender a la integración sobre un sólido general, utilizando las proyecciones sobre los planos de coordenadas.
Ten en cuenta que $dV$ y $dA$ significan los incrementos en volumen y área, respectivamente. Las variables $V$ y $A$ se utilizan como variables de integración para expresar las integrales.
La integral triple de una función continua $f(ρ, θ, ϕ)$ sobre una región sólida general
$$E = \{ (ρ, θ, ϕ)|(ρ, θ) ∈ D, u_1(ρ, θ) \le ϕ \le u_2(ρ, θ)\}$$en $ℝ^3$, donde $D$ es la proyección de $E$ sobre el plano $ρθ$, es
$$\iiint_E f(ρ, θ, ϕ)dV = \iint_D\bigg[\int_{u_1(ρ, θ)}^{u_2(ρ, θ)}f(ρ, θ, ϕ)dϕ\bigg]dA$$En particular, si $D = \{ (ρ, θ) | g_1(θ) \le ρ \le g_2(θ), α \le θ \le β \}$, entonces tenemos
$$\iiint_E f(ρ, θ, ϕ)dV = \int_{α}^{β}\int_{g_1(θ)}^{g_2(θ)}\int_{u_1(ρ, θ)}^{u_2(ρ, θ)}f(ρ, θ, ϕ)ρ^2 senϕ dϕ dρ dθ$$Se producen fórmulas similares para las proyecciones sobre los otros planos de coordenadas.
Evaluando una integral triple en coordenadas esféricas
Establece una integral para el volumen de la región limitada por el cono $z = \sqrt{3\big(x^2 + y^2\big)}$ y el hemisferio $z = \sqrt{4 - x^2 - y^2}$ (vea la figura siguiente).

Evaluando una integral triple en coordenadas esféricas
Sea $E$ la región delimitada abajo por el cono $z = \sqrt{x^2 + y^2}$ y arriba por la esfera $z = x^2 + y^2 + z^2$ (). Establece una integral triple en coordenadas esféricas y encuentra el volumen de la región usando los siguientes órdenes de integración:
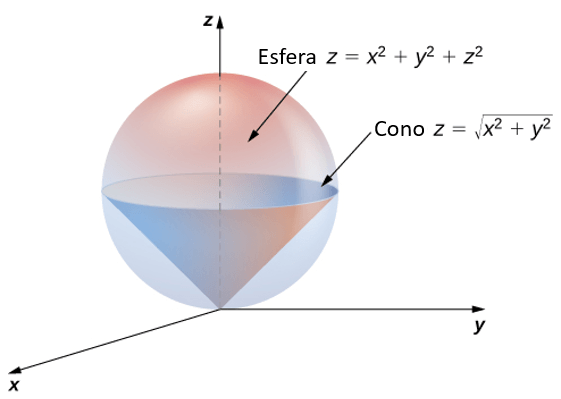
Antes de finalizar esta sección, presentamos un par de ejemplos que pueden ilustrar la conversión de coordenadas rectangulares a coordenadas cilíndricas y de coordenadas rectangulares a coordenadas esféricas.
Conversión de coordenadas rectangulares a coordenadas cilíndricas
Convierte la siguiente integral en coordenadas cilíndricas:
$$\int_{y=-1}^{y=1}\int_{x=0}^{x=\sqrt{1-y^2}}\int_{z=x^2+y^2}^{\sqrt{x^2+y^2}}xyz dz dx dy$$
Conversión de coordenadas rectangulares a coordenadas esféricas
Convierte la siguiente integral en coordenadas cilíndricas:
$$\int_{y=0}^{y=3}\int_{x=0}^{x=\sqrt{9-y^2}}\int_{z=\sqrt{x^2+y^2}}^{\sqrt{18-x^2-y^2}}(x^2+y^2+z^2) dz dx dy$$
Inicio del capítulo: Encontrar el volumen de l’Hemisphèric
Encuentra el volumen del planetario esférico en l’Hemisphèric en Valencia, España, que tiene cinco pisos de altura y un radio de aproximadamente $50$ pies, usando la ecuación $x^2 + y^2 + z^2 = r^2$ (ver figura a continuación)

Encontrando el volumen de un elipsoide
Encuentra el volumen del elipsoide $\displaystyle\frac{x^2}{a^2} + \frac{y^2}{b^2} + \frac{z^2}{c^2}$
Hallando el volumen del espacio dentro de un elipsoide y fuera de una esfera
Encuentra el volumen del espacio dentro del elipsoide $\displaystyle\frac{x^2}{a^2} + \frac{y^2}{75^2} + \frac{80^2}{90^2}$ y fuera de una esfera $x^2+y^2+z^2 = 50^2$
Globos aerostáticos
Los globos aerostáticos son un pasatiempo relajante y pacífico que muchas personas disfrutan. Muchas reuniones de globos aerostáticos tienen lugar en todo el mundo, como la Fiesta Internacional de Globos Aerostáticos de Albuquerque. El evento de Albuquerque es el festival de globos aerostáticos más grande del mundo, con la participación de más de 500 globos cada año.

Como su nombre lo indica, los globos de aire utilizan aire caliente para generar flotación (el aire caliente es menos denso que el aire más frío, por lo que el globo flota mientras el aire se mantenga caliente). El calor es generado por un quemador de propano suspendido debajo de la abertura de la canasta.
Una vez que el globo despega, el piloto controla la altitud del globo, ya sea usando el quemador para calentar el aire y ascender o usando un respiradero cerca de la parte superior del globo para liberar aire caliente y descender. Sin embargo, el piloto tiene muy poco control sobre a dónde va el globo; los globos están a merced de los vientos. La incertidumbre sobre dónde terminaremos es una de las razones por las que los globos aerostáticos se sienten atraídos por este deporte.
En este proyecto usamos integrales triples para aprender más sobre los globos aerostáticos. Modelamos el globo en dos piezas. La parte superior del globo está modelada por una media esfera de $28$ pies de radio. La parte inferior del globo está modelada por un cono truncado (piensa en un cono de helado con el extremo puntiagudo cortado).
El radio del extremo grande del frustum es de $28$ pies y el radio del extremo pequeño del frustum es de $6$ pies. En la siguiente figura se muestra un gráfico de nuestro modelo de globo y un diagrama de sección transversal que muestra las dimensiones.
Primero queremos encontrar el volumen del globo. Si miramos la parte superior y la parte inferior del globo por separado, vemos que son sólidos geométricos con fórmulas de volumen conocidas. Sin embargo, aún vale la pena configurar y evaluar las integrales que necesitaríamos para encontrar el volumen.
Si calculamos el volumen usando la integración, podemos usar las fórmulas de volumen conocidas para verificar nuestras respuestas. Esto ayudará a garantizar que tengamos las integrales configuradas correctamente para las etapas posteriores y más complicadas del proyecto.
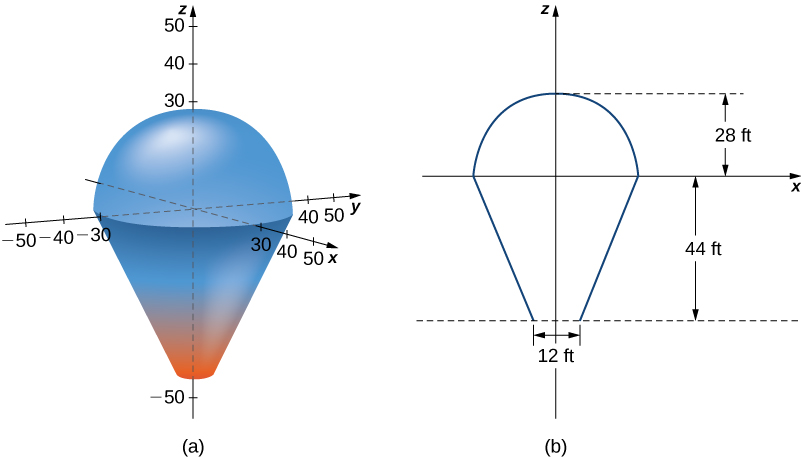
En realidad, calcular la temperatura en un punto dentro del globo es una tarea tremendamente complicada. De hecho, toda una rama de la física (termodinámica) se dedica al estudio del calor y la temperatura.
Sin embargo, para los propósitos de este proyecto, vamos a hacer algunas suposiciones simplificadoras sobre cómo varía la temperatura de un punto a otro dentro del globo. Supón que justo antes del despegue, la temperatura (en grados Fahrenheit) del aire dentro del globo varía según la función
$$T_0(r, θ, z) = \frac{z-r}{10} + 210$$
Supón que después de que el piloto activa el quemador durante $10$ segundos, la temperatura del aire en la columna descrita anteriormente aumenta de acuerdo con la fórmula
$$H (r, θ, z) = -2z - 48$$Entonces la temperatura del aire en la columna viene dada por
$$T_1 (r, θ, z) = \frac{z-r}{10} + 210 + (-2z - 48)$$mientras que la temperatura en el resto del globo todavía está dada por
$$T_0 (r, θ, z) = \frac{z-r}{10} + 2100$$Para las integrales triples en coordenadas esféricas, presentamos dos escenas interactivas diseñadas en GeoGebra por Brian Abbott y Joseph Manthey y tdr. Esta última muestra la región de integración para una integral triple en coordenadas esféricas y permite, además, cambiar los límites de integración.
Haz clic sobre la siguiente imagen, para interactuar con la segunda escena:
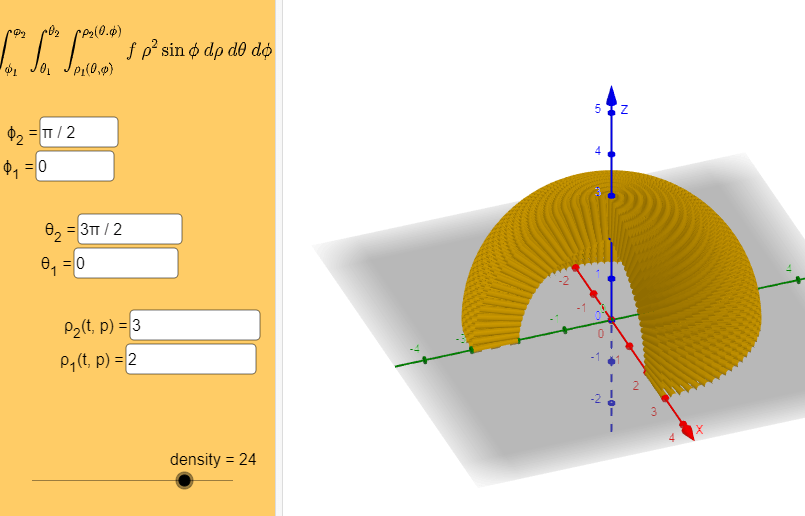
En los siguientes ejercicios, evalúa las integrales triples $\iiint_Ef (x, y, z) dV$ sobre el sólido $E$.
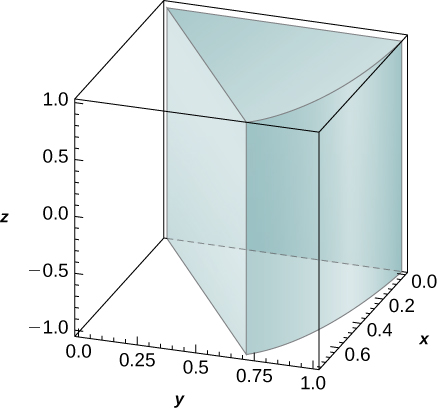
En los siguientes ejercicios, los límites del sólido $E$ se dan en coordenadas cilíndricas.
En los siguientes ejercicios, se dan la función $f$ y la región $E$.
En los siguientes ejercicios, encuentre el volumen del sólido $E$ cuyos límites se dan en coordenadas rectangulares.
En los siguientes ejercicios, evalúa la triple integral $\iiint_B f(x,y,z)dV$ sobre le sólido $B$

$\iiint_BF (x, y, z) dV = 2π\int_a^bρ^2f (ρ) dρ$, donde $B$ es la región entre los hemisferios concéntricos superiores de radios $a$ y $b$ centrados en el origen, con $0 \lt a \lt b$ y $F$ una función esférica definida en $B$.
donde $B = \{ (x,y,z)|1 \le x^2+y^2+z^2 \le 2, z\ge 0\}$
donde $B$ es la región entre los hemisferios concéntricos superiores de radios $π$ y $2π$ centrados en el origen y situados en el primer octante.
En los siguientes ejercicios, se dan la función $f$ y la región $E$.
En los siguientes ejercicios, encuentra el volumen del sólido $E$ cuyos límites se dan en coordenadas rectangulares.
Ya hemos discutido algunas aplicaciones de múltiples integrales, como encontrar áreas, volúmenes y el valor promedio de una función en una región acotada. En esta sección desarrollamos técnicas computacionales para encontrar el centro de masa y los momentos de inercia de varios tipos de objetos físicos, utilizando integrales dobles para una lámina (placa plana) e integrales triples para un objeto tridimensional con densidad variable.
Por lo general, se considera que la densidad es un número constante cuando la lámina o el objeto son homogéneos; es decir, el objeto tiene una densidad uniforme.
El centro de masa también se conoce como centro de gravedad si el objeto está en un campo gravitacional uniforme. Si el objeto tiene una densidad uniforme, el centro de masa es el centro geométrico del objeto, que se denomina centroide. La muestra un punto $P$ como centro de masa de una lámina.
La lámina está perfectamente equilibrada alrededor de su centro de masa.

Para encontrar las coordenadas del centro de masa $P (\bar{x}, \bar{y})$ de una lámina, necesitamos encontrar el momento $M_x$ de la lámina con respecto al eje $x$ y el momento $M_y$ con respecto al eje $y$. También necesitamos encontrar la masa $m$ de la lámina. Luego
$$\bar{x} = \frac{M_y}{m}\;\;\;\text{y}\;\;\;\bar{y} = \frac{M_x}{m}$$Consulta, en la siguiente unidad interactiva, cómo calcular el centro de masa de una lámina delgadaSi se asume que la densidad de la lámina es constante, el centro geométrico de dicha región se llama centroide, por lo que el centro de masa de la lámina depende únicamente de la forma de la región correspondiente en el plano; no depende de la densidad. En este caso, el centro de masa de la lámina corresponde al centroide de la región delineada en el plano..
Vamos a usar una idea similar aquí, excepto que en la lámina bidimensional usaremos una integral doble. Si permitimos una función de densidad constante, entonces $\bar{x} = \frac{M_y}{m}\;\;\;\text{y}\;\;\;\bar{y} = \frac{M_x}{m}$ dan el centroide de la lámina.
Supón que la lámina ocupa una región $R$ en el plano $xy$, y sea $ρ (x,y)$ su densidad (en unidades de masa por unidad de área) en cualquier punto $(x,y)$. Por lo tanto, $ρ (x,y) = \lim\limits_{Δ A \to 0}\frac{Δ m}{Δ A}$, donde $Δ m$ y $Δ A$ son la masa y el área de un pequeño rectángulo que contiene el punto $(x,y)$ y el límite se toma cuando las dimensiones del rectángulo van hacia $0$ (ver ).
Al igual que antes, dividimos la región $R$ en pequeños rectángulos $R_{ij}$ con área $Δ A$ y elegimos $\big(x_{ij}^*, y_{ij}^*\big)$ como puntos de muestra.
Entonces la masa $m_{ij}$ de cada $R_{ij}$ es igual a $ρ\big(x_{ij}^*, y_{ij}^*\big)Δ A$ (). Sean $k $y $l$ el número de subintervalos en $x$ e $y$, respectivamente. Además, ten en cuenta que es posible que la forma no siempre sea rectangular, pero el límite funciona de todos modos, como se vio en las secciones anteriores.

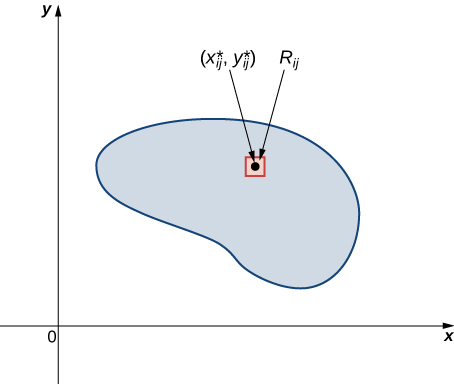
Por tanto, la masa de la lámina es
$$m = \lim\limits_{k, l \to \infin} \sum_{i=1}^k\sum_{j=1}^l m_{ij} = \lim\limits_{k, l \to \infin} \sum_{i=1}^k\sum_{j=1}^l ρ\big(x_{ij}^*, y_{ij}^*\big) Δ A\\ = \iint_R ρ(x,y)dA \tag{$5.13$}$$Veamos ahora un ejemplo de cómo encontrar la masa total de una lámina triangular
Hallando la masa total de una lámina
Considera una lámina triangular $R$ con vértices $(0, 0), (0, 3), (3, 0)$ y con densidad $ρ (x,y) = xy\;\; kg/m^2$. Calcula la masa total.
Ahora que hemos establecido la expresión de masa, tenemos las herramientas que necesitamos para calcular momentos y centros de masa. El momento $M_x$ con respecto al eje $x$ para $R$ es el límite de las sumas de momentos de las regiones $R_{ij}$ con respecto al eje $x$.
Por lo tanto
$$M_x = \lim\limits_{k, l \to \infin} \sum_{i=1}^k\sum_{j=1}^l \big(y_{ij}^*\big)m_{ij} = \lim\limits_{k, l \to \infin} \sum_{i=1}^k\sum_{j=1}^l \big(y_{ij}^*\big)m_{ij}\big(y_{ij}^*\big)ρ\big(x_{ij}^*, y_{ij}^*\big)Δ A\\ = \iint_R yρ(x,y)dA \tag{$5.14$}$$
De manera similar, el momento $M_y$ respecto al eje $y$ para $R$ es el límite de las sumas de momentos de las regiones $R_{ij}$ respecto al eje $y$
Por lo tanto
$$M_y = \lim\limits_{k, l \to \infin} \sum_{i=1}^k\sum_{j=1}^l \big(x_{ij}^*\big)m_{ij} = \lim\limits_{k, l \to \infin} \sum_{i=1}^k\sum_{j=1}^l \big(x_{ij}^*\big)m_{ij}\big(y_{ij}^*\big)ρ\big(x_{ij}^*, y_{ij}^*\big)Δ A\\ = \iint_R xρ(x,y)dA \tag{$5.15$}$$
Encontrando momentos
Considera la misma lámina triangular $R$ con vértices $(0, 0), (0, 3), (3, 0)$ y con densidad $ρ (x,y) = xy$. Encuentra los momentos $M_x$ y $M_y$.
Finalmente, estamos listos para reformular las expresiones del centro de masa en términos de integrales. Denotamos la coordenada $x$ del centro de masa por $\bar{x}$ y la coordenada $y$ por $\bar{y}$. Específicamente
$$\bar{x} = \frac{M_y}{m} = \frac{\iint_R xρ(x,y)dA}{\iint_R ρ(x,y)dA}\;\;\text{y}$$ $$\bar{y} = \frac{M_x}{m} = \frac{\iint_R yρ(x,y)dA}{\iint_R ρ(x,y)dA} \tag{$5.16$}$$
Encontrando el centro de masa
Considera nuevamente la misma región triangular $R$ con vértices $(0, 0), (0, 3), (3, 0)$ y con función de densidad $ρ (x,y) = xy$. Encuentra el centro de masa.
Una vez más, de acuerdo con los comentarios al final del ejercicio anterior, tenemos expresiones para el centroide de una región en el plano:
$$x_c = \frac{M_y}{m} = \frac{\iint_R xdA}{\iint_R dA}\;\;\;\text{y}\;\;\;y_c = \frac{M_x}{m} = \frac{\iint_R ydA}{\iint_R dA}$$Debemos usar estas fórmulas y verificar el centroide de la región triangular $R$ a la que se hace referencia en los últimos tres ejercicios.
Encontrando la masa, momentos y centro de masa
Encuentra la masa, los momentos y el centro de masa de la lámina de densidad $ρ (x,y) = x + y$ ocupando la región $R$ debajo de la curva $y = x^2$ en el intervalo $0 \le x \le 2$ (ver la figura ).
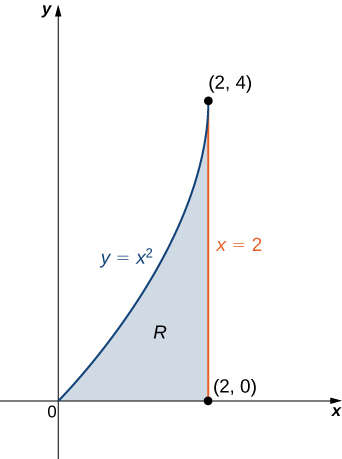
El momento de inercia de una partícula de masa $m$ alrededor de un eje es $mr^2$, donde $r$ es la distancia de la partícula al eje. Podemos ver en la que el momento de inercia del subrectángulo $R_{ij}$ con respecto al eje $x$ es $(y_{ij}^*)^2ρ (x_{ij}^*, y_{ij}^*)Δ A$. De manera similar, el momento de inercia del subrectángulo $R_{ij}$ alrededor del eje $y$ es $(x_{ij}^*)^2ρ (x_{ij}^*, y_{ij}^*) Δ A$. El momento de inercia está relacionado con la rotación de la masa; específicamente, mide la tendencia de la masa a resistir un cambio en el movimiento de rotación alrededor de un eje.
El momento de inercia $I_x$ alrededor del eje $x$ para la región $R$ es el límite de la suma de momentos de inercia de las regiones $R_{ij}$ alrededor del eje $x$. Por lo tanto
$$\begin{aligned} I_x &= \lim\limits_{k, l \to \infin}\sum_{i=1}^k\sum_{j=1}^l\big(y_{ij}^*\big)^2 mi_{ij} = \lim\limits_{k, l \to \infin}\sum_{i=1}^k\sum_{j=1}^l \big(y_{ij}^*\big)^2ρ(x_{ij}^*, y_{ij}^*)Δ A\\ &= \iint_R y^2 ρ(x,y)dA \end{aligned}$$De manera similar, el momento de inercia $I_y$ con respecto al eje $y$ para $R$ es el límite de la suma de momentos de inercia de las regiones $R_{ij}$ con respecto al eje $y$. Por lo tanto
$$\begin{aligned} I_y &= \lim\limits_{k, l \to \infin}\sum_{i=1}^k\sum_{j=1}^l\big(x_{ij}^*\big)^2 mi_{ij} = \lim\limits_{k, l \to \infin}\sum_{i=1}^k\sum_{j=1}^l \big(x_{ij}^*\big)^2ρ(x_{ij}^*, y_{ij}^*)Δ A\\ &= \iint_R x^2 ρ(x,y)dA \end{aligned}$$A veces, necesitamos encontrar el momento de inercia de un objeto con respecto al origen, que se conoce como momento polar de inercia. Denotamos esto por $I_0$ y lo obtenemos sumando los momentos de inercia $I_x$ e $I_y$. Por lo tanto
$$I_0 = I_x + I_y = \iint_R\big(x^2+ y^2\big)ρ(x,y) dA$$Todas estas expresiones se pueden escribir en coordenadas polares sustituyendo $x = r cos θ, y = r senθ$ y $dA = r dr dθ$. Por ejemplo,
Antes de nuestro primer ejercicio, observa la siguiente escena interactiva del Proyecto Un_100, que describe cómo se calculan momentos de inercia con $ρ (x,y)$ constante en láminas delgadas o en secciones transversales de un elemento prismático:
Encontrando los momentos de inercia para una lámina triangular
Utiliza la región triangular $R$ con vértices $(0, 0), (2, 2) y (2, 0)$ y con densidad $ρ (x,y) = xy$ como en los ejercicios anteriores. Encuentra los momentos de inercia.
Como se mencionó anteriormente, el momento de inercia de una partícula de masa $m$ alrededor de un eje es $mr^2$ donde $r$ es la distancia de la partícula al eje, también conocido como radio de giro.
Por lo tanto, los radios de giro con respecto al eje $x$, el eje $y$ y el origen son
$$R_x = \sqrt{\frac{I_x}{m}}, R_y = \sqrt{\frac{I_y}{m}}\;\;\;\text{y}\;\;\;R_0 = \sqrt{\frac{I_0}{m}}$$respectivamente.
En cada caso, el radio de giro nos dice a qué distancia (distancia perpendicular) del eje de rotación se puede concentrar la masa total de un objeto. Los momentos de un objeto son útiles para encontrar información sobre el equilibrio y el torque del objeto alrededor de un eje, pero los radios de giro se utilizan para describir la distribución de masa alrededor de su eje centroidal. Hay muchas aplicaciones en ingeniería y física. A veces es necesario encontrar el radio de giro, como en el siguiente ejemplo.
Hallando el radio de giro de una lámina triangular
Considera la misma lámina triangular $R$ con vértices $(0, 0), (2, 2) y (2, 0)$ y con densidad $ρ (x,y) = xy$ como en los ejercicios anteriores. Encuentra los radios de giro con respecto al eje $x$, el eje $y$ y el origen.
Todas las expresiones de integrales dobles discutidas hasta ahora pueden modificarse para convertirse en integrales triples.
Si tenemos un objeto sólido $Q$ con una función de densidad $ρ (x, y, z)$ en cualquier punto $(x, y, z)$ en el espacio, entonces su masa es
$$m = \iiint_Q ρ(x,y,z)dV$$Sus momentos sobre el plano $xy$, el plano $xz$ y el plano $yz$ son
$$M_{xy} = \iiint_Q zρ(x,y,z)dV, M_{xz} = \iiint_Q yρ(x,y,z)dV,\\ M_{yz} = \iiint_Q xρ(x,y,z)dV$$Si el centro de masa del objeto es el punto $(\bar{x}, \bar{y},\bar{z})$ entonces
$$\bar{x} = \frac{M_{yz}}{m}, \bar{y} = \frac{M_{xz}}{m}, \bar{z} = \frac{M_{xy}}{m}$$Además, si el objeto sólido es homogéneo (con densidad constante), entonces el centro de masa se convierte en el centroide del sólido. Finalmente, los momentos de inercia con respecto al plano $yz$, el plano $xz$ y el plano $xy$ son
Encontrando la masa de un sólido
Supón que $Q$ es una región sólida limitada por $x + 2y + 3z = 6$ y los planos de coordenadas y tiene densidad $ρ (x, y, z) = x^2yz$ Calcula la masa total.
Encontrando el centro de masa de un sólido
Supón que $Q$ es una región sólida limitada por el plano $x + 2y + 3z = 6$ y los planos de coordenadas con densidad $ρ (x, y, z) = x^2yz$ (observa la ). Encuentra el centro de masa usando una aproximación decimal.
Concluimos esta sección con un ejercicio de cómo encontrar momentos de inercia $I_x, I_y$ e $I_z$.
Momentos de inercia de un sólido
Supón que $Q$ es una región sólida y está limitada por $x + 2y + 3z = 6 $ y los planos de coordenadas con densidad $ρ (x, y, z) = x^2yz$ (observa la figura ). Encuentra los momentos de inercia del tetraedro $Q$ con respecto al plano $yz$, el plano $xz$ y el plano $xy$.
En los siguientes ejercicios, la región $R$ ocupada por una lámina se muestra en un gráfico. Encuentra la masa de $R$ con la función de densidad $ρ$

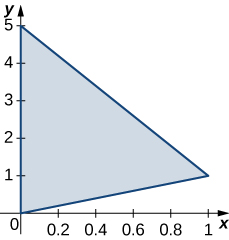
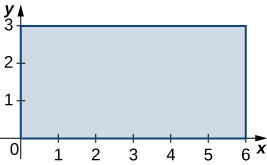
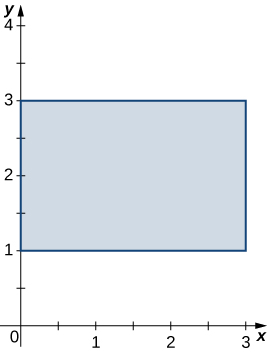
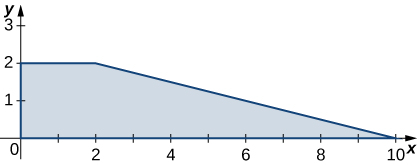

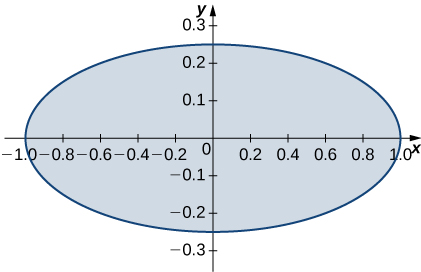

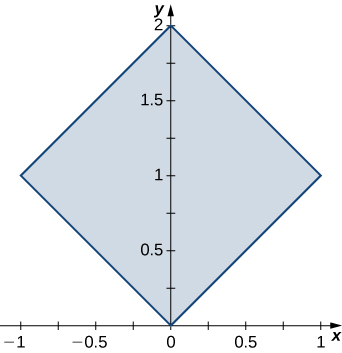
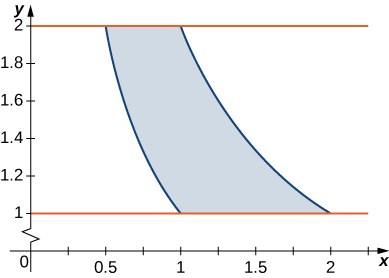
En los siguientes ejercicios, considera una lámina que ocupa la región $R$ y que tiene la función de densidad $ρ$ dada en el grupo de ejercicios anterior. Utiliza un sistema de álgebra computarizado (CAS) para responder las siguientes preguntas.
En los siguientes ejercicios, considera una lámina que ocupa la región $R$ y que tiene la función de densidad $ρ$ dada en los dos primeros grupos de ejercicios.
Encuentra el momento $M_{xy}$ del sólido alrededor del plano $xy$ si su densidad dada en coordenadas cilíndricas es $ρ (r, θ, z) = \frac{d^2f}{dr^2} (r)$, donde $f$ es una función diferenciable con la primera y segunda derivadas continuas y diferenciables en $(0, a)$ (Solución).
Recuerda el método de integración por sustitución. Al evaluar una integral como $\displaystyle\int_2^3 x (x^2-4)^5dx$, sustituimos $u = g (x) = x^2 - 4$. Entonces $du = 2x dx$ o $x dx = \frac12du$ y los límites cambian a $u = g (2) = 2^2 - 4 = 0$ y $u = g (3) = 9 - 4 = 5$. Por lo tanto, la integral se convierte en $\displaystyle \int_0^5\frac12u^5du$ y esta integral es mucho más sencilla de evaluar. En otras palabras, al resolver problemas de integración, hacemos las sustituciones apropiadas para obtener una integral que se vuelve mucho más simple que la integral original.
También usamos esta idea cuando transformamos integrales dobles en coordenadas rectangulares en coordenadas polares y transformamos integrales triples en coordenadas rectangulares en coordenadas cilíndricas o esféricas para hacer los cálculos más simples. Más generalmente,
$$\int_a^b f(x=dx = \_c^d f(g(u))g'(u)du$$Donde $x = g (u), dx = g'(u) du$, y $u = c$ y $u = d$ satisfacen $c = g (a)$ y $d = g (b)$.
Un resultado similar ocurre en integrales dobles cuando sustituimos $x = f(r, θ) = r cos θ, y = g (r, θ) = r sen θ$, y $dA = dx dy = r dr dθ$. Entonces tenemos
$$\iint_R f(x,y)dA = \iint_S f(rcosθ, rsenθ)rdrdθ$$donde el dominio $R$ se reemplaza por el dominio $S$ en coordenadas polares. Generalmente, la función que usamos para cambiar las variables para hacer la integración más simple se llama transformación o mapeo.
Una transformación plana $T$ es una función que transforma una región $G$ en un plano en una región $R$ en otro plano mediante un cambio de variables. Tanto $G$ como $R$ son subconjuntos de $R^2$. Por ejemplo, la muestra una región $G$ en el plano $uv$ transformada en una región $R$ en el plano $xy$ por el cambio de variables $x = g (u, v)$ y $y = h (u, v)$, o algunas veces escribe $x = x (u, v)$ y $y = y (u, v)$. Normalmente asumiremos que cada una de estas funciones tiene primeras derivadas parciales continuas, lo que significa que $g_u, g_v, h_u$ y $h_v$ existen y también son continuas. La necesidad de este requisito se hará evidente pronto.
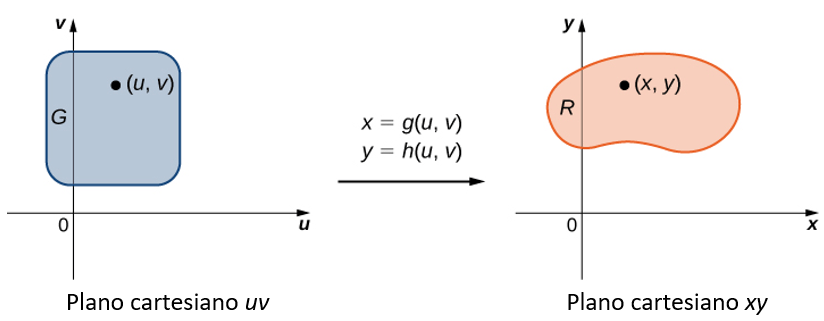
Una transformación $T: G \rarr R$, definida como $T (u, v) = (x,y)$, se dice que es una transformación uno a uno si no hay dos puntos asignados al mismo punto de imagen.
Para mostrar que $T$ es una transformación uno a uno, asumimos $T (u_1, v_1) = T (u_2, v_2)$ y mostramos que, como consecuencia, obtenemos $(u_1, v_1) = (u_2, v_2)$. Si la transformación $T$ es uno a uno en el dominio $G$, entonces la inversa $T^{-1}$ existe con el dominio $R$ de manera que $T^{-1} ∘ T$ y $T ∘ T^{-1}$ son funciones de identidad.
La muestra el mapeo $T (u, v) = (x,y)$ donde $x$ e $y$ están relacionados con $u$ y $v$ por las ecuaciones $x = g (u, v)$ e $y = h (u, v)$. La región $G$ es el dominio de $T$ y la región $R $es el rango de $T$, también conocida como la imagen de $G$ bajo la transformación $T$
Determinando cómo funciona la transformación
Supón que una transformación $T$ se define como $T (r, θ) = (x,y)$ donde $x = r cos θ, y = r sen θ$. Encuentra la imagen del rectángulo polar $G = \{ (r, θ) | 0 \lt r \le 1, 0 \le θ \le π/2\}$ en el plano $rθ$ a una región $R$ en el plano $xy$. Demuestre que $T$ es una transformación uno a uno en $G$ y encuentra $T^{-1} (x,y)$.
Encontrando la imagen bajo $T$
Sea la transformación $T$ definida por $T (u, v) = (x,y)$ donde $x = u^2 - v^2$ e $y = uv$. Encuentra la imagen del triángulo en el plano $uv$ con vértices $(0, 0), (0, 1) y (1, 1)$.
Recuerda que mencionamos cerca del comienzo de esta sección que cada una de las funciones componentes debe tener primeras derivadas parciales continuas, lo que significa que $g_u, g_v, h_u$ y $h_v$ existen y también son continuas. Una transformación que tiene esta propiedad se llama transformación $C^1$ (aquí $C$ denota continua). Sea $T (u, v) = g (u, v), h (u, v)$, donde $x = g (u, v)$ y $y = h (u, v)$, una transformación $C^1$ uno a uno. Queremos ver cómo transforma una pequeña región rectangular $S$, $Δ u$ unidades por $Δ v$ unidades, en el plano $uv$ (ver la ).
Como $x = g (u, v)$ y $y = h (u, v)$, tenemos el vector de posición $\bold{r} (u, v) = g (u, v)\bold{i} + h (u, v)\bold{j}$ de la imagen de el punto $(u, v)$. Supón que $(u_0, v_0)$ es la coordenada del punto en la esquina inferior izquierda que se asigna a $(x_0, y_0) = T (u_0, v_0)$.
La línea $v = v:0$ se asigna a la curva de la imagen con la función vectorial $r(u, v_0)$, y el vector tangente en $(x_0, y_0)$ a la curva de la imagen es
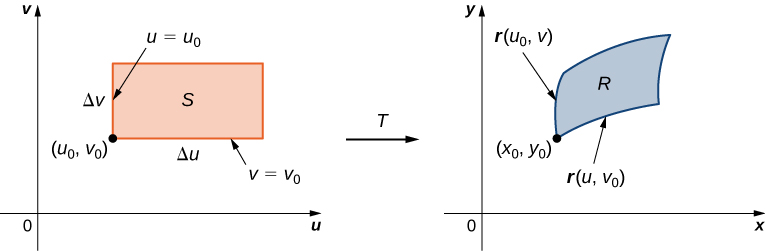
De manera similar, la línea $u = u_0$ se asigna a la curva de la imagen con la función vectorial $r (u_0, v)$, y el vector tangente en $(x_0, y_0)$ a la curva de la imagen es
$$\bold{r}_v = g_v(u_0, v_0)\bold{i} + h_v(u_0, v_0)\bold{j} = \frac{∂ x}{∂ v}\bold{i} + \frac{∂ y}{∂ v}\bold{j}$$Ahora, observa que
$$\bold{r}_u = \lim\limits_{Δ u \to 0} \frac{\bold{r}(u_0 + Δ u, v_0)}{Δ u}\;\;\rarr\;\;\bold{r}(u_0 + Δ u, v_0) - \bold{r}(u_0, v_0) \approx Δ u\bold{r}_u$$Similarmente,
$$\bold{r}_v = \lim\limits_{Δ v \to 0} \frac{\bold{r}(u_0, v_0 + Δ v)}{Δ v}\;\;\rarr\;\;\bold{r}(u_0, v_0 + Δ v) - \bold{r}(u_0, v_0) \approx Δ v\bold{r}_v$$Esto nos permite estimar el área $Δ A$ de la imagen $R$ encontrando el área del paralelogramo formado por los lados $Δ v\bold{r}_v$ y $Δ u\bold{r}_u$.
Al usar el producto cruz de estos dos vectores sumando el componente $\bold{k}$-ésimo como $0$, el área $Δ A$ de la imagen $R $ es aproximadamente $|Δ u\bold{r}_u × Δ v\bold{r}_v | = |\bold{r}_u × \bold{r}_v |Δ uΔ v$. En forma determinante, el producto cruz es
$$\begin{vmatrix} \bold{i} & \bold{j} & \bold{k}\\ \frac{∂ x}{∂ u} & \frac{∂ y}{∂ u} & 0\\ \frac{∂ x}{∂ v} & \frac{∂ y}{∂ v} & 0 \end{vmatrix}= \begin{vmatrix} \frac{∂ x}{∂ u} & \frac{∂ y}{∂ u}\\ \frac{∂ x}{∂ v} & \frac{∂ y}{∂ v} \end{vmatrix}\bold{k}= \bigg(\frac{∂ x}{∂ u}\frac{∂ y}{∂ v} - \frac{∂ x}{∂ v}\frac{∂ y}{∂ u}\bigg)\bold{k}$$Ya que $|\bold{k}| = 1$, tenemos $Δ A \approx |\bold{r}_u × \bold{r}_v|Δ uΔ v = \big(\frac{∂ x}{∂ u}\frac{∂ y}{∂ v} - \frac{∂ x}{∂ v}\frac{∂ y}{∂ u}\big)Δ uΔ v$.
El Jacobiano de la transformación $C^1$: $T(u, v) (g(u,v), h(u,v))$ es denotado por $J(u, v)$ y es definido por el determinante
$$J(u, v) = \bigg|\frac{∂(x,y)}{∂(u, v)}\bigg| = \begin{vmatrix} \frac{∂ x}{∂ u} & \frac{∂ y}{∂ u}\\ \frac{∂ x}{∂ v} & \frac{∂ y}{∂ v} \end{vmatrix} = \bigg(\frac{∂ x}{∂ u}\frac{∂ y}{∂ v} - \frac{∂ x}{∂ v}\frac{∂ y}{∂ u}\bigg)$$Usando la definición, tenemos
$$Δ A \approx J(u,v)Δ uΔ v = \bigg|\frac{∂(x,y)}{∂(u, v)}\bigg|Δ uΔ v$$Ten en cuenta que el Jacobiano es frecuentemente denotado por la forma simple:
$$J(u,v) = \frac{∂(x,y)}{∂(u, v)}$$Ten en cuenta también que
$$\begin{vmatrix} \frac{∂ x}{∂ u} & \frac{∂ y}{∂ u}\\ \\ \frac{∂ x}{∂ v} & \frac{∂ y}{∂ v} \end{vmatrix} = \bigg(\frac{∂ x}{∂ u}\frac{∂ y}{∂ v} - \frac{∂ x}{∂ v}\frac{∂ y}{∂ u}\bigg) = \begin{vmatrix} \frac{∂ x}{∂ u} & \frac{∂ x}{∂ v}\\ \frac{∂ y}{∂ u} & \frac{∂ y}{∂ v} \end{vmatrix}$$De ahí la notación $J(u, v) = \frac{∂(x,y)}{∂(u, v)}$ sugiere que podemos escribir el determinante jacobiano con parciales de $x$ en la primera fila y parciales de $y$ en la segunda fila.
Encontrando el Jacobiano
En uno de los ejercicios anteriores, encontramos que la transformación era $T (r, θ) = (r cos θ, r sen θ)$ donde $x = r cos θ$ y $y = r sen θ$. Encuentra el Jacobiano.
Encontrando el Jacobiano
En otro de los ejercicios anteriores, encontramos que la transformación era $T(u, v) = \big(u^2 - v^2, uv\big)$ donde $x = u^2 - v^2$ y $y = uv$. Encuentra el Jacobiano.
Ya hemos visto que, bajo el cambio de variables $T (u, v) = (x,y)$ donde $x = g (u, v)$ y $y = h (u, v)$, una pequeña región $Δ A$ en el plano $xy$ está relacionado con el área formada por el producto $Δ uΔ v$ en el plano $uv$ por la aproximación
$$Δ A \approx J(u,v)Δ uΔ v$$Ahora volvamos a la definición de integral doble por un momento:
$$\iint_R f(x,y)dA = \lim\limits_{m,n \to \infin}\sum_{i=1}^m\sum_{j=1}^n f(x_{ij}, y_{ij})Δ A$$Con referencia a la , observa que dividimos la región $S$ en el plano $uv$ en pequeños subrectángulos $S_{ij}$ y dejamos que los subrectángulos $R_{ij}$ en el plano $xy$ sean las imágenes de $S_{ij}$ bajo la transformación $T (u, v) = (x,y)$.
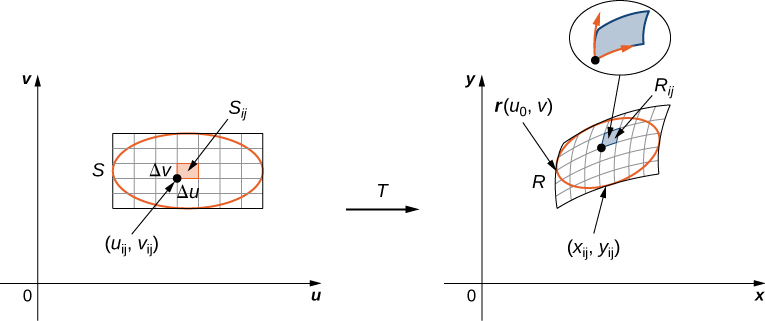
Entonces la integral doble se convierte en
$$\begin{aligned} \iint_R f(x,y)dA &= \lim\limits_{m,n \to \infin}\sum_{i=1}^m\sum_{j=1}^n f(x_{ij}, y_{ij})Δ A\\ &= \lim\limits_{m,n \to \infin}\sum_{i=1}^m\sum_{j=1}^n f(g(u_{ij}, v_{ij}), h(u_{ij}, v_{ij}))|J(u_{ij}, v_{ij})|Δ uΔ v \end{aligned}$$
Observa que esta es exactamente la suma de Riemann para la integral doble
$$\iint_S f(g(u,v)), h(u,v))\bigg|\frac{∂(x,y)}{∂(u,v)}\bigg|dudv$$Cambio de variables para integrales dobles
Sea $T (u, v) = (x,y)$ donde $x = g (u, v)$ $y y = h (u, v)$ sea una transformación $C^1$ uno a uno, con un jacobiano distinto de cero en el interior de la región $S$ en el plano $uv$; mapea $S$ en la región $R$ en el plano $xy$. Si $f$ es continua en $R$, entonces
Con este teorema para integrales dobles, podemos cambiar las variables de $(x,y)$ a $(u, v)$ en una integral doble simplemente reemplazando
cuando usamos las sustituciones $x = g (u, v)$ y $y = h (u, v)$ y luego cambiamos los límites de integración en consecuencia, este cambio de variables a menudo simplifica mucho los cálculos.
Antes de realizar el primer ejercicio de este apartado, te invitamos a que explores la siguiente escena interactiva, diseñada por Elena Álvarez, en la que se muestra la interpretación geométrica del Jacobiano. Dada una transformación afin, el valor absoluto del jacobiano actúa como un factor de escala entre el área del rectángulo inicial y su transformado.
Observa que, en el caso de cualquier transformación, el jacobiano actúa como un factor de dilatación de las áreas a pequeña escala. Elegida la opción de Transformación Afín, se muestran distintos ejemplos en los que se observa la relación entre el área de una región y el área de la región transformada.
Para el caso de transformaciones no afines, la escena permite explorar el cambio a coordenadas polares.
Antes de interactuar con la escena, observa el vídeo que explica cómo hacerlo.
Cambio de variables de coordenadas rectangulares a polares
Considera la integral
$$\int_0^2\int_0^{\sqrt{2x-x^2}} \sqrt{x^2+y^2}dydx$$Usa el cambio de variables $x = r cos θ$ y $y = r sen θ$, y encuentra la integral resultante
Observa en el siguiente ejercicio que la región sobre la que vamos a integrar puede sugerir una transformación adecuada para la integración. Ésta es una situación común e importante.
Cambiando variables
Considera la integral $\iint_R (x - y) dy dx$, donde $R$ es el paralelogramo que une los puntos $(1, 2), (3, 4), (4, 3)$ y $(6, 5)$ (). Realiza los cambios apropiados de variables y escribe la integral resultante.
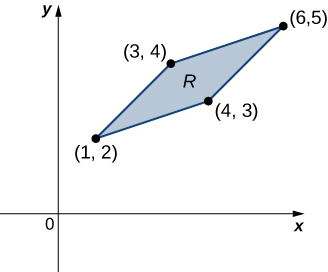
Estamos listos para dar una estrategia de resolución de problemas para el cambio de variables.
En el siguiente ejercicio, encontraremos una sustitución que simplifica mucho el cálculo del integrando.
Evaluando una integral
Usando el cambio de variables $u = x - y$ y $v = x + y$, evalúa la integral
$$\iint_R (x-y)e^{x^2-y^2}dA$$donde $R$ es la región delimitada por las líneas $x + y = 1$ y $x + y = 3$ y las curvas $x^2 - y^2 = -1$ y $x^2 - y^2 = 1$ (ver la primera región en la ().
El cambio de variables en integrales triples funciona exactamente de la misma manera. Las sustituciones de coordenadas cilíndricas y esféricas son casos especiales de este método, que demostramos aquí. Supón que $G$ es una región en el espacio $uvw$ y se asigna a $D$ en el espacio $xyz$ () mediante una transformación $C^1$ uno a uno $T (u, v, w) = (x, y, z)$ donde $x = g (u, v, w), y = h (u, v, w)$ y $z = k (u, v, w)$
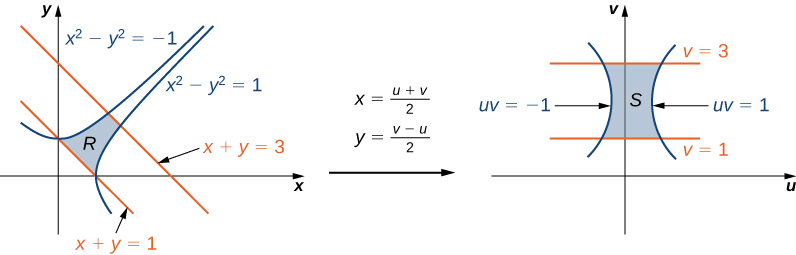
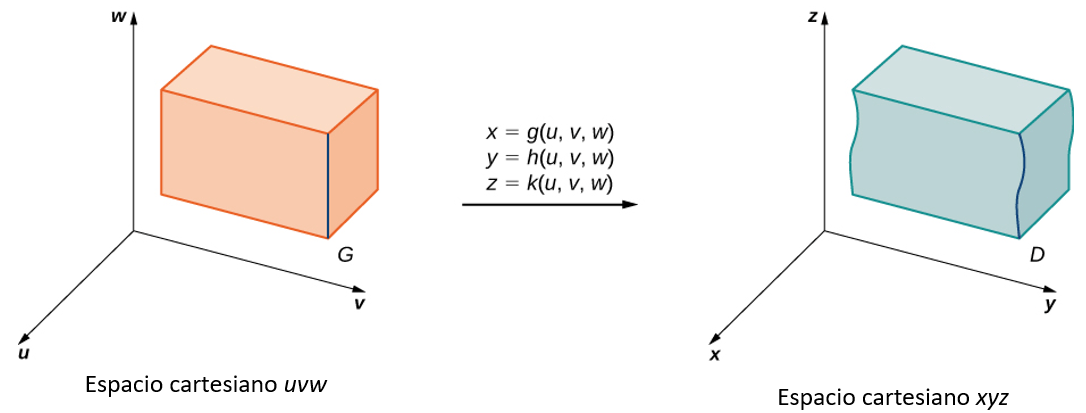
Entonces, cualquier función $F (x, y, z)$ definida en $D$ puede considerarse como otra función $H (u, v, w)$ que está definida en $G$:
$$F (x, y, z) = F(g (u, v, w), h (u, v, w), k (u, v, w)) = H (u, v, w)$$Ahora necesitamos definir el jacobiano para tres variables.
El determinante jacobiano $J (u, v, w)$ en tres variables se define de la siguiente manera:
$$J(u, v,w) = \begin{vmatrix} \frac{∂ x}{∂ u} & \frac{∂ y}{∂ u} & \frac{∂ z}{∂ u}\\ \\ \frac{∂ x}{∂ v} & \frac{∂ y}{∂ v} & \frac{∂ z}{∂ v}\\ \\ \frac{∂ x}{∂ w} & \frac{∂ y}{∂ w} & \frac{∂ z}{∂ w} \end{vmatrix}$$Esto también es lo mismo que
$$J(u, v,w) = \begin{vmatrix} \frac{∂ x}{∂ u} & \frac{∂ x}{∂ v} & \frac{∂ x}{∂ w}\\ \\ \frac{∂ y}{∂ u} & \frac{∂ y}{∂ v} & \frac{∂ y}{∂ w}\\ \\ \frac{∂ z}{∂ u} & \frac{∂ z}{∂ v} & \frac{∂ z}{∂ w} \end{vmatrix}$$El Jacobiano también se puede denotar simplemente como $\frac{∂(x,y,z)}{∂(u,v,w)}$
Con las transformaciones y el Jacobiano para tres variables, estamos listos para establecer el teorema que describe el cambio de variables para integrales triples.
Sea $T (u, v, w) = (x, y, z)$ donde $x = g (u, v, w), y = h (u, v, w)$ y $z = k (u, v, w )$, sea un $C^1$ una transformación uno a uno, con un Jacobiano distinto de cero, que mapea la región $G$ en el plano $uvw$ en la región $D$ en el plano $xyz$. Como en el caso bidimensional, si $F$ es continua en $D$, entonces
$\displaystyle\iiint_R F(x,y,z)dV$ $$\begin{aligned} &= \iint_G F(g(u,v,w), h(u,v,w), k(u,v,w))\big|\frac{∂(x,y,z)}{∂(u,v,w)}\big|dudvdw\\ &= \iiint_G H(u,v,w)|J(u,v,w)|dudvdw \end{aligned}$$Veamos ahora cómo los cambios en integrales triples para coordenadas cilíndricas y esféricas se ven afectados por este teorema. Esperamos obtener las mismas fórmulas que en las integrales triples en coordenadas cilíndricas y esféricas.
Obtención de fórmulas en integrales triples para coordenadas cilíndricas y esféricas
Derivar la fórmula en integrales triples para
Probemos con otro ejercicio con una sustitución diferente.
Evaluación de una integral triple con cambio de variables
Evaluar la integral triple
en el espacio $xyz$ usando la transformación
Luego integra sobre una región apropiada en el espacio $uvw$
En los siguientes ejercicios, la función $T: S \rarr R, T (u, v) = (x,y)$ en la región $S = \{ (u, v) | 0 \le u \le 1, 0 \le v \le 1\}$ acotada por el cuadrado unitario está dada, donde $R \subset R^2$ es la imagen de $S$ debajo de $T$.
En los siguientes ejercicios, determina si las transformaciones $T: S \rarr R$ son uno a uno o no.
En los siguientes ejercicios, las transformaciones $T: S \rarr R$ son uno a uno. Encuentra sus transformaciones inversas relacionadas $T^{-1}: R \rarr S$.
En los siguientes ejercicios, la transformación $T: S \rarr R, T (u, v) = (x,y)$ y la región $R \subset R^2$ son dadas. Encuentra la región $S \subset R^2$.
En los siguientes ejercicios, encuentra la J jacobiana de la transformación.
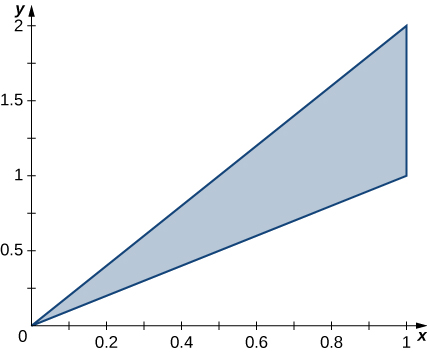

En los siguientes ejercicios, usa la transformación $u = y - x, v = y$, para evaluar las integrales en el paralelogramo $R$ de vértices $(0, 0), (1, 0), (2, 1)$ y $(1, 1)$ que se muestra en la siguiente figura.
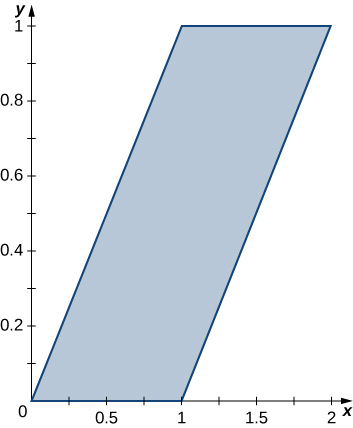
En los siguientes ejercicios, usa la transformación $y - x = u, x + y = v$ para evaluar las integrales en el cuadrado $R$ determinado por las líneas $y = x, y = -x + 2, y = x + 2$, y $y = -x$ se muestra en la siguiente figura
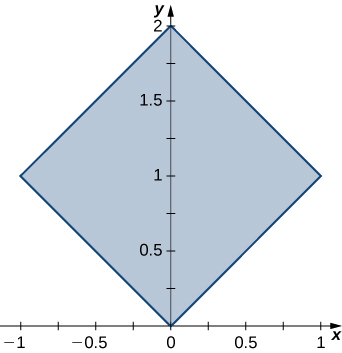
En los siguientes ejercicios, usa la transformación $x = u, 5y = v$ para evaluar las integrales en la región $R $limitada por la elipse $x^2 + 25y^2 = 1$ que se muestra en la siguiente figura.
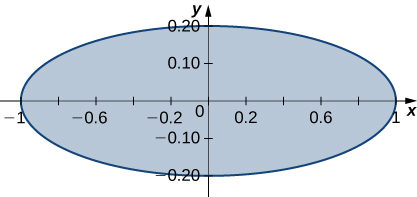
En los siguientes ejercicios, usa la transformación $u = x + y, v = x - y$ para evaluar las integrales en la región trapezoidal $R$ determinadas por los puntos $(1, 0), (2, 0), (0, 2)$, y $(0, 1)$ que se muestran en la siguiente figura.
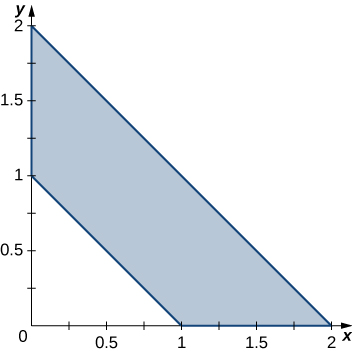
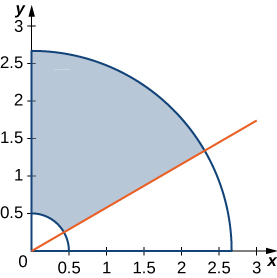
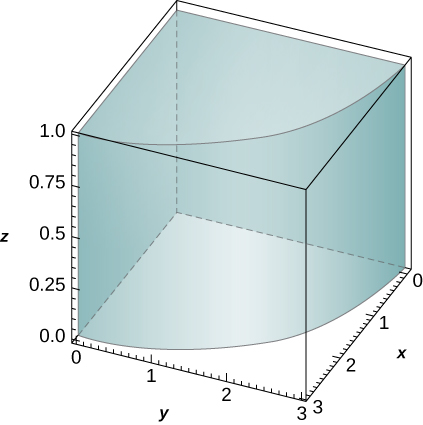
$T_{2, 3, 5} (u, v, w) = (x, y, z)$ definida por $x = \frac{u}{2}, y = \frac{v}{3} y z = \frac{w}{5}$. Redondea tu respuesta a cuatro lugares decimales.

Para terminar este capítulo presentamos un escena interactiva de Juan Carlos Ponce Campuzano, en la cual se muestra la transformación parabólica $x = u^2- v^2$ y $y= 2v$. El Jacobiano establece una relación entre el área del cuadrado azul (izquierda) y el área de la región roja (derecha).
Arrastra el punto verde (a la izquierda) para cambiar la posición del cuadrado azul. Observa lo que le sucede a la región roja. También, puedes arrastrar el control deslizante, que determina el lado del cuadrado azul y observar lo que le sucede a la región roja
Los huracanes son grandes tormentas que pueden producir enormes daños a la vida y la propiedad, especialmente cuando llegan a tierra. Predecir dónde y cuándo atacarán y qué tan fuertes serán los vientos es de gran importancia para prepararse para la protección o la evacuación. Los científicos se basan en estudios de campos vectoriales rotacionales para sus pronósticos.
En este capítulo, aprenderemos a modelar nuevos tipos de integrales sobre campos como campos magnéticos, campos gravitacionales o campos de velocidad.
También aprenderemos a calcular el trabajo realizado en una partícula cargada que viaja a través de un campo magnético, el trabajo realizado en una partícula con masa que viaja a través de un campo gravitacional y el volumen por unidad de tiempo del agua que fluye a través de una red arrojada a un río.
Todas estas aplicaciones se basan en el concepto de campo vectorial, que exploramos en este capítulo. Los campos vectoriales tienen muchas aplicaciones porque se pueden usar para modelar campos reales como campos electromagnéticos o gravitacionales. Una comprensión profunda de la física o la ingeniería es imposible sin una comprensión de los campos vectoriales. Además, los campos vectoriales tienen propiedades matemáticas que merecen ser estudiadas por derecho propio. En particular, los campos vectoriales se pueden utilizar para desarrollar varias versiones de dimensiones superiores del Teorema Fundamental del Cálculo.
Los campos vectoriales son una herramienta importante para describir muchos conceptos físicos, como la gravitación y el electromagnetismo, que afectan el comportamiento de los objetos en una gran región de un plano o del espacio. También son útiles para hacer frente a comportamientos a gran escala, como tormentas atmosféricas o corrientes oceánicas de profundidad.
En esta sección, examinamos las definiciones básicas y los gráficos de los campos vectoriales para poder estudiarlos con más detalle en el resto de este capítulo.
¿Cómo podemos modelar la fuerza gravitacional ejercida por múltiples objetos astronómicos?
¿Cómo podemos modelar la velocidad de las partículas de agua en la superficie de un río? La ofrece representaciones visuales de tales fenómenos.
La (a) muestra un campo gravitacional ejercido por dos objetos astronómicos, como una estrella y un planeta o un planeta y una luna. En cualquier punto de la figura, el vector asociado con un punto da la fuerza gravitacional neta ejercida por los dos objetos sobre un objeto de unidad de masa. Los vectores de mayor magnitud en la figura son los vectores más cercanos al objeto más grande. El objeto más grande tiene mayor masa, por lo que ejerce una fuerza gravitacional de mayor magnitud que el objeto más pequeño.
La (b) muestra la velocidad de un río en puntos de su superficie. El vector asociado con un punto dado en la superficie del río da la velocidad del agua en ese punto. Dado que los vectores a la izquierda de la figura son de magnitud pequeña, el agua fluye lentamente en esa parte de la superficie. A medida que el agua se mueve de izquierda a derecha, encuentra algunos rápidos alrededor de una roca. La velocidad del agua aumenta y se produce un remolino en parte de los rápidos.
Cada figura ilustra un ejemplo de un campo vectorial. Intuitivamente, un campo vectorial es un mapa de vectores. En esta sección, estudiaremos campos vectoriales en $ℝ^2$ y $ℝ^3$.

Un campo vectorial $\bold{F}$ en $ℝ^2$ es una asignación de un vector bidimensional $\bold{F} (x,y)$ a cada punto $(x,y)$ de un subconjunto $D$ de $ℝ^2$. El subconjunto $D$ es el dominio del campo vectorial.
Un campo vectorial $\bold{F}$ en $ℝ^3$ es una asignación de un vector tridimensional $\bold{F} (x, y, z)$ a cada punto $(x, y, z)$ de un subconjunto $D$ de $ℝ^3$. El subconjunto $D$ es el dominio del campo vectorial.
Un campo vectorial en $ℝ^2$ se puede representar de dos formas equivalentes. La primera forma es usar un vector con componentes que sean funciones de dos variables:
$$\bold{F}(x,y) = ⟨P(x,y), Q(x,y) ⟩\tag{$6.1$}$$La segunda forma es usar los vectores unitarios estándar:
$$\bold{F}(x,y) = P(x,y)\bold{i} + Q(x,y)\bold{j} ⟩\tag{$6.2$}$$Se dice que un campo vectorial es continuo si sus funciones componentes son continuas.
Encontrando un vector asociado a un punto dado
Sea $\bold{F} (x,y) = (2y^2 + x - 4)\bold{i} + cos\; (x)\bold{j}$ un campo vectorial en $ℝ^2$. Ten en cuenta que este es un ejemplo de un campo vectorial continuo, ya que ambas funciones componentes son continuas. ¿Qué vector está asociado con el punto $(0, -1)$?
Ahora podemos representar un campo vectorial en términos de sus componentes de funciones o vectores unitarios, pero representarlo visualmente es más complejo porque el dominio de un campo vectorial está en $ℝ^2$, al igual que el rango. Por lo tanto, la “gráfica” de un campo vectorial en $ℝ^2$ vive en un espacio de cuatro dimensiones. Como no podemos representar visualmente el espacio de cuatro dimensiones, en su lugar dibujamos campos vectoriales en $ℝ^2$ en un plano. Para hacer esto, dibuja el vector asociado con un punto dado en el punto de un plano.
Por ejemplo, supón que el vector asociado con el punto $(4, -1)$ es $⟨3, 1⟩$. Entonces, dibujaríamos el vector $⟨3, 1⟩$ en el punto $(4, -1)$.
Deberíamos trazar suficientes vectores para ver la forma general, pero no tantos como para que el boceto se convierta en un desorden. Si tuviéramos que trazar el vector de imagen en cada punto de la región, llenaría la región completamente y sería inútil.
En su lugar, podemos elegir puntos en las intersecciones de las líneas de la cuadrícula y trazar una muestra de varios vectores de cada cuadrante de un sistema de coordenadas rectangular en $ℝ^2$.
Hay dos tipos de campos vectoriales en $ℝ^2$ en los que se centra este capítulo: campos radiales y campos rotacionales. Los campos radiales modelan ciertos campos gravitacionales y campos de fuentes de energía, y los campos rotacionales modelan el movimiento de un fluido en un vórtice. En un campo radial, todos los vectores apuntan directamente hacia o directamente lejos del origen. Además, la magnitud de cualquier vector depende solo de su distancia al origen. En un campo radial, el vector ubicado en el punto $(x,y)$ es perpendicular al círculo centrado en el origen que contiene el punto $(x,y)$, y todos los demás vectores de este círculo tienen la misma magnitud.
Dibujando un campo vectorial radial
Dibuja el campo vectorial $\bold{F} (x,y) = \frac{x}{2}\bold{i} + \frac{y}{2}\bold{j}$
En contraste con los campos radiales, en un campo rotacional, el vector en el punto $(x,y)$ es tangente (no perpendicular) a un círculo con radio $r = \sqrt{x^2 + y^2}$. En un campo rotacional estándar, todos los vectores apuntan en el sentido de las agujas del reloj o en el sentido contrario a las agujas del reloj, y la magnitud de un vector depende solo de su distancia desde el origen.
Los dos ejercicios siguientes son campos de rotación en el sentido de las agujas del reloj, y vemos por sus representaciones visuales que los vectores parecen girar alrededor del origen.
Apertura de capítulo: Dibujar un campo vectorial rotacional

Dibuja el campo vectorial $\bold{F} (x,y) = ⟨y, -x⟩$
Dibujar un campo vectorial
Dibuja el campo vectorial $\bold{F} (x,y) = \frac{y}{x^2+y^2}\bold{i} + \frac{x}{x^2+y^2}\bold{j}$
Campo de velocidad de un fluido
Supón que $\bold{v} (x,y) = -\frac{2y}{x^2+y^2}\bold{i} + \frac{2x}{x^2+y^2}\bold{j}$ es el campo de velocidad de un fluido ¿Qué tan rápido se mueve el fluido en el punto ($1, -1)$? (supóna que las unidades de velocidad son metros por segundo).
Hemos examinado campos vectoriales que contienen vectores de diversas magnitudes, pero así como tenemos vectores unitarios, también podemos tener un campo vectorial unitario. Un campo vectorial $\bold{F}$ es un campo vectorial unitario si la magnitud de cada vector en el campo es $1$. En un campo vectorial unitario, la única información relevante es la dirección de cada vector.
Un campo vectorial unitario
Demuestra que el campo vectorial
$$\bold{F} = \bigg⟨\frac{y}{\sqrt{x^2+y^2}} - \frac{x}{\sqrt{x^2+y^2}}\bigg⟩$$es un campo vectorial unitario.
¿Por qué son importantes los campos vectoriales unitarios? Supongamos que estamos estudiando el flujo de un fluido y que solo nos importa la dirección en la que fluye el fluido en un punto dado. En este caso, la velocidad del fluido (que es la magnitud del vector de velocidad correspondiente) es irrelevante, porque lo único que nos importa es la dirección de cada vector. Por lo tanto, el campo vectorial unitario asociado con la velocidad es el campo que estudiaríamos. Si $\bold{F} = ⟨P, Q, R⟩$ es un campo vectorial, entonces el campo vectorial unitario correspondiente es $⟨\frac{P}{||\bold{F}||}, \frac{Q}{||\bold{F}||}, \frac{R}{||\bold{F}||}⟩$. Observa que si $\bold{F} (x,y) = ⟨y, -x⟩$, entonces la magnitud de $\bold{F}$ es $\sqrt{x^2 + y^2}$ y, por lo tanto, el campo vectorial unitario correspondiente es el campo $G$ del ejemplo anterior.
Si $\bold{F}$ es un campo vectorial, entonces el proceso de dividir $\bold{F}$ por su magnitud para formar el campo vectorial unitario $\bold{F} /|| \bold{F} ||$ se llama normalizar el campo $\bold{F}$.
Antes de continuar con el siguiente apartado, interactúa con la siguiente escena, diseñada por Juan Carlos Ponce Campuzano, en la cual puedes modificar los componentes vectoriales; por ejemplo, intenta hacerlo con $\bold{F} (x,y) = \frac{y}{x^2+y^2}\bold{i} + \frac{x}{x^2+y^2}\bold{j}$
Recuerda que expresiones como $\frac{y}{x^2+y^2}$, en GeoGebra, se escriben así:
y/sqrt(x^2+y^2)
Hemos visto varios ejemplos de campos vectoriales en $ℝ^2$; ahora dirijamos nuestra atención a los campos vectoriales en $ℝ^3$. Estos campos vectoriales se pueden usar para modelar campos gravitacionales o electromagnéticos, y también se pueden usar para modelar el flujo de fluidos o el flujo de calor en tres dimensiones.
Un campo vectorial bidimensional en realidad solo puede modelar el movimiento del agua en un segmento bidimensional de un río (como la superficie del río). Dado que un río fluye a través de tres dimensiones espaciales, para modelar el flujo de toda la profundidad del río, necesitamos un campo vectorial en tres dimensiones.
La dimensión adicional de un campo tridimensional puede hacer que los campos vectoriales en $ℝ^3$ sean más difíciles de visualizar, pero la idea es la misma. Para visualizar un campo vectorial en $ℝ^3$, traza suficientes vectores para mostrar la forma general. Podemos usar un método similar para visualizar un campo vectorial en $ℝ^2$ eligiendo puntos en cada octante.
Al igual que con los campos vectoriales en $ℝ^2$, podemos representar campos vectoriales en $ℝ^3$ con las funciones componentes. Simplemente necesitamos una función de componente adicional para la dimensión adicional. Escribimos ya sea
$$\bold{F}(x, y, z) = ⟨P(x, y, z), Q(x, y, z), R(x, y, z)⟩ \tag{$6.3$}$$o
$$\bold{F}(x, y, z) = P(x, y, z)\bold{i} + Q(x, y, z)\bold{j} + R(x, y, z)\bold{k} \tag{$6.4$}$$
Dibujar un campo vectorial en tres dimensiones
Describe el campo vectorial $\bold{F} (x, y, z) = ⟨1, 1, z⟩$
En el siguiente ejercicio, exploraremos uno de los casos clásicos de un campo vectorial tridimensional: un campo gravitacional.
Describiendo un campo vectorial gravitacional
La ley de gravitación de Newton establece que $\bold{F} = -G\frac{m_1 m_2}{r^2}\hat{\bold{r}}$, donde $G$ es la constante gravitacional universal. Describe el campo gravitacional que ejerce un objeto (objeto 1) de masa $m_1$ ubicado en el origen sobre otro objeto (objeto 2) de masa $m_2$ ubicado en el punto $(x, y, z)$. El campo $\bold{F}$ denota la fuerza gravitacional que el objeto 1 ejerce sobre el objeto 2, $r$ es la distancia entre los dos objetos y $\hat{\bold{r}}$ indica el vector unitario desde el primer objeto hasta el segundo. El signo menos muestra que la fuerza gravitacional atrae hacia el origen; es decir, la fuerza del objeto 1 es atractiva. Dibuja el campo vectorial asociado con esta ecuación.
En esta sección, estudiaremos un tipo especial de campo vectorial llamado campo gradiente o campo conservativo. Estos campos vectoriales son extremadamente importantes en física porque se pueden usar para modelar sistemas físicos en los que se conserva la energía. Los campos gravitacionales y los campos eléctricos asociados con una carga estática son ejemplos de campos gradiente. Recuerda que si $f$ es una función (escalar) de $x$ e $y$, entonces el gradiente de $f$ es
Podemos ver la forma en que está escrito el gradiente que $∇ f$ es un campo vectorial en $ℝ^2$. De manera similar, si $f$ es una función de $x, y$ y $z$, entonces el gradiente de $f$ es
$$grad f = ∇ f = f_x(x, y,z)\bold{i} + f_y(x, y,z)\bold{j} + f_z(x, y,z)\bold{k}$$El gradiente de una función de tres variables es un campo vectorial en $ℝ^3$. Un campo gradiente es un campo vectorial que se puede escribir como el gradiente de una función, y tenemos la siguiente definición.
Un campo vectorial $\bold{F}$ en $ℝ^2$ o en $ℝ^3$ es un campo gradiente si existe una función escalar $f$ tal que $∇ f = \bold{F}$.
Dibujar un campo vectorial gradiente
Usa la tecnología para trazar el campo vectorial gradiente de $f(x,y) = x^2y^2$
Considera la función $f(x,y) = x^2y^2$ del ejercicio anterior. La muestra las curvas de nivel de esta función superpuestas en el campo vectorial gradiente de la función.
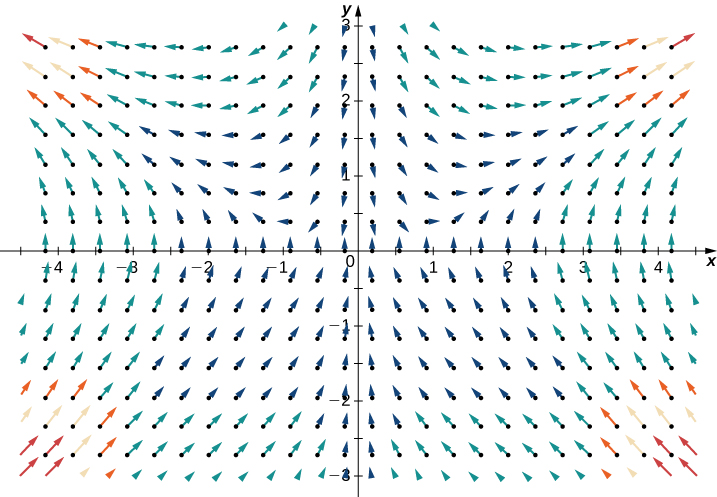
Los vectores gradiente son perpendiculares a las curvas de nivel, y las magnitudes de los vectores se hacen más grandes a medida que las curvas de nivel se acercan, porque las curvas de nivel agrupadas de cerca indican que el gráfico es empinado y la magnitud del vector gradiente es el valor más grande de la derivada direccional. Por lo tanto, puedes ver la inclinación local de un gráfico investigando el campo gradiente de la función correspondiente.
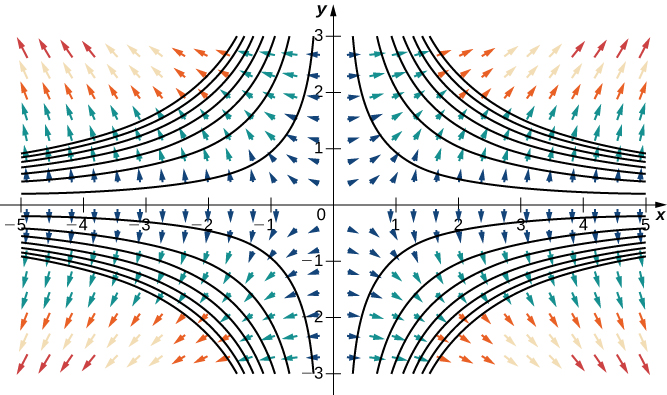
Interactúa con la siguiente escena, diseñada por Elena E. Álvarez Sáiz, en la cual se representa un campo gradiente. Observa que en el caso de un campo vectorial gradiente, en cada punto $P(x,y)$ el vector gradiente es ortogonal a la curva de nivel que pasa por dicho punto.
Se debe incluir la función escalar $f(x,y)$ y las coordenadas del campo gradiente, $M(x,y)$ y $N(x,y)$. En el caso de representar las curvas de nivel $f(x,y)=k$, se debe introducir el valor de $K$.
Cambia la función por la usada en los ejercicios anteriores: $x^2y^2$, donde $M(x,y) = 2xy^2$ y $N(x,y) = 2x^2y$.
Como aprendimos anteriormente, un campo vectorial $\bold{F}$ es un campo vectorial conservativo, o un campo gradiente si existe una función escalar $f$ tal que $∇ f = \bold{F}$. En esta situación, $f$ se denomina función potencial para $\bold{F}$. Surgen campos vectoriales conservativos en muchas aplicaciones, particularmente en física. La razón por la que estos campos se denominan conservativos es que modelan fuerzas de sistemas físicos en los que se conserva la energía. Estudiaremos los campos vectoriales conservativos con más detalle más adelante en este capítulo.
Puedes notar que, en algunas aplicaciones, una función potencial $f$ para $\bold{F}$ se define en cambio como una función tal que $-∇ f = \bold{F}$. Este es el caso de ciertos contextos en física; por ejemplo, observa el siguiente ejercicio.
Verificación de una función potencial
¿Es $f (x, y, z) = x^2yz - sen (xy)$ una función potencial para el campo vectorial
$$\bold{F}(x,y,z) = ⟨2xyz - y cos(xy), x^2z - x cos(xy), x^2y⟩$$
Verificación de una función potencial
La velocidad de un fluido se modela mediante el campo $\bold{v} (x,y) = ⟨xy, \frac{x^2}{2}- y⟩$. Verifica que $f (x,y) = \frac{x^2y}{2} - \frac{y^2}{2}$ sea una función potencial para $\bold{v}$.
Si $\bold{F}$ es un campo vectorial conservativo, entonces hay al menos una función potencial $f$ tal que $∇ f = \bold{F}$. Pero, ¿podría haber más de una función potencial? Si es así, ¿existe alguna relación entre dos funciones potenciales para el mismo campo vectorial?
Antes de responder estas preguntas, recordemos algunos hechos del cálculo de una sola variable para guiar nuestra intuición. Recuerda que si $k (x)$ es una función integrable, entonces $k$ tiene infinitas antiderivadas. Además, si $F$ y $G$ son ambas antiderivadas de $k$, entonces $F$ y $G$ difieren solo por una constante. Es decir, hay un número $C$ tal que $F (x) = G (x) + C$.
Ahora sea $\bold{F}$ un campo vectorial conservativo y sean $f$ y $g$ funciones potenciales para $\bold{F}$. Dado que el gradiente es como una derivada, $\bold{F}$ siendo conservativo significa que $\bold{F}$ es "integrable" con las "antiderivadas" $f$ y $g$. Por lo tanto, si la analogía con el cálculo de una sola variable es válida, esperamos que haya alguna constante $C$ tal que $f (x) = g (x) + C$. El siguiente teorema dice que este es realmente el caso.
Para enunciar el siguiente teorema con precisión, debemos asumir que el dominio del campo vectorial está conectado y abierto. Estar conectado significa que si $P_1$ y $P_2$ son dos puntos cualesquiera en el dominio, entonces puede caminar de $P_1$ a $P_2$ a lo largo de un camino que permanece completamente dentro del dominio.
Singularidad de las funciones potenciales
Sea $\bold{F}$ un campo vectorial conservativo en un dominio abierto y conectado y sean $f$ y $g$ funciones tales que $∇ f = \bold{F}$ y $∇ g = \bold{F}$. Entonces, hay una constante $C$ tal que $f = g + C$.
Dado que $f$ y $g$ son funciones potenciales para $\bold{F}$, entonces $∇ f = f - g = ∇ f - ∇ g = \bold{F} - \bold{F} = 0$. Sea $h = f - g$, entonces tenemos $∇ h = 0$. Nos gustaría demostrar que $h$ es una función constante.
Supón que $h$ es una función de $x$ e $y$ (la lógica de esta demostración se extiende a cualquier número de variables independientes). Como $∇ h = 0$, tenemos $h_x = 0$ e $h_y = 0$. La expresión $h_x = 0$ implica que $h$ es una función constante con respecto a $x$, es decir, $h (x,y) = k_1 (y)$ para alguna función $k_1$. De manera similar, $h_y = 0$ implica $h (x,y) = k_2 (x)$ para alguna función $k_2$. Por lo tanto, la función $h$ depende solo de $y$ y también depende solo de $x$. Por lo tanto, $h (x,y) = C$ para alguna constante $C $en el dominio conectado de $\bold{F}$. Observa que realmente necesitamos conectividad en este punto; si el dominio de $\bold{F}$ viene en dos piezas separadas, entonces $k$ podría ser una constante $C_1$ en una pieza pero podría ser una constante diferente $C_2$ en la otra pieza. Dado que $f - g = h = C$, tenemos que $f - g + C$, como se desea.
Los campos vectoriales conservativos también tienen una propiedad especial llamada propiedad parcial cruzada. Esta propiedad ayuda a probar si un campo vectorial dado es conservativo.
La propiedad transversal de los campos vectoriales conservativos
Sea $\bold{F}$ un campo vectorial en dos o tres dimensiones tal que las funciones componentes de $\bold{F}$ tengan derivadas parciales mixtas secundarias continuas en el dominio de $\bold{F}$.
Si $\bold{F} (x,y) = ⟨P (x,y), Q (x,y)⟩$ es un campo vectorial conservativo en $ℝ^2$, entonces $\frac{∂ P}{∂ y} = \frac{∂ Q}{∂ x}$. Si $\bold{F} (x, y, z) = ⟨P (x, y, z), Q (x, y, z), R (x, y, z)⟩$ es un campo vectorial conservativo en $ℝ^3$, entonces
$$\frac{∂ P}{∂ y} = \frac{∂ q}{∂ x}, \frac{∂ Q}{∂ z} = \frac{∂ R}{∂ y},\;\;\;\text{y}\;\;\; \frac{∂ R}{∂ x}\frac{∂ P}{∂ z}$$Como $\bold{F}$ es conservativa, hay una función $f (x,y)$ tal que $∇ f = \bold{F}$. Por lo tanto, según la definición del gradiente, $f_x = P$ y $f_y = Q$. Según el teorema de Clairaut, $f_{xy} = f_{yx}$, Pero, $f_{xy} = P_y$ y $f_{yx} = Q_x$, y por tanto $P_y = Q_x$.
El teorema de Clairaut proporciona una prueba rápida de la propiedad parcial cruzada de los campos vectoriales conservativos en $ℝ^3$, tal como lo hizo para los campos vectoriales en $ℝ^2$.
La propiedad transversal de los campos vectoriales conservativos muestra que la mayoría de los campos vectoriales no son conservativos. La propiedad de parciales cruzados es difícil de satisfacer en general, por lo que la mayoría de los campos vectoriales no tendrán parciales cruzados iguales.
Demostrar que un campo vectorial no es conservativo
Demuestra que el campo vectorial rotacional $\bold{F} (x,y) = ⟨y, -x⟩$ no es conservativo.
Demostrar que un campo vectorial no es conservativo
¿Es el campo vectorial $\bold{F} (x, y, z) = \big⟨7, -2, x^3\big⟩$ conservativo?
Concluimos esta sección con una advertencia: La propiedad de parciales cruzados de los campos vectoriales conservativos dice que si $\bold{F}$ es conservativo, $\bold{F}$ tiene la propiedad de parciales cruzados. El teorema no dice que, si $\bold{F}$ tiene la propiedad de parciales cruzados, entonces $\bold{F}$ es conservativo (el inverso de una implicación no es lógicamente equivalente a la implicación original).
En otras palabras, la propiedad entre parciales de los campos vectoriales conservativos solo puede ayudar a determinar que un campo no es conservativo; no le permite concluir que un campo vectorial sea conservativo. Por ejemplo, considera el campo vectorial $\bold{F} (x,y) = \big⟨x^2y, \frac{x^3}{3}\big⟩$. Este campo tiene la propiedad de parciales cruzados, por lo que es natural intentar usar la propiedad de parciales cruzados de los campos vectoriales conservativos para concluir que este campo vectorial es conservativo.
Sin embargo, esta es una mala aplicación del teorema. Más adelante aprenderemos cómo concluir que $\bold{F}$ es conservativo.
Para los siguientes ejercicios, determine si la afirmación es verdadera o falsa.
Para los siguientes ejercicios, describe cada campo vectorial dibujando algunos de sus vectores.
Para los siguientes ejercicios, encuentra el campo vectorial gradiente de cada función $f$.
Para los siguientes ejercicios, escribe fórmulas para los campos vectoriales con las propiedades dadas.
Para los siguientes ejercicios, supón que un campo eléctrico en el plano $xy$ causado por una línea infinita de carga a lo largo del eje $x$ es un campo gradiente con función potencial $V (x,y) = c\; ln\bigg(\frac{r_0}{\sqrt{x^2 + y^2}}\bigg)$, donde $c\gt 0$ es una constante y $r_0$ es una distancia de referencia en la que se supone que el potencial es cero.
Una línea de flujo (o línea de corriente) de un campo vectorial $\bold{F}$ es una curva $r (t)$ tal que $d\bold{r} / dt = \bold{F} (r (t))$. Si $\bold{F}$ representa el campo de velocidad de una partícula en movimiento, entonces las líneas de flujo son trayectorias tomadas por la partícula.
Por lo tanto, las líneas de flujo son tangentes al campo vectorial. Para los siguientes ejercicios, demuestra que la curva $\bold{c} (t)$ dada es una línea de flujo del campo vectorial de velocidad dado $\bold{F} (x, y, z)$.
Para los siguientes ejercicios, sea $\bold{F} = x\bold{i} + y\bold{j}, \bold{G} = -y\bold{i} + x\bold{j}$ y $\bold{H} = x\bold{i} - y\bold{j}$. Une $\bold{F}, \bold{G}$ y $\bold{H}$ con sus gráficas.
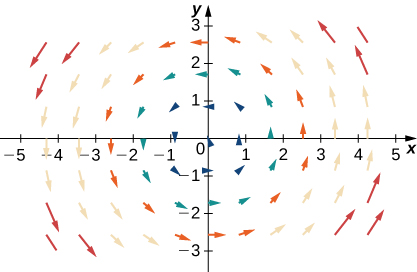
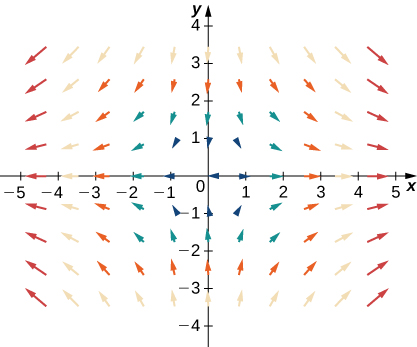

Para los siguientes ejercicios, sea $\bold{F} = x\bold{i} + y\bold{j}, \bold{G} = -y\bold{i} + x\bold{j}$ y $\bold{H} = -x\bold{i} + y\bold{j}$. Haz coincidir los campos vectoriales con sus gráficos en (I) - (IV).

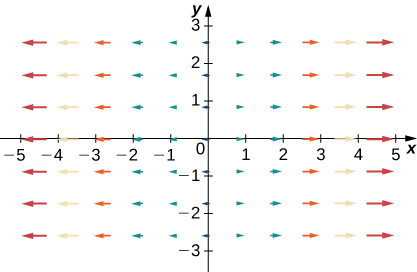
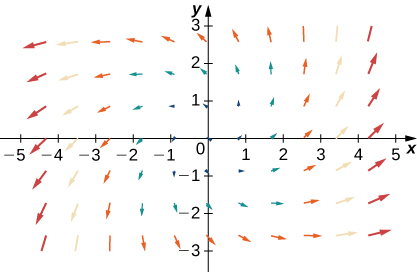

Antes de iniciar el siguiente apartado, te compartimos la unidad interactiva "Campos vectoriales" del Proyecto Prometeo. Esta unidad fue diseñada por Alejandro Radillo Díaz, como introducción a los campos vectoriales y a las herramientas usadas en su estudio, tales como el rotacional y la divergencia (que veremos más adelante). Se plantean dichas herramientas considerando elementos de volumen finitos (un disco que gira para el rotacional y una caja en la que entra o sale flujo para la divergencia). Con ello se pretende que el alumno tenga una noción física de cómo funcionan dichas herramientas y su asociación con la fórmula para rotacional y divergencia cuando dichos elementos de volumen se hacen infinitesimales. Finalmente se concluye con un resumen de lo aprendido y la relación formal con la definición de rotacional y divergencia en tres dimensiones, en los que profundizaremos en próximos apartados.
Estamos familiarizados con integrales de una sola variable de la forma $\displaystyle\int_a^bf (x) dx$, donde el dominio de integración es un intervalo $[a, b]$. Dicho intervalo se puede considerar como una curva en el plano $xy$, ya que el intervalo define un segmento de línea con puntos finales $(a, 0)$ y $(b, 0)$; en otras palabras, un segmento de línea ubicado en el eje $x$. Supón que queremos integrar sobre cualquier curva en el plano, no solo sobre un segmento de línea en el eje $x$. Tal tarea requiere un nuevo tipo de integral, llamada integral de línea.
Las integrales de línea tienen muchas aplicaciones en ingeniería y en física. También nos permiten hacer varias generalizaciones útiles del Teorema fundamental del cálculo. Y están estrechamente relacionadas con las propiedades de los campos vectoriales, como veremos.
Una integral de línea nos da la capacidad de integrar funciones multivariables y campos vectoriales sobre curvas arbitrarias en un plano o en el espacio. Hay dos tipos de integrales de línea: integrales de línea escalares e integrales de línea vectoriales. Las integrales de línea escalares son integrales de una función escalar sobre una curva en un plano o en el espacio.
Las integrales de línea vectoriales son integrales de un campo vectorial sobre una curva en un plano o en el espacio. Veamos primero las integrales de línea escalares.
Una integral de línea en un campo escalar, o integral de línea escalar, se define tal como se define una integral de variable única, excepto que para una integral de línea en un campo escalar, el integrando es una función de más de una variable y el dominio de integración es una curva en un plano o en el espacio, como opuesto a una curva en el eje $x$.
Para una integral de línea escalar, dejamos que $C$ sea una curva suave en un plano o en el espacio y sea $f$ una función con un dominio que incluya a $C$. Cortamos la curva en trozos pequeños. Para cada pieza, elegimos el punto $P$ en esa pieza y evaluamos $f$ en $P$ (podemos hacer esto porque todos los puntos en la curva están en el dominio de $f$). Multiplicamos $f (P)$ por la longitud del arco de la pieza $Δ s$, agregamos el producto $f (P) Δ s $ sobre todas las piezas y luego dejamos que la longitud del arco de las piezas se reduzca a cero tomando un límite. El resultado es la integral de línea escalar de la función sobre la curva.
Para una descripción formal de una integral de línea escalar, sea $C$ una curva suave en el espacio dada por la parametrización $\bold{r} (t) = ⟨x (t), y (t), z (t)⟩$, $a \le t \le b$. Sea $f (x, y, z)$ una función con un dominio que incluye la curva $C$. Para definir la integral de línea de la función $f$ sobre $C$, comenzamos como comienzan la mayoría de las definiciones de una integral: cortamos la curva en trozos pequeños. Dividimos el intervalo de parámetros $[a, b]$ en $n$ subintervalos $[t_{i - l}, t_i]$ de igual ancho para $l \le i \le n$, donde $t_0 = a$ y $t_n = b$ (). Dejamos que $t_i^*$ sea un valor en el i-ésimo intervalo $[t_{i - l}, t_i]$. Denotamos los puntos finales de $\bold{r} (t_0), \bold{r}(t_1),…, \bold{r} (t_n)$ por $P_0,…, P_n$. Los puntos $P_i$ dividen la curva $C$ en $n$ piezas $C_1, C_2,…, C_n$, con longitudes $Δ s_1, Δ s_2, … , Δ s_n$, respectivamente.
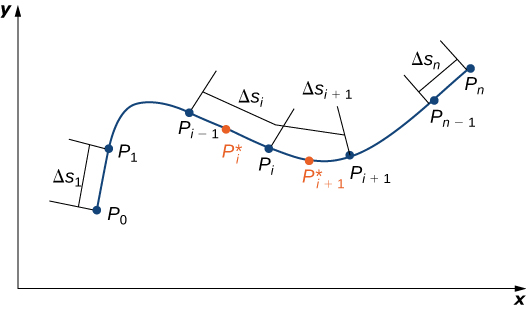
Es posible que hayas notado una diferencia entre esta definición de una integral de línea escalar y una integral de una sola variable. En esta definición, las longitudes de arco $Δ s_1, Δ s_2, … , Δ s_n$ no son necesariamente iguales; en la definición de integral de una sola variable, la curva en el eje $x$ se divide en partes de igual longitud. Esta diferencia no tiene ningún efecto en el límite. A medida que reducimos las longitudes de arco a cero, sus valores se acercan lo suficiente como para que cualquier pequeña diferencia se vuelva irrelevante.
Sea $f$ una función con un dominio que incluye la curva suave $C$ que está parametrizada por $bold{r}(t)= ⟨x(t),y(t),z(t)⟩, a\le t \le b$. La integral de línea escalar de $f$ a lo largo de $C$ es
$$\int_C f(x,y,z)dz = \lim\limits_{n \to \infin} \sum_{i=1}^n f\big(P_i^*\big)Δ s_i \tag{$6.5$}$$si este límite existe ($t_i^*$ y $Δ s_i$ se definen como en los párrafos anteriores). Si $C$ es una curva plana, entonces $C $se puede representar mediante las ecuaciones paramétricas $x = x (t), y = y (t)$ y $a \le t \le b$. Si $C$ es suave y $f (x,y)$ es una función de dos variables, entonces la integral de línea escalar de $f$ a lo largo de $C$ se define de manera similar como
$$\int_C f(x,y)ds = \lim\limits_{n \to \infin} \sum_{i=1}^n f\big(P_i^*\big)Δ s_i$$si este límite existe
Si $f$ es una función continua en una curva suave $C$, entonces $\int_Cf ds$ siempre existe. Dado que $\int_Cf ds$ se define como un límite de las sumas de Riemann, la continuidad de $f$ es suficiente para garantizar la existencia del límite, así como la integral $\int_a^bg (x) dx$ existe si $g$ es continua sobre $[a, b]$.
Antes de ver cómo calcular una integral de línea, debemos examinar la geometría capturada por estas integrales. Supón que $f (x,y) \ge 0$ para todos los puntos $(x,y)$ en una curva plana suave $C$. Imagina tomar la curva $C$ y proyectarla "hacia arriba" a la superficie definida por $f (x,y)$, creando así una nueva curva $C'$ que se encuentra en la gráfica de $f (x,y)$ (). Ahora dejamos caer una “hoja” desde $C'$ hasta el plano $xy$. El área de esta hoja es $\int_Cf (x,y) ds$ Si $f (x,y) \le 0$ para algunos puntos en $C$, entonces el valor de $\int_Cf (x,y) ds$ es el área por encima del plano $xy$ menos el área por debajo del plano $xy$ (observa la similitud con integrales de la forma $\int_a^bg (x) dx$).
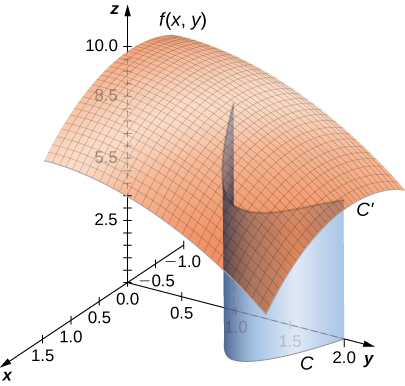
A partir de esta geometría, podemos ver que la integral de línea $\displaystyle\int_Cf (x,y) ds$ no depende de la parametrización $\bold{r} (t)$ de $C$. Siempre que la curva sea recorrida exactamente una vez por la parametrización, el área de la hoja formada por la función y la curva es la misma. Este mismo tipo de argumento geométrico se puede ampliar para mostrar que la integral de línea de una función de tres variables sobre una curva en el espacio no depende de la parametrización de la curva.
Hallando el valor de una integral de línea
Encuentra el valor de la integral $\displaystyle\int_C2ds$, donde $C $es la mitad superior del círculo unitario
Observa que en una integral de línea escalar, la integración se realiza con respecto a la longitud del arco $s$, lo que puede hacer que una integral de línea escalar sea difícil de calcular. Para facilitar los cálculos, podemos traducir $\displaystyle\int_Cf ds$ a una integral con una variable de integración que es $t$.
Sea $\bold{r} (t) = ⟨x (t), y (t), z (t)⟩$ para $a \le t \le b$ una parametrización de $C$. Dado que asumimos que $C$ es suave, $\bold{r'} (t) = ⟨x' (t), y' (t), z' (t)⟩$ es continua para todo $t$ en $[a, b]$. En particular, $x'(t), y' (t)$ y $z'(t)$ existen para todo $t$ en $[a, b]$. Según la fórmula de la longitud del arco, tenemos
Si el ancho $Δ t_i = t_i - t_{i - 1}$ es pequeño, entonces la función $\displaystyle\int_{t_{i-1}}^{t_i} ||\bold{r}'||dt \approx ||\bold{r}'t_i^*|| Δ t_i, ||\bold{r}'(t)||$ es casi constante en el intervalo $[t_{i - 1}, t_i]$. Por lo tanto,
$$\int_{t_{i-1}}^{t_i} ||\bold{r}'||dt \approx ||\bold{r}'\big(t_i^*\big)|| Δ t_i$$y tenemos
$$\sum_{i=1}^nf\big(\bold{r}\big(t_i^*\big)\big)Δ s_i = \sum_{i=1}^nf\big(\bold{r}\big(t_i^*\big)\big)||\bold{r}'\big(t_i^*\big)|| Δ t_i \tag{$6.6$}$$
Observa que
$$\lim\limits_{n \to \infin} \sum_{i=1}^nf\big(\bold{r}\big(t_i^*\big)\big)||\bold{r}'\big(t_i^*\big)|| Δ t_i = \int_a^b f(\bold{r}(t)) ||\bold{r}'||dt$$En otras palabras, a medida que los anchos de los intervalos $[t_{i -1}, t_i]$ se reducen a cero, la suma $\sum_{i=1}^nf\big(\bold{r}\big(t_i^*\big)\big)||\bold{r}'\big(t_i^*\big)|| Δ t_i$ converge a la integral $\int_a^bf (r (t)) || r' (t)|| dt$. Por lo tanto, tenemos el siguiente teorema.
Evaluación de una integral de línea escalar
Sea $f$ una función continua con un dominio que incluye la curva suave $C$ con parametrización $\bold{r} (t), a \le t \le b$. Luego
$$\int_C fds = \int_a^b f(\bold{r}(t)) ||\bold{r}'||dt \tag{$6.7$}$$Aunque hemos etiquetado la ecuación 6.6 como una ecuación, se considera con mayor precisión una aproximación porque podemos demostrar que el lado izquierdo de la ecuación 6.6 se aproxima al lado derecho cuando $n \to\infin$. En otras palabras, dejar que el ancho de las piezas se reduzca a cero hace que la suma de la derecha se acerque arbitrariamente a la suma de la izquierda. Ya que
$$||\bold{r}'|| = \sqrt{\big(x'\big)^2 + \big(y'\big)^2 + \big(z'\big)^2}$$obtenemos el siguiente teorema, que usamos para calcular integrales de línea escalares.
Cálculo de una integral de línea escalar
Sea $f$ una función continua con un dominio que incluye la curva suave $C$ con parametrización $\bold{r} (t) = ⟨x(t), y(t), z(t)⟩$. Luego
$$\int_C f(x,y,z)ds = \int_a^b f(\bold{r}(t)) \sqrt{\big(x'\big)^2 + \big(y'\big)^2 + \big(z'\big)^2}dt \tag{$6.8$}$$Similarmente,
$$\int_C f(x,y)ds = \int_a^b f(\bold{r}(t)) \sqrt{\big(x'\big)^2 + \big(y'\big)^2}dt$$si $C$ es una curva plana y $f$ es una función de dos variables.
Ten en cuenta que una consecuencia de este teorema es la ecuación $ds = ||\bold{r}'(t)|| dt$. En otras palabras, el cambio en la longitud del arco puede verse como un cambio en el dominio $t$, escalado por la magnitud del vector $\bold{r}'(t)$.
Evaluando una integral de línea
Encuentra el valor de la integral $\displaystyle\int_C (x^2 + y^2 + z)ds$, donde $C$ es parte de la hélice parametrizada por $\bold{r} (t) = ⟨cos t, sen t, t⟩, 0 \le t \le 2π$.
Independencia de la parametrización
Encuentra el valor de la integral $\displaystyle\int_C (x^2 + y^2 + z)ds$, donde $C$ es parte de la hélice parametrizada por $\bold{r} (t) = ⟨cos (2t), sen (2t), 2t⟩, 0 \le t \le π$. Observa que esta función y curva son las mismas que en el ejemplo anterior; la única diferencia es que la curva se ha vuelto a parametrizar para que el tiempo transcurra dos veces más rápido.
Ahora que podemos evaluar integrales de línea, podemos usarlas para calcular la longitud del arco. Si $f (x, y, z) = 1$, entonces
$$\begin{aligned} \int_C f(x,y,z)ds &= \lim\limits_{n \to \infin}\sum_{i=1}^n f\big(t_i^*\big)Δ s_i\\ &= \lim\limits_{n \to \infin}\sum_{i=1}^n Δ s_i\\ &= \lim\limits_{n \to \infin} \text{ longitud}(C)\\ &= \text{ longitud}(C) \end{aligned}$$Por lo tanto, $\displaystyle\int_C1d$s es la longitud de arco de $C$.
Calculando la longitud de arco
Un cable tiene una forma que se puede modelar con la parametrización $\bold{r} (t) = ⟨cos\; t, sen\; t, t⟩, 0 \le t \le 4π$. Calcula la longitud del cable.
En la siguiente escena interactiva, diseñada por Elena E. Álvarez Sáiz, se muestra la interpretación geométrica de la integral de línea de un campo escalar sobre una curva plana. El campo escalar a elegir puede venir dado por la tercera componente de una curva en el espacio que se proyecta sobre la curva plana o por el valor de una función de dos variables que es evaluable en los puntos de la curva plana.
El segundo tipo de integrales de línea son las integrales de línea vectoriales, o integrales de línea en un campo vectorial, en las que integramos a lo largo de una curva a través de un campo vectorial. Por ejemplo, sea
$$\bold{F} (x, y, z) = P (x, y, z)\bold{i} + Q (x, y, z)\bold{j} + R (x, y, z)\bold{k}$$un campo vectorial continuo en $Reals^3$ que representa una fuerza sobre una partícula, y sea $C$ una curva suave en $Reals^3$ contenida en el dominio de $\bold{F}$. ¿Cómo calcularíamos el trabajo realizado por $\bold{F}$ al mover una partícula a lo largo de $C$?
Para responder a esta pregunta, primero ten en cuenta que una partícula podría viajar en dos direcciones a lo largo de una curva: una dirección hacia adelante y una dirección hacia atrás. El trabajo realizado por el campo vectorial depende de la dirección en la que se mueve la partícula. Por lo tanto, debemos especificar una dirección a lo largo de la curva $C$; tal dirección especificada se llama orientación de una curva.
La dirección especificada es la dirección positiva a lo largo de $C$; la dirección opuesta es la dirección negativa a lo largo de $C$. Cuando a C se le ha dado una orientación, a $C$ se le llama curva orientada (). El trabajo realizado en la partícula depende de la dirección a lo largo de la curva en la que se mueve la partícula.
Una curva cerrada es aquella para la que existe una parametrización $\bold{r} (t), a \le t \le b$, tal que $\bold{r} (a) = \bold{r} (b)$, y la curva se recorre exactamente una vez. En otras palabras, la parametrización es uno a uno en el dominio $(a, b)$.

Sea $\bold{r} (t)$ una parametrización de $C$ para $a \le t \le b$ tal que la curva sea atravesada exactamente una vez por la partícula y la partícula se mueva en la dirección positiva a lo largo de $C$. Divide el intervalo de parámetros $[a, b]$ en $n$ subintervalos $[t_{i - 1}, t_i]$, $0 \le i \le n$, de igual ancho. Denota los puntos finales de $\bold{r} (t_0), \bold{r} (t_1), … , \bold{r} (t_n)$ por $P_0, …, P_n$. Los puntos $P_i$ dividen $C$ en $n$ piezas. Denota la longitud de la pieza de $P_{i - 1}$ a $P_i$ por $Δ s_i$. Para cada $i$, elige un valor $t_i^*$ en el subintervalo $[t_{i - 1}, t_i]$.
Entonces, el punto final de $\bold{r} (t_i^*)$ es un punto en la pieza de $C$ entre $P_{i - 1}$ y $P_i$ (). Si $Δ s_i$ es pequeño, entonces a medida que la partícula se mueve de $P_{i - 1}$ a $P_i$ a lo largo de $C$, se mueve aproximadamente en la dirección de $\bold{T}(P_i)$, el vector tangente unitario en el punto final de $\bold{r} (t_i^*)$. Sea $P_i^*$ el punto final de $\bold{r} (t_i^*)$. Entonces, el trabajo realizado por el campo del vector de fuerza al mover la partícula de $P_{i -1}$ a $P_i$ es $\bold{F}\big(P_i^*\big) ⋅ \big(Δ s_i\bold{T}(P_i^*)\big)$, por lo que el trabajo total realizado a lo largo de $C$ es
$$\sum_{i=1}^n\bold{F}\big(P_i^*\big) ⋅ \big(Δ s_i \bold{T}\big(P_i^*\big)\big) = \sum_i^n \bold{F}\big(P_i^*\big) ⋅ \bold{T}\big(P_i^*\big)Δ s_i$$
Al dejar que la longitud del arco de las piezas de $C$ se vuelva arbitrariamente pequeña tomando un límite como $n \to \infin$ nos da el trabajo realizado por el campo al mover la partícula a lo largo de $C$. Por lo tanto, el trabajo realizado por $\bold{F}$ al mover la partícula en la dirección positiva a lo largo de $C$ se define como
$$W = \int_C \bold{F} ⋅ \bold{T}ds$$lo que nos da el concepto de integral de línea vectorial o, si se prefiere, integral de línea en un campo vectorial.
La integral de línea vectorial del campo vectorial $\bold{F}$ a lo largo de la curva suave orientada $C$ es
$$\int_C \bold{F} ⋅ \bold{T} ds = \lim\limits_{n \to \infin}\sum_i^n \bold{F}\big(P_i^*\big) ⋅ \bold{T}\big(P_i^*\big)Δ s_i$$si ese límite existe
Con las integrales de línea escalar, ni la orientación ni la parametrización de la curva importan. Siempre que la curva sea atravesada exactamente una vez por la parametrización, el valor de la integral de línea no se modifica. Con integrales de línea vectorial, la orientación de la curva sí importa. Si pensamos en la integral de línea como trabajo de computación, entonces esto tiene sentido: si subes una montaña, entonces la fuerza gravitacional de la Tierra hace un trabajo negativo sobre ti. Si caminas por la montaña exactamente por el mismo camino, entonces la fuerza gravitacional de la Tierra hace un trabajo positivo en ti. En otras palabras, invertir la ruta cambia el valor del trabajo de negativo a positivo en este caso. Ten en cuenta que si $C$ es una curva orientada, entonces dejamos que $-C $represente la misma curva pero con orientación opuesta.
Al igual que con las integrales de línea escalares, es más fácil calcular una integral de línea vectorial si la expresamos en términos de la función de parametrización $\bold{r}$ y la variable $t$. Para traducir la integral $\int_C\bold{F} ⋅ \bold{T}ds$ en términos de $t$, observa que el vector unitario tangente $\bold{T}$ a lo largo de $C$ está dado por $\bold{T} = \frac{\bold{r}'(t)}{||\bold{r}'(t) ||}$ (asumiendo $||\bold{r}'(t) || ≠ 0$).
Dado que $ds = ||\bold{r}'(t) || dt$, como vimos al discutir las integrales de línea escalar, tenemos
$$\bold{F} ⋅ \bold{T}ds = \bold{F}\big(\bold{r}(t)\big) ⋅ \frac{\bold{r}'(t)}{||\bold{r}'(t) ||}||\bold{r}'(t) ||dt = \bold{F}\big(\bold{r}(t)\big) ⋅ \bold{r}'(t)$$Por lo tanto, tenemos la siguiente fórmula para calcular integrales de líneas vectoriales:
$$\int_C\bold{F} ⋅ \bold{T}ds = \int_a^b \bold{F}\big(\bold{r}(t)\big) ⋅ \bold{r}'(t)dt \tag{$6.9$}$$Debido a la ecuación 6.9, a menudo usamos la notación $\displaystyle\int_\bold{F} ⋅ d\bold{r}$ para la integral de línea $\displaystyle\int_C\bold{F} ⋅ \bold{T}ds$. Si $\bold{r} (t) = ⟨x (t), y (t), z (t)⟩$, entonces $d\bold{r}$ denota el vector $⟨x'(t), y' (t), z' (t)⟩$.
Evaluando una integral de línea vectorial
Encuentra el valor de la integral $\displaystyle\int_C\bold{F} ⋅ d\bold{r}$, donde $C$ es el semicírculo parametrizado por $\bold{r} (t) = ⟨cos\; t, sen \;t⟩, 0 \le t \le π$ y $\bold{F} = ⟨-y, x⟩$.
Orientación inversa
Encuentra el valor de la integral $\displaystyle\int_C\bold{F} ⋅ d\bold{r}$, donde $C$ es el semicírculo parametrizado por $\bold{r} (t) = ⟨cos\; t + π, sen\; t⟩, 0 \le t \le π$ y $\bold{F} = ⟨-y, x⟩$
Sea $C$ una curva orientada y $-C$ la misma curva pero con la orientación invertida. Luego, los dos ejercicios anteriores ilustran el siguiente hecho:
$$\int_C\bold{F} ⋅ d\bold{r} = -\int_{-C}\bold{F} ⋅ d\bold{r}$$Es decir, invertir la orientación de una curva cambia el signo de una integral de línea.
Otra notación estándar para la integral $\int_C\bold{F} ⋅ d\bold{r}$ es $\int_C Pdx + Qdy + Rdz$. En esta notación, $P, Q$ y $R$ son funciones, y pensamos en $d\bold{r}$ como el vector $⟨dx, dy, dz⟩$. Para justificar esta convención, recuerda que $d\bold{r} = \bold{T}ds = \bold{r}'(t) dt = ⟨\frac{dx}{dt}, \frac{dy}{dt}, \frac{dz}{dt}⟩ dt$. Por lo tanto,
$$\int_C\bold{F} ⋅ d\bold{r} = ⟨P, Q, R ⟩ ⋅ ⟨dx, dy, dz ⟩ = Pdx + Qdy + Rdz$$Si $d\bold{r}⟨dx, dy, dz ⟩$, entonces $\frac{d\bold{r}}{dt} = ⟨\frac{dx}{dt}, \frac{dy}{dt}, \frac{dz}{dt}⟩ dt$. Por lo tanto
Hallando el valor de una integral de la forma $\displaystyle\int_C Pdx + Qdy + Rdz$
Encuentra el valor de la integral $\displaystyle\int_C zdx + xdy + ydz$, donde $C$ es la curva parametrizada por $\bold{r} (t) = ⟨t^2, \sqrt{t}, t⟩, 1 \le t \le 4$.
Hemos aprendido a integrar curvas de orientación suave. Ahora, supón que $C$ es una curva orientada que no es suave, pero que puede escribirse como la unión de un número finito de curvas suaves. En este caso, decimos que $C$ es una curva suave a trozos. Para ser precisos, la curva $C$ es suave por partes si $C $se puede escribir como una unión de $n$ curvas suaves $C_1, C_2, …, C_n$ de manera que el punto final de $C_i$ es el punto de partida de $C_{i + 1}$ (). Cuando las curvas $C_i$ satisfacen la condición de que el punto final de $C_i$ es el punto inicial de $C_{i + 1}$, escribimos su unión como $C_1 + C_2 + ⋅ s + C_n.$
El siguiente teorema resume varias propiedades clave de las integrales de líneas vectoriales.
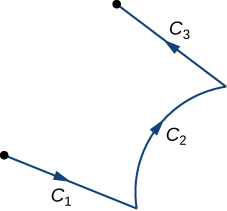
Propiedades de las integrales de línea vectoriales
Sean $\bold{F}$ y $\bold{G}$ campos vectoriales continuos con dominios que incluyen la curva suave orientada $C$. Entonces
Observa las similitudes entre estos elementos y las propiedades de las integrales de una sola variable. Las propiedades i. y ii. dicen que las integrales de línea son lineales, lo cual también es cierto para las integrales de una sola variable. La propiedad iii. dice que invertir la orientación de una curva cambia el signo de la integral. Si pensamos en la integral como el cálculo del trabajo realizado en una partícula que viaja a lo largo de $C$, entonces esto tiene sentido. Si la partícula se mueve hacia atrás en lugar de hacia adelante, entonces el valor del trabajo realizado tiene el signo opuesto. Esto es análogo a la ecuación $\int_a^b f(x)dx = -\int_b^a f(x)dx$. Finalmente, si $[a_1, a_2], [a_2, a_3],…, [a_{n - 1}, a_n]$ son intervalos, entonces
$$\int_{a_1}^{a_n} f(x)dx = \int_{a_1}^{a_2} f(x)dx + \int_{a_2}^{a_3} f(x)dx + ⋅ s + \int_{a_{n-1}}^{a_n} f(x)dx$$que es análogo a la propiedad iv.
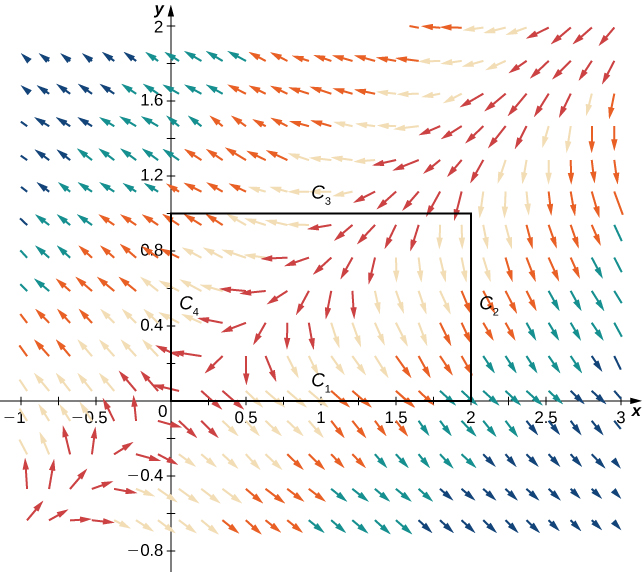
Para terminar este apartado, presentamos la siguiente escena interactiva, diseñada por Elena E. Álvarez Sáiz, en la cual se muestra cómo la integral de línea de un campo vectorial a lo largo de una curva, es la integral de línea de la componente tangencial del campo a la curva. Si $\bold{F}$ es un campo de fuerzas en el espacio, entonces una partícula que se mueva a lo largo de una curva mientras actúa sobre ella $\bold{F}$, realizará un trabajo $W$. Para calcular este trabajo se hace una partición de la curva $C$ y se calcula el trabajo parcial realizado por $\bold{F}$ para mover una partícula sobre un subarco cualquiera de la partición. El trabajo total será la suma de los trabajos sobre todos los subarcos considerados en $C$.
Las integrales de línea escalar tienen muchas aplicaciones. Se pueden usar para calcular la longitud o masa de un cable, el área de superficie de una hoja de una altura determinada o el potencial eléctrico de un cable cargado dada una densidad de carga lineal. Las integrales de línea vectoriales son extremadamente útiles en física. Se pueden usar para calcular el trabajo realizado en una partícula a medida que se mueve a través de un campo de fuerza, o el caudal de un fluido a través de una curva. Aquí, calculamos la masa de un cable usando una integral de línea escalar y el trabajo realizado por una fuerza usando una integral de línea vectorial.
Supón que un trozo de alambre está modelado por la curva $C$ en el espacio. La masa por unidad de longitud (la densidad lineal) del cable es una función continua $ρ (x, y, z)$. Podemos calcular la masa total del cable usando la integral de línea escalar $\int_Cρ (x, y, z) ds$.
La razón es que la masa es la densidad multiplicada por la longitud y, por lo tanto, la densidad de una pequeña pieza del cable se puede aproximar por $ρ x^*, y^*, z^* Δ s$ para algún punto $(x^*, y^*, z^*)$ en la pieza. Al dejar que la longitud de las piezas se reduzca a cero con un límite, se obtiene la integral de línea $\int_Cρ (x, y, z) ds$.
Calculando la masa de un cable
Calcular la masa de un cable en forma de curva parametrizada por $⟨t, 2 cos t, 2 sin t⟩, 0 \le t \le \frac{π}{2}$, con una función de densidad dada por $ρ (x, y, z) = e^x + yz\; kg / m$ ()

Cuando definimos por primera vez las integrales de línea vectorial, usamos el concepto de trabajo para motivar la definición. Por lo tanto, no es sorprendente que el cálculo del trabajo realizado por un campo vectorial que representa una fuerza sea un uso estándar de integrales de líneas vectoriales. Recuerda que si un objeto se mueve a lo largo de la curva $C$ en el campo de fuerza $\bold{F}$, entonces el trabajo requerido para mover el objeto está dado por $\int_C\bold{F} ⋅ d\bold{r}$.
Calculando el trabajo
¿Cuánto trabajo se requiere para mover un objeto en el campo de fuerza vectorial $\bold{F} = ⟨yz, xy, xz⟩$ a lo largo de la trayectoria $\bold{r} (t) = ⟨t^2, t, t^4⟩ , 0 \le t \le 1$?
Cerramos esta sección discutiendo dos conceptos clave relacionados con las integrales de línea: flujo a través de una curva plana y circulación a lo largo de una curva plana. El flujo se utiliza en aplicaciones para calcular el flujo de un fluido a través de una curva, y el concepto de circulación es importante para caracterizar campos de gradientes conservativos en términos de integrales de línea. Ambos conceptos se utilizan mucho en el resto de este capítulo. La idea de flujo es especialmente importante para el teorema de Green, y en dimensiones superiores para el teorema de Stokes y el teorema de divergencia.
Sea $C$ una curva plana y sea $\bold{F}$ un campo vectorial en el plano. Imagina que $C$ es una membrana a través de la cual fluye el fluido, pero $C$ no impide el flujo del fluido. En otras palabras, $C$ es una membrana idealizada invisible para el fluido. Supón que $\bold{F}$ representa el campo de velocidad del fluido. ¿Cómo podríamos cuantificar la velocidad a la que el fluido atraviesa $C$?
Recuerda que la integral de línea de $\bold{F}$ a lo largo de $C$ es $\int_C\bold{F} ⋅ \bold{T} ds$; en otras palabras, la integral de línea es el producto escalar del campo vectorial con el vector tangencial unitario con respecto a la longitud del arco. Si reemplazamos el vector tangencial unitario con el vector normal unitario $\bold{N} (t)$ y en su lugar calculamos la integral $\int_C\bold{F} ⋅ \bold{N} ds$ y determinamos el flujo a través de $C$. Para ser precisos, la definición de la integral $\int_C\bold{F} ⋅ \bold{N} ds$; es la misma que la integral $\int_C\bold{F} ⋅ \bold{T} ds$;, excepto que la $\bold{T}$ en la suma de Riemann se reemplaza con $\bold{N}$. Por lo tanto, el flujo a través de C se define como
$$\int_C\bold{F} ⋅ \bold{N} ds = \lim\limits_{n \to \infin}\sum_{i=1}^n \bold{F}\big(P_i^*\big) ⋅ \bold{N}\big(P_i^*\big)Δ s_i$$donde $\big(P_i^*\big)$ y $Δ s_i$ se definen como lo fueron para la integral $\int_C\bold{F} ⋅ \bold{T} ds$. Por lo tanto, una integral de flujo es una integral que es perpendicular a una integral de línea vectorial, porque $\bold{N}$ y $\bold{T}$ son vectores perpendiculares.
Si $\bold{F}$ es un campo de velocidad de un fluido y $C$ es una curva que representa una membrana, entonces el flujo de $\bold{F}$ a través de $C$ es la cantidad de fluido que fluye a través de $C$ por unidad de tiempo, o la tasa de flujo.
Más formalmente, sea $C$ una curva plana parametrizada por $\bold{r} (t) = ⟨x (t), y (t)⟩, a \le t \le b$. Sea $\bold{n} (t) = ⟨y'(t), -x' (t)⟩$ el vector que es normal a $C$ en el punto final de $\bold{r} (t)$ y apunta a la derecha a medida que recorremos $C$ en la dirección positiva (). Entonces, $\bold{N} (t) = \frac{\bold{n} (t)}{|| \bold{n} (t)||}$ es el vector normal unitario a $C$ en el punto final de $\bold{r} (t)$ que apunta a la derecha cuando atravesamos $C$.
El flujo de $\bold{F}$ a través de $C$ es integral de línea $\displaystyle\int_C \bold{F} ⋅ \frac{\bold{n} (t)}{|| \bold{n} (t)||} ds$
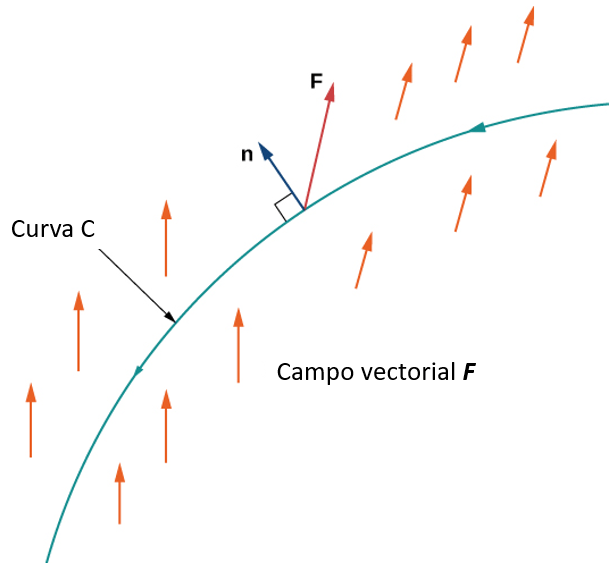
Ahora damos una fórmula para calcular el flujo a través de una curva. Esta fórmula es análoga a la fórmula utilizada para calcular una integral de línea vectorial (ver Ecuación 6.9).
Calculando el flujo a lo largo de una curva
Sea $\bold{F}$ un campo vectorial y sea $C$ una curva suave con parametrización $\bold{r} (t) = ⟨x (t), y (t)⟩ , a \le t \le b$. Sea $\bold{n} (t) = ⟨y'(t), -x'(t)⟩$. El flujo de $\bold{F}$ a través de $C$ es
$$\int_C \bold{F} ⋅ \bold{N}ds = \int_a^b \bold{F}(\bold{r}(t)) ⋅ \bold{n}(t)dt \tag{$6.11$}$$La demostración de la ecuación 6.11 es similar a la demostración de la ecuación 6.8. Antes de deducir la fórmula, ten en cuenta que $|| \bold{n} (t) || = || ⟨y' (t), -x'(t)⟩ || = \sqrt{y'(t)^2 + x'(t)^2} = ||\bold{r}'(t )||$. Por lo tanto,
$$\begin{aligned} \int_C \bold{F} ⋅ \bold{N} ds &= \int_C \bold{F} ⋅ \frac{\bold{n}(t)}{||\bold{n}(t)||}ds\\ &= \int_a^b \bold{F} ⋅ \frac{\bold{n}(t)}{||\bold{n}(t)||} ||\bold{r}'(t)||dt\\ &= \int_a^b \bold{F}(\bold{r}(t)) ⋅ \bold{n}(t)dt\end{aligned}$$
Flujo a través de una curva
Calcula el flujo de $\bold{F} = ⟨2x, 2y⟩$ a través de un círculo unitario orientado en sentido contrario a las agujas del reloj ()
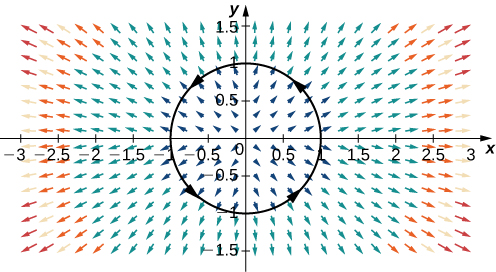
Sea $\bold{F} (x,y) = ⟨P (x,y), Q (x,y)⟩$ un campo vectorial bidimensional. Recuerda que la integral $\int_C\bold{F} ⋅ \bold{T}ds$ a veces se escribe como $\int_CPdx + Qdy$. De manera análoga, el flujo $\int_C\bold{F} ⋅ \bold{N}ds$ a veces se escribe en la notación $\int_C - Qdx + Pdy$, porque el vector normal unitario $\bold{N}$ es perpendicular a la tangente unitaria $\bold{T}$. Al girar el vector $d\bold{r} = ⟨dx, dy⟩$ $90°$ se obtiene el vector $⟨dy, -dx⟩$.
Ahora que hemos definido el flujo, podemos centrar nuestra atención en la circulación. La integral de línea del campo vectorial $\bold{F}$ a lo largo de una curva cerrada orientada se llama circulación de $\bold{F}$ a lo largo de $C$. Las integrales de línea de circulación tienen su propia notación: $\oint_C\bold{F} ⋅ \bold{T}ds$. El círculo en el símbolo integral denota que $C$ es "circular" porque no tiene puntos finales.
Para ver de dónde proviene el término circulación y qué mide, sea $\bold{v}$ el campo de velocidad de un fluido y sea $C$ una curva cerrada orientada. En un punto particular $P$, cuanto más cerca está la dirección de $\bold{v} (P)$ a la dirección de $\bold{T}(P)$, mayor es el valor del producto escalar $\bold{v} (P) ⋅ \bold{T} (P)$. El valor máximo de $\bold{v} (P) ⋅ \bold{T} (P)$ ocurre cuando los dos vectores apuntan exactamente en la misma dirección; el valor mínimo de $\bold{v} (P) ⋅ \bold{T} (P)$ ocurre cuando los dos vectores apuntan en direcciones opuestas.
Así, el valor de la circulación $\oint_C\bold{v} ⋅ \bold{T}ds$ mide la tendencia del fluido a moverse en la dirección de $C$
Calculando la circulación
Sea $\bold{F} = ⟨- y, x⟩$ el campo vectorial y sea $C$ el círculo unitario orientado en sentido anti-horario. Calcula la circulación de $\bold{F}$ a lo largo de $C$.
En el ejercicio anterior, ¿qué pasaría si hubiéramos orientado el círculo unitario en el sentido de las agujas del reloj? Denotamos el
círculo unitario orientado en sentido horario por $-C$. Luego
$$\oint_{-C} \bold{F} ⋅ \bold{T} ds = -\oint \bold{F} ⋅ \bold{T} ds = -2π$$Observa que la circulación es negativa en este caso. La razón de esto es que la orientación de la curva fluye contra la dirección de $\bold{F}$.
Calculando el trabajo
Calcula el trabajo realizado en una partícula que atraviesa el círculo $C$ de radio $2$ centrado en el origen, orientado en sentido antihorario, por el campo $\bold{F} (x,y) = ⟨-2, y⟩$. Supón que la partícula comienza su movimiento en $(1, 0)$.
Para los siguientes ejercicios, usa un sistema de álgebra computarizado (CAS) para evaluar las integrales de línea sobre la ruta indicada
Para los siguientes ejercicios, encuentra el trabajo realizado.
Para los siguientes ejercicios, evalúa las integrales de línea.
En los siguientes ejercicios, encuentra el trabajo realizado por el campo de fuerza $\bold{F}$ sobre un objeto que se mueve a lo largo de la trayectoria indicada.

Para los siguientes ejercicios, usa un CAS para evaluar las integrales de línea dadas.
Para los siguientes ejercicios, encuentre el flujo.
David elige la ruta que corre a lo largo del eje $x$ desde $(0,0)$ hasta $(1, 0)$ y luego corre a lo largo de la línea vertical $x = 1$ desde $(1, 0)$ hasta el punto final $(1, 1)$. Sandra elige el camino directo a lo largo de la línea diagonal $y = x$ desde $(0, 0)$ hasta $(1, 1)$. ¿De quién es la integral de línea más grande y en cuánto?
En este apartado, continuaremos el estudio de campos vectoriales conservativos. Examinaremos el Teorema fundamental para integrales de línea, que es una generalización útil del Teorema fundamental del cálculo para integrales de línea de campos vectoriales conservativos. También descubriremos cómo probar si un campo vectorial dado es conservativo y determinar cómo construir una función potencial para un campo vectorial que se sabe que es conservativo.
Antes de continuar nuestro estudio de campos vectoriales conservativos, necesitamos algunas definiciones geométricas. Todos los teoremas de las secciones siguientes se basan en la integración sobre ciertos tipos de curvas y regiones, por lo que aquí desarrollaremos las definiciones de esas curvas y regiones.
Primero definiremos dos tipos especiales de curvas: curvas cerradas y curvas simples. Como hemos aprendido, una curva cerrada es aquella que comienza y termina en el mismo punto. Una curva simple es aquella que no se cruza. Una curva que es a la vez cerrada y simple es una curva cerrada simple ().
La curva $C$ es una curva cerrada si hay una parametrización $\bold{r} (t), a \le t \le b$ de $C$ tal que la parametrización atraviesa la curva exactamente una vez y $\bold{r}(a) = \bold{r}(b)$. La curva $C$ es una curva simple si $C$ no se cruza. Es decir, $C$ es simple si existe una parametrización $\bold{r} (t), a \le t \le b$ de $C$ tal que $\bold{r}$ es uno a uno sobre $(a, b)$. Es posible que $\bold{r}(a) = \bold{r} (b)$, lo que significa que la curva simple también está cerrada.

Determinar si una curva es simple y cerrada
¿Es la curva con parametrización $\bold{r} (t) = \big⟨cos\; t, \frac{sen\; (2t)}{2}\big⟩, 0 \le t \le 2π$ ¿una curva cerrada simple?
Muchos de los teoremas de este capítulo relacionan una integral sobre una región con una integral sobre el límite de la región, donde el límite de la región es una curva cerrada simple o una unión de curvas cerradas simples. Para desarrollar estos teoremas, necesitamos dos definiciones geométricas para regiones: la de una región conectada y la de una región simplemente conectada. Una región conectada es aquella en la que hay una ruta en la región que conecta dos puntos cualesquiera que se encuentren dentro de esa región. Una región simplemente conectada es una región conectada que no tiene ningún agujero.
Estas dos nociones, junto con la noción de una curva cerrada simple, nos permiten formular varias generalizaciones del Teorema fundamental del cálculo más adelante en este capítulo. Estas dos definiciones son válidas para regiones en cualquier número de dimensiones, pero solo nos interesan las regiones en dos o tres dimensiones.
Una región $D$ es una región conectada si, para dos puntos cualesquiera $P_1$ y $P_2$, hay una ruta de $P_1$ a $P_2$ con una traza contenida completamente dentro de $D$. Una región $D$ es una región simplemente conectada si $D$ está conectada para cualquier curva cerrada simple $C$ que se encuentra dentro de $D$, y la curva $C$ se puede reducir continuamente a un punto mientras permanece completamente dentro de $D$. En dos dimensiones, una región simplemente está conectada si está conectada y no tiene agujeros.
Todas las regiones simplemente conectadas están conectadas, pero no todas las regiones conectadas están simplemente conectadas ().
Ahora que entendemos algunas curvas y regiones básicas, generalicemos el Teorema fundamental del cálculo a integrales de línea.

Recuerda que el Teorema fundamental del cálculo dice que si una función $f$ tiene una antiderivada $F$, entonces la integral de $f$ desde $a$ a $b$ depende solo de los valores de $F$ en $a$ y en $b$, es decir,
Si pensamos en el gradiente como una derivada, entonces el mismo teorema se aplica a las integrales de líneas vectoriales. Mostramos cómo funciona esto usando un ejercicio motivacional.
Evaluación de una integral de línea y las antiderivadas de los puntos finales
Sea $\bold{F} (x,y) = ⟨2x, 4y⟩$. Calcula $\int_C\bold{F} ⋅ d\bold{r}$, donde $C$ es el segmento de línea desde $(0,0)$ hasta $(2,2)$.
El siguiente teorema dice que, bajo ciertas condiciones, lo que sucedió en el ejercicio anterior es válido para cualquier campo gradiente. El mismo teorema es válido para integrales de línea vectoriales, que llamamos Teorema fundamental para integrales de línea.
El Teorema Fundamental para Integrales de Línea
Sea $C$ una curva suave a trozos con parametrización $\bold{r} (t), a \le t \le b$. Sea $f$ una función de dos o tres variables con derivadas parciales de primer orden que existen y son continuas en $C$ Entonces
De la ecuación 6.9
$$\int_C ∇ f ⋅ d\bold{r} = \int_a^b ∇ f(\bold{r}(t)) ⋅ \bold{r}'(t)dt$$Por la regla de la cadena
$$\frac{d}{dt}f(\bold{r}(t)) = ∇ f(\bold{r}(t)) ⋅ \bold{r}'(t)$$Por lo tanto, según el Teorema Fundamental del Cálculo,
$$\begin{aligned} \int_C ∇ f ⋅ d\bold{r} &= \int_a^b ∇ f(\bold{r}(t)) ⋅ \bold{r}'(t)dt\\ &= \int_a^b \frac{d}{dt} (f(\bold{r}(t))dt\\ &= \bigg[f(\bold{r}(t))\bigg]_{t=a}^{t=b}\\ &= f(\bold{r}(b)) - f(\bold{r}(a)) \end{aligned}$$Sabemos que si $\bold{F}$ es un campo vectorial conservativo, existen funciones potenciales $f$ tales que $∇ f = \bold{F}$. Por lo tanto, $\int_C\bold{F} ⋅ d\bold{r} = \int_C∇ f · d\bold{r} = f(\bold{r} (b) - f(\bold{r} (a))$.
En otras palabras, al igual que con el Teorema Fundamental del Cálculo, calcular la integral de línea $\int_C\bold{F} ⋅ d\bold{r}$, donde $\bold{F}$ es conservativa, es un proceso de dos pasos: (1) encontrar una función potencial ("antiderivada") $f$ para $\bold{F}$ y (2) calcular el valor de $f$ en los puntos extremos de $C$ y calcular su diferencia $f(\bold{r} (b)) - f(\bold{r} (a))$. Sin embargo, ten en cuenta que hay una diferencia importante entre el Teorema Fundamental del Cálculo y el Teorema Fundamental para Integrales de Línea. Una función de una variable que es continua debe tener una antiderivada. Sin embargo, un campo vectorial, incluso si es continuo, no necesita tener una función potencial.
Aplicando el Teorema Fundamental
Calcular la integral $\int_C\bold{F} ⋅ d\bold{r}$, donde $\bold{F} (x, y, z) = \big⟨2x ln\;y, \frac{x^2}{y} + z^2, 2yz\big⟨$ y $C$ es una curva con parametrización $\bold{r} (t) = ⟨t^2, t, t⟩, 1 \le t \le e$
El ejercicio anterior ilustra una característica interesante del Teorema Fundamental de Integrales de Línea: nos permite calcular más fácilmente muchas integrales de línea vectoriales. Mientras tengamos una función potencial, calcular la integral de línea es solo una cuestión de evaluar la función potencial en los puntos finales y restar.
El Teorema Fundamental de las Integrales de Línea tiene dos consecuencias importantes. La primera consecuencia es que si $\bold{F}$ es conservativa y $C$ es una curva cerrada, entonces la circulación de $\bold{F}$ a lo largo de $C$ es cero, es decir, $\int_C\bold{F} ⋅ d\bold{r} = 0$. Para ver por qué esto es cierto, sea $f$ una función potencial para $\bold{F}$. Dado que $C$ es una curva cerrada, el punto terminal $\bold{r} (b)$ de $C$ es el mismo que el punto inicial $\bold{r} (a)$ de $C$, es decir, $\bold{r} (a) = \bold{r} (b)$. Por lo tanto, según el Teorema Fundamental para Integrales de Línea,
$$\begin{aligned} \oint_C \bold{F} ⋅ d\bold{r} &= \oint_C ∇ f ⋅ d\bold{r}\\ &= f(\bold{r}(b)) -f(\bold{r}(a))\\ &= f(\bold{r}(b)) -f(\bold{r}(b))\\ &= 0 \end{aligned}$$Recuerda que la razón por la que un campo vectorial conservativo $\bold{F}$ se llama "conservativo" es porque tales campos vectoriales modelan fuerzas en las que se conserva energía. Hemos demostrado que la gravedad es un ejemplo de tal fuerza. Si pensamos en el campo vectorial $\bold{F}$ en la integral $\oint_C\bold{F} ⋅ d\bold{r}$ como un campo gravitacional, entonces se sigue que la ecuación $\displaystyle\oint_C\bold{F} ⋅ d\bold{r} = 0$. Si una partícula viaja a lo largo de un camino que comienza y termina en el mismo lugar, entonces el trabajo realizado por la gravedad sobre la partícula es cero.
La segunda consecuencia importante del Teorema Fundamental para Integrales de Línea es que las integrales de línea de los campos vectoriales conservativos son independientes de la ruta, es decir, dependen sólo de los puntos finales de la curva dada y no dependen de la ruta entre los puntos finales.
Sea $\bold{F}$ un campo vectorial con dominio $D$. El campo vectorial $\bold{F}$ es independiente de la ruta si $\displaystyle\int_{C_1}\bold{F} ⋅ d\bold{r} = \int_{C_2}\bold{F} ⋅ d\bold{r}$ para cualquier ruta $C_1$ y $C_2$ en $D$ con los mismos puntos iniciales y terminales.
La segunda consecuencia se establece formalmente en el siguiente teorema.
Independencia de la ruta de los campos conservativos
Si $\bold{F}$ es un campo vectorial conservativo, $\bold{F}$ es independiente de la trayectoria.
Sea $D$ el dominio de $\bold{F}$ y sean $C_1$ y $C_2$ dos caminos en $D$ con los mismos puntos inicial y terminal (). Llama al punto inicial $P_1$ y al punto terminal $P_2$. Dado que $\bold{F}$ es conservativa, existe una función potencial $f$ para $\bold{F}$. Según el Teorema Fundamental para Integrales de Línea,
$$\int_{C_1} \bold{F} ⋅ d\bold{r} = f(P_2) - f(P_1) = \int_{C_2} \bold{F} ⋅ d\bold{r}$$Por lo tanto, $\displaystyle\int_{C_1} \bold{F} ⋅ d\bold{r} = \int_{C_2} \bold{F} ⋅ d\bold{r}$ y $\bold{F}$ es independiente del camino.

Para visualizar lo que significa la independencia del camino, imagina a tres excursionistas subiendo desde el campamento base hasta la cima de una montaña. El excursionista 1 toma una ruta empinada directamente desde el campamento hasta la cima. El excursionista 2 toma una ruta sinuosa que no es empinada desde el campamento hasta la cima. El excursionista 3 comienza tomando la ruta empinada, pero a mitad de camino hacia la cima decide que es demasiado difícil para él. Por tanto, vuelve al campamento y toma el camino no empinado hasta la cima. Los tres excursionistas viajan por caminos en un campo gravitacional. Dado que la gravedad es una fuerza en la que se conserva la energía, el campo gravitacional es conservativo. Por independencia de camino, la cantidad total de trabajo realizado por gravedad sobre cada uno de los excursionistas es el mismo porque todos comenzaron en el mismo lugar y terminaron en el mismo lugar.
El trabajo realizado por los excursionistas incluye otros factores como la fricción y el movimiento muscular, por lo que la cantidad total de energía gastada por cada uno no es la misma, pero la energía neta gastada contra la gravedad es la misma para los tres excursionistas.
Hemos demostrado que si $\bold{F}$ es conservativa, entonces $\bold{F}$ es independiente de la trayectoria. Resulta que si el dominio de $\bold{F}$ está abierto y conectado, entonces lo contrario también es cierto. Es decir, si $\bold{F}$ es independiente de la trayectoria y el dominio de $\bold{F}$ está abierto y conectado, entonces $\bold{F}$ es conservativa. Por lo tanto, el conjunto de campos vectoriales conservativos en dominios abiertos y conectados es precisamente el conjunto de campos vectoriales independientes de la ruta.
La prueba de independencia de la trayectoria para campos conservativos
Si $\bold{F}$ es un campo vectorial continuo que es independiente de la ruta y el dominio $D$ de $\bold{F}$ está abierto y conectado, entonces $\bold{F}$ es conservativo.
Demostramos el teorema para campos vectoriales en $ℝ^2$. La prueba de campos vectoriales en $ℝ^3$ es similar. Para demostrar que $\bold{F} = ⟨P, Q⟩$ es conservativo, debemos encontrar una función potencial $f$ para $\bold{F}$. Para ese fin, sea $X$ un punto fijo en $D$.
Para cualquier punto (x,y) en $D$, sea $C$ un camino de $X$ a $(x,y)$. Definamos $f (x,y)$ por $f (x,y) = \int_C\bold{F} ⋅ d\bold{r}$ (ten en cuenta que esta definición de $f$ tiene sentido solo porque $\bold{F}$ es independiente de la ruta. Si $F$ no fuera independiente de la ruta, entonces podría ser posible encontrar otra ruta $C'$ de $X$ a $(x,y)$ tal que $\int_C\bold{F} ⋅ d\bold{r} ≠ \int_C\bold{F} ⋅ d\bold{r}$, y en tal caso $f (x,y)$ no sería una función) Queremos demostrar que $f$ tiene la propiedad $∇ f = \bold{F}$.
Dado que el dominio $D$ está abierto, es posible encontrar un disco centrado en $(x,y)$ tal que el disco esté contenido por completo dentro de $D$. Sea $(a, y)$ con $a \lt x$ un punto en ese disco. Sea $C$ un camino de $X$ a $(x,y)$ que consta de dos piezas: $C_1$ y $C_2$. La primera pieza, $C_1$, es cualquier camino de $C$ a $(a, y)$ que permanece dentro de $D$; $C_2$ es el segmento de línea horizontal desde $(a, y)$ a $(x,y)$ (). Luego
$$f(x,y) = \int_{C_1} \bold{F} ⋅ d\bold{r} + \int_{C_2} \bold{F} ⋅ d\bold{r}$$La primera integral no depende de x, entonces
$$f_x = \frac{∂}{∂ x}\int_{C_2} \bold{F} ⋅ d\bold{r}$$Si parametrizamos $C_2$ por $\bold{r} (t) = ⟨t, y⟩, a \le t \le x$, entonces
$$\begin{aligned} f_x &= \frac{∂}{∂ x}\int_{C_2} \bold{F} ⋅ d\bold{r}\\ &= \frac{∂}{∂ x}\int_a^x \bold{F}(\bold{r}(t)) ⋅ \bold{r}'(t)dt\\ \end{aligned}$$Según el Teorema Fundamental del Cálculo (parte 1),
$$f_x = \frac{∂}{∂ x}\int_a^x P(t,y)dt = P(x,y$$
Un argumento similar que usa un segmento de línea vertical en lugar de un segmento de línea horizontal muestra que $f_y = Q (x,y)$. Por lo tanto, $∇ f = \bold{F}$ y $\bold{F}$ es conservativa.
Hemos pasado mucho tiempo discutiendo y probando la Independencia de la ruta de los campos conservativos y la Prueba de independencia de la ruta para los campos conservativos, pero podemos resumirlos simplemente: un campo vectorial $\bold{F}$ en un dominio abierto y conectado es conservativo si y solo si es independiente de la trayectoria. Es importante saber esto porque los campos vectoriales conservativos son extremadamente importantes en las aplicaciones, y estos teoremas nos brindan una forma diferente de ver lo que significa ser conservativo usando la independencia de la trayectoria.
Demostrar que un campo vectorial no es conservativo
Usa la independencia de la trayectoria para demostrar que el campo vectorial $\bold{F} (x,y) = ⟨x^2y, y + 5⟩$ no es conservativo.
Como hemos aprendido, el Teorema Fundamental para Integrales de Línea dice que si $\bold{F}$ es conservativo, entonces calcular $\int_C\bold{F} ⋅ d\bold{r}$ tiene dos pasos: primero, encontrar una función potencial $f$ para $\bold{F}$ y, segundo, calcular $f (P_1) - f(P:0 )$, donde $P_1$ es el punto final de $C$ y $P_0$ es el punto de partida.
Para usar este teorema para un campo conservativo $F$, debemos poder encontrar una función potencial $f$ para $\bold{F}$. Por lo tanto, debemos responder la siguiente pregunta: Dado un campo vectorial conservativo $\bold{F}$, ¿cómo encontramos una función $f$ tal que $∇ f = \bold{F}$? Antes de dar un método general para encontrar una función potencial, motivemos el método con un ejercicio.
Encontrando una función potencial
Encuentra una función potencial para $\bold{F} (x,y) = ⟨2xy^3, 3x^2y^2 + cos \;(y)⟩$, demostrando así que $\bold{F}$ es conservativa.
La lógica del ejercicio anterior se extiende a encontrar la función potencial para cualquier campo vectorial conservativo en $ℝ^2$. Por lo tanto, tenemos la siguiente estrategia de resolución de problemas para encontrar funciones potenciales:
Estrategia de resolución de problemas: encontrar una función potencial para un campo vectorial conservativo $\bold{F}\bold{ (x,y) = ⟨P (x,y), Q (x,y)⟩}$
Podemos adaptar esta estrategia para encontrar funciones potenciales para campos vectoriales en $ℝ^3$, como se muestra en el siguiente ejercicio.
Encontrando una función potencial en $ℝ^3$
Encuentra una función potencial para $\bold{F} (x,y) = ⟨2xy, x^2 + 2yz^3, 3y^2z^2 + 2z⟩$, demostrando así que $\bold{F}$ es conservativa.
Podemos aplicar el proceso de encontrar una función potencial a una fuerza gravitacional. Recuerda que, si un objeto tiene masa unitaria y está ubicado en el origen, entonces la fuerza gravitacional en $ℝ^2$ que el objeto ejerce sobre otro objeto de masa unitaria en el punto $(x,y)$ viene dada por el campo vectorial
donde $G$ es la constante gravitacional universal. En el siguiente ejercicio, construimos una función potencial para $\bold{F}$, confirmando así lo que ya sabemos: que la gravedad es conservativa.
Encontrando una función potencial
Encontrar una función potencial $f$ para $\bold{F}(x,y) = -G\big⟨\frac{x}{(x^2+y^2)^{3/2}}, \frac{y}{(x^2+y^2)^{3/2}}\big⟩$
Hasta ahora, hemos trabajado con campos vectoriales que sabemos que son conservativos, pero si no nos dicen que un campo vectorial es conservativo, debemos poder probar si es conservativo. Recuerda que, si $\bold{F}$ es conservativo, $\bold{F}$ tiene la propiedad de parciales cruzadas. Es decir, si $\bold{F} = ⟨P, Q, R⟩$ es conservativo, entonces $P_y = Q_x, P_z = R_x$ y $Q_z = R_y$. Entonces, si $\bold{F}$ tiene la propiedad de parciales cruzadas, ¿es $\bold{F}$ conservativo? Si el dominio de $\bold{F}$ está abierto y simplemente conectado, entonces la respuesta es sí.
La prueba de parciales cruzadas para campos conservativos
Si $\bold{F} = ⟨P, Q, R⟩$ es un campo vectorial en una región abierta simplemente conectada D y $P_y = Q_x, P_z = R_x$ y $Q_z = R_y$ a lo largo de $D$, entonces $\bold{F}$ es conservativo.
Aunque una demostración de este teorema está más allá del alcance del texto, podemos descubrir su poder con algunos ejemplos. Más adelante, veremos por qué es necesario que la región esté simplemente conectada.
Combinando este teorema con la propiedad de las parciales cruzadas, podemos determinar si un campo vectorial dado es conservativo:
Propiedad de parciales cruzadas de campos conservativos
Sea $\bold{F} = ⟨P, Q, R⟩$ un campo vectorial en una región $D$ abierta, simplemente conectada. Entonces $P_y = Q_x, P_z = R_x$ y $Q_z = R_y$ a lo largo de $D$ si y solo si $\bold{F}$ es conservativa.
La versión de este teorema en $ℝ^2$ también es cierta. Si $\bold{F} = ⟨P, Q⟩$ es un campo vectorial en un dominio abierto, simplemente conectado en $ℝ^2$, entonces $\bold{F}$ es conservativo si y solo si $P_y = Q_x$.
Determinando si un campo vectorial es conservativo
Determina si el campo vectorial $\bold{F} (x, y, z) = ⟨xy^2z, x^2yz, z^2⟩$ es conservativo.
Determinando si un campo vectorial es conservativo
Determina si el campo vectorial $\bold{F} (x,y) = ⟨x ln\; (y), \frac{x^2}{2y}⟩$ es conservativo.
Cuando se usa la propiedad de parciales cruzadas de campos conservativos, es importante recordar que un teorema es una herramienta y, como cualquier herramienta, solo se puede aplicar en las condiciones adecuadas. En el caso de la propiedad de parciales cruzadas de los campos conservadores, el teorema se puede aplicar solo si el dominio del campo vectorial está simplemente conectado.
Para ver qué puede salir mal al aplicar mal el teorema, considere el campo vectorial de:
$$\bold{F}(x,y) = \frac{y}{x^2+y^2}\bold{i} + \frac{-x}{x^2+y^2}\bold{j}$$Este campo vectorial satisface la propiedad de parciales cruzadas, ya que
$$\frac{∂}{∂ y}\bigg(\frac{y}{x^2+y^2}\bigg) = \frac{(x^2+y^2) - y(2y)}{(x^2+y^2)^2} = \frac{x^2-y^2}{(x^2+y^2)^2}$$y
$$\frac{∂}{∂ x} \bigg(\frac{-x}{x^2+y^2}\bigg) = \frac{-(x^2+y^2) + x(2x)}{(x^2+y^2)^2} = \frac{x^2-y^2}{(x^2+y^2)^2}$$Dado que $\bold{F}$ satisface la propiedad de las parciales cruzadas, podríamos estar tentados a concluir que $\bold{F}$ es conservativa. Sin embargo, $\bold{F}$ no es conservativa. Para ver esto, deja
$$\bold{r}(t) = ⟨cos\;t, sen\;t ⟩ , 0 \le t \le π$$sea una parametrización de la mitad superior de un círculo unitario orientado en sentido antihorario (denotado como $C_1$) y deja
$$\bold{s}(t) = ⟨cos\;t, -sen\;t ⟩ , 0 \le t \le π$$sea una parametrización de la mitad inferior de un círculo unitario orientado en sentido horario (denotado como $C_2$). Observa que $C_1$ y $C_2$ tienen el mismo punto inicial y final. Dado que $sen^2t + cos^2t = 1$,
$$\bold{F}(\bold{r}(t)) ⋅ \bold{r}' = ⟨sen(t), -cos(t)⟩ ⋅ ⟨-sen(t), cos(t)⟩ = -1$$y
$$\begin{aligned} \bold{F}(\bold{s}(t)) ⋅ \bold{s}' &= ⟨-sen(t), -cos(t)⟩ ⋅ ⟨-sen(t), -cos(t)⟩\\ &= sen^2t + cos^2t\\ &=1 \end{aligned}$$Por lo tanto
$$\int_{C_1}\bold{F} ⋅ d\bold{r} = \int_0^{π} -1dt = -π\;\;\text{ y }\;\;\int_{C_2}\bold{F} ⋅ d\bold{r} = \int_0^{π} 1dt = π$$Luego, $C_1$ y $C_2$ tienen el mismo punto de inicio y final, pero $\int_{C_1}\bold{F} ⋅ d\bold{r}\; ≠ \int_{C_2}\bold{F} ⋅ d\bold{r}$. Por tanto, $\bold{F}$ no es independiente de la trayectoria y $\bold{F}$ no es conservativa.
Para resumir: $\bold{F}$ satisface la propiedad de parciales cruzadas y, sin embargo, $\bold{F}$ no es conservativa. ¿Qué salió mal? ¿Contradice esto la propiedad de parciales cruzadas de los campos conservativos? El problema es que el dominio de $\bold{F}$ es todo $ℝ^2$ excepto el origen.
En otras palabras, el dominio de $\bold{F}$ tiene un agujero en el origen y, por lo tanto, el dominio no está simplemente conectado. Dado que el dominio no está simplemente conectado, la propiedad entre parciales de campos conservativos no se aplica a $\bold{F}$.
Cerramos esta sección mirando un ejercicio de la utilidad del Teorema Fundamental para Integrales de Línea. Ahora que podemos probar si un campo vectorial es conservativo, siempre podemos decidir si el Teorema Fundamental para Integrales de Línea se puede usar para calcular una integral de línea vectorial. Si se nos pide que calculemos una integral de la forma $\int_C\bold{F} ⋅ d\bold{r}$, entonces nuestra primera pregunta debería ser: ¿$\bold{F}$ es conservativa? Si la respuesta es sí, entonces debemos encontrar una función potencial y usar el Teorema Fundamental para Integrales de Línea para calcular la integral. Si la respuesta es no, entonces el teorema no puede ayudarnos y tenemos que usar otros métodos, como usar la ecuación 6.9.
Usando el Teorema Fundamental para Integrales de Línea
Calcula la integral de línea $\int_C \bold{F} ⋅ d\bold{r}$, donde $\bold{F}(x, y, z) = ⟨2xe^yz + e^xz, x^2e^yz, x^2e^y + e^x⟩$ y $C$ es cualquier curva suave que va desde el origen hasta $(1, 1, 1)$
Trabajo realizado en una partícula
Sea $\bold{F} (x,y) = ⟨2xy^2, 2x^2y⟩$ un campo de fuerza. Supón que una partícula comienza su movimiento en el origen y termina su movimiento en cualquier punto de un plano que no está en el eje $x$ ni en el eje $y$. Además, el movimiento de las partículas se puede modelar con una parametrización suave. Demuestra que $\bold{F}$ realiza un trabajo positivo en la partícula.
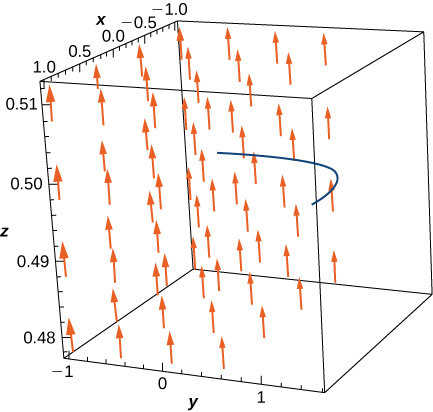
Para los siguientes ejercicios, determina si el campo vectorial es conservativo y, si lo es, encuentra la función potencial.
Para los siguientes ejercicios, evalúa las integrales de línea usando el Teorema Fundamental de las Integrales de Línea.
Para los siguientes ejercicios, determina si el campo vectorial es conservativo y, de ser así, encuentra una función potencial.
Para los siguientes ejercicios, determina si el campo vectorial dado es conservativo y encuentra una función potencial.
Para los siguientes ejercicios, evalúa la integral usando el Teorema Fundamental de las Integrales de Línea.
Para los siguientes ejercicios, sea $\bold{F} (x,y) = 2xy^2\bold{i} + (2yx^2 + 2y)\bold{j}$ y $G (x,y) = (y + x)\bold{i} + (y - x) \bold{j}$, y sea $C_1$ la curva que consiste en el círculo de radio $2$, centrado en el origen y orientado en sentido antihorario, y $C_2$ ser la curva que consta de un segmento de línea desde $(0, 0)$ hasta $(1, 1)$ seguido de un segmento de línea desde $(1, 1)$ hasta $(3, 1 )$.


Para los siguientes ejercicios, demuestra que los siguientes campos vectoriales son conservativos usando una computadora. Calcula $\int_C\bold{F} ⋅ d\bold{r}$ para la curva dada.

En esta sección, examinaremos el teorema de Green, que es una extensión del Teorema Fundamental del Cálculo a dos dimensiones. El teorema de Green tiene dos formas: una forma de circulación y una forma de flujo, las cuales requieren que la región $D$ en la integral doble esté simplemente conectada. Sin embargo, ampliaremos el teorema de Green a regiones que no están simplemente conectadas.
En pocas palabras, el teorema de Green relaciona una integral de línea alrededor de una curva plana $C$ simplemente cerrada y una integral doble sobre la región encerrada por $C$.
El teorema es útil porque nos permite traducir integrales de línea difíciles en integrales dobles más simples o integrales dobles difíciles en integrales de línea más simples.
Recuerda que el Teorema Fundamental del Cálculo dice que
$$\int_a^b F'(x)dx = F(b) - F(a)$$Como enunciado geométrico, esta ecuación dice que la integral sobre la región debajo de la gráfica de $F' (x)$ y arriba del segmento de recta $[a, b]$ depende solo del valor de $F$ en los puntos extremos $a$ y $b$ de ese segmento. Dado que los números $a$ y $b$ son el límite del segmento de línea $[a, b]$, el teorema dice que podemos calcular la integral $\int_a^bF'(x) dx$ con base en la información sobre el límite del segmento de línea $[a, b]$ (). La misma idea es cierta del Teorema Fundamental para Integrales de Línea:
$$\int_C∇ f ⋅ d\bold{r} - f(\bold{r}(a))$$Cuando tenemos una función potencial (una "antiderivada"), podemos calcular la integral de línea basándonos únicamente en la información sobre el límite de la curva $C$.
El teorema de Green toma esta idea y la extiende al cálculo de integrales dobles. El teorema de Green dice que podemos calcular una integral doble sobre la región $D$ basándonos únicamente en la información sobre el límite de $D$.
El teorema de Green también dice que podemos calcular una integral de línea sobre una curva cerrada simple $C$ basada únicamente en la información sobre la región que $C$ encierra. En particular, el teorema de Green conecta una integral doble sobre la región $D$ con una integral de línea alrededor del límite de $D$.
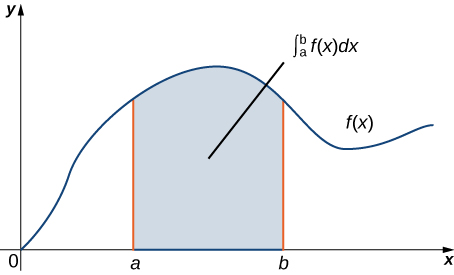
La primera forma del teorema de Green que examinaremos es la forma de circulación. Esta forma del teorema relaciona la integral de línea vectorial sobre una curva plana simple cerrada $C$ con una integral doble sobre la región encerrada por $C$. Por lo tanto, la circulación de un campo vectorial a lo largo de una curva cerrada simple se puede transformar en una integral doble y viceversa.
Teorema de Green - Forma de circulación
Sea $D$ una región abierta, simplemente conectada, con una curva límite $C$ que es una curva cerrada simple, suave a trozos, orientada en sentido antihorario (). Sea $\bold{F} = ⟨P, Q⟩$ un campo vectorial con funciones componentes que tienen derivadas parciales continuas en $D$. Entonces,
$$\oint_C\bold{F} ⋅ d\bold{r} = \oint_C Pdx + Qdy = \iint_D (Q_x - P_y)dA \tag{$6.13$}$$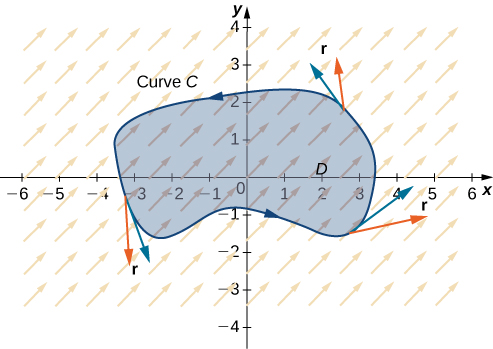
Observa que el teorema de Green solo se puede usar para un campo vectorial bidimensional $\bold{F}$. Si $\bold{F}$ es un campo tridimensional, entonces el teorema de Green no se aplica. Ya que
$$\int_C Pdx + Qdy = \int_C \bold{F} ⋅ \bold{T}ds,$$esta versión del teorema de Green a veces se denomina la forma tangencial del teorema de Green.
La prueba del teorema de Green es bastante técnica y está más allá del alcance de este texto. Aquí examinaremos una demostración del teorema en el caso especial de que $D$ es un rectángulo. Por ahora, observa que podemos confirmar rápidamente que el teorema es cierto para el caso especial en el que $\bold{F} = ⟨P, Q⟩$ es conservativo. En este caso,
$$\oint_C Pdx + Qdy = 0$$porque la circulación es cero en campos vectoriales conservativos. Por la propiedad de parciales cruzadas de los campos conservativos, $\bold{F}$ satisface la condición de parciales cruzadas, por lo que $P_y = Q_x$. Por lo tanto,
$$\iint_D (Qx - Py)dA = \iint_D 0dA = \oint_C Pdx + Qdy,$$lo que confirma el teorema de Green en el caso de campos vectoriales conservativos.
Probemos ahora que la forma de circulación del teorema de Green es verdadera cuando la región $D$ es un rectángulo. Sea $D$ el rectángulo $[a, b] × [c, d]$ orientado en sentido antihorario. Entonces, el límite $C$ de $D$ consta de cuatro partes lisas $C_1, C_2, C_3$ y $C_4$ (). Parametrizamos cada lado de $D$ de la siguiente manera:
$$\begin{aligned} C_1: \bold{r}_1(t) &= ⟨t, c ⟩ , a \le t\le b\\ C_2: \bold{r}_2(t) &= ⟨b, t ⟩ , c \le t\le d\\ -C_3: \bold{r}_3(t) &= ⟨t, d ⟩ , a \le t\le b\\ -C_4: \bold{r}_4(t) &= ⟨a, t ⟩ , c \le t\le d \end{aligned}$$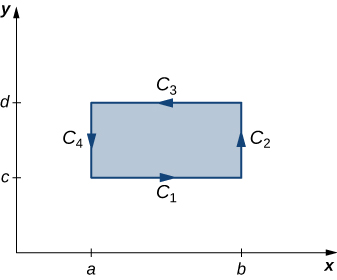
Luego,
Por el Teorema Fundamental del Cálculo,
$$P(t,d) - P(t,c) = \int_c^d \frac{∂}{∂ y} P(t,y)dy\\ \text{ y }\;\; Q(b, t) - Q(a, t) = \int_a^b \frac{∂}{∂ x} Q(x, t)dx$$Por lo tanto,
$$-\int_a^b (P(t, d) - P(t, c))dt + \int_c^d (Q(b, t) - Q(a, t))dt\\ = -\int_a^b\int_c^d \frac{∂}{∂ y} P(t, y)dydt + \int_c^d\int_a^b \frac{∂}{∂ x} Q(x, t)dxdt$$Pero,
Por lo tanto, $\int_C \bold{F} ⋅ d\bold{r} = \iint_D (Qx - Py)dA$ y hemos demostrado el teorema de Green en el caso de un rectángulo.
Para probar el teorema de Green sobre una región general $D$, podemos descomponer $D$ en muchos rectángulos diminutos y usar la prueba de que el teorema funciona sobre rectángulos. Sin embargo, los detalles son técnicos y están más allá del alcance de este texto.
Aplicando el teorema de Green sobre un rectángulo
Calcula la integral de línea
$$\oint_C x^2ydx + (y-3)dy,$$donde $C$ es un rectángulo con vértices $(1, 1), (4, 1), (4, 5)$ y $(1, 5)$ orientados en sentido antihorario.
Aplicando el teorema de Green para calcular el trabajo
Calcula el trabajo realizado en una partícula por el campo de fuerza
$$\bold{F}(x,y) = ⟨y + sen\;x, e^y - x⟩$$a medida que la partícula atraviesa el círculo $x^2 + y^2 = 4$ exactamente una vez en el sentido contrario a las agujas del reloj, comenzando y terminando en el punto $(2, 0)$.
En los dos ejercicios anteriores, la integral doble en el teorema de Green fue más fácil de calcular que la integral de línea, por lo que usamos el teorema para calcular la integral de línea. En el siguiente ejercicio, la integral doble es más difícil de calcular que la integral de línea, por lo que usamos el teorema de Green para transformar una integral doble en una integral de línea.
Aplicando el teorema de Green sobre una elipse
Calcular el área encerrada por la elipse $\frac{x^2}{a^2} + \frac{y^2}{b^2} = 1$ (ver la siguiente figura).

En el ejercicio anterior, usamos el campo vectorial $\bold{F} (x,y) = ⟨P, Q⟩ = ⟨-\frac{y}{2},\frac{x}{2}⟩$ para encontrar el área de cualquier elipse. La lógica del ejercicio se puede ampliar para derivar una fórmula para el área de cualquier región $D$. Sea $D$ cualquier región con un límite que sea una simple curva cerrada $C$ orientada en sentido antihorario. Si $\bold{F} (x,y) = ⟨P, Q⟩ = ⟨-\frac{y}{2},\frac{x}{2}⟩$, entonces $Q_x - P_y = 1$.
Por lo tanto, por la misma lógica que en el ejercicio anterior,
$$\text{área de } D = \iint_D dA = \frac12\oint_C -ydx + xdy \tag{$6.14$}$$Vale la pena señalar que si $\bold{F} (x,y) = ⟨P, Q⟩$ es cualquier campo vectorial con $Q_x - P_y = 1$, entonces la lógica del párrafo anterior funciona. Entonces. La ecuación 6.14 no es la única ecuación que usa parciales mixtos de un campo vectorial para obtener el área de una región.
La forma de circulación del teorema de Green relaciona una integral doble sobre la región $D$ con la integral de línea $\int_C\bold{F} ⋅ \bold{T}ds$, donde $C$ es el límite de $D$. La forma de flujo del teorema de Green relaciona una integral doble sobre la región $D$ con el flujo a través del límite $C$. El flujo de un fluido a través de una curva puede ser difícil de calcular utilizando la integral de la línea de flujo. Esta forma del teorema de Green nos permite transformar una integral de flujo difícil en una integral doble que a menudo es más fácil de calcular.
Debido a que esta forma del teorema de Green contiene el vector normal unitario $\bold{N}$, a veces se le llama la forma normal del teorema de Green.
Recuerda que $\oint_C\bold{F} ⋅ \bold{N}ds = \oint_C - Qdx + Pdy$. Sea $M = -Q$ y $N = P$. Según la forma de circulación del teorema de Green,
$$\begin{aligned} \oint_C - Qdx + Pdy &= \oint_C Mdx + Ndy\\ &= \iint_D N_x - M_y dA\\ &= \iint_D P_x - (-Q)_ydA\\ &= \iint_D P_x + Q_y dA \end{aligned}$$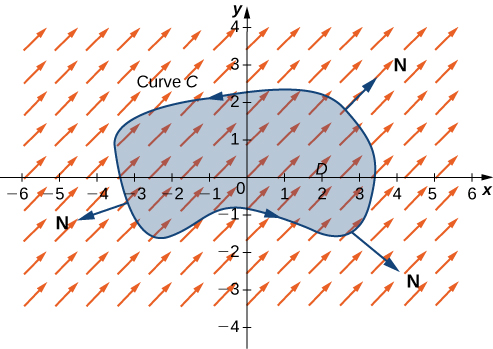
Aplicando el teorema de Green para el flujo a través de un círculo
Sea $C$ un círculo de radio $r$ centrado en el origen (ver siguiente figura) y sea $\bold{F} (x,y) = ⟨x, y⟩$. Calcula el flujo a través de $C$.
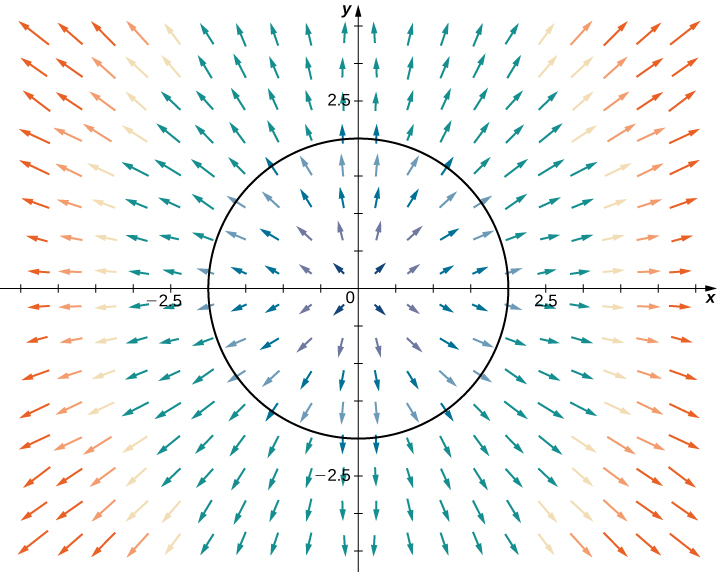
Aplicando el teorema de Green para el flujo a través de un triángulo
Sea $S$ el triángulo con vértices $(0, 0), (1, 0)$ y $(0, 3)$ orientados en el sentido de las agujas del reloj (ver figura). Calcula el flujo de $\bold{F} (x,y) = ⟨P (x,y), Q (x,y)⟩ = ⟨x^2 + ey, x + y⟩$ a través de $S$.

Aplicando el teorema de Green para el flujo de agua a través de un rectángulo
El agua fluye de un manantial ubicado en el origen. La velocidad del agua se modela mediante el campo vectorial $\bold{v} (x,y) = ⟨5x + y, x + 3y⟩\;\; m / seg$. Encuentra la cantidad de agua por segundo que fluye a través del rectángulo con vértices $(-1, -2), (1, -2), (1, 3)$ y $(-1, 3)$, orientados en sentido antihorario (ver la siguiente figura).
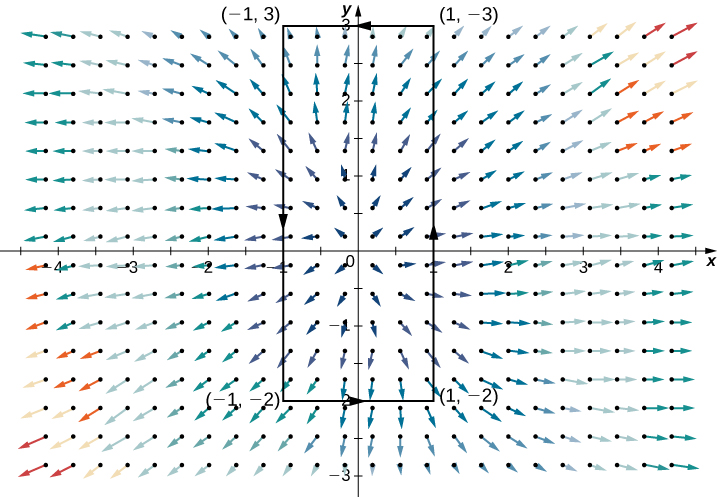
Recuerda que si el campo vectorial $\bold{F}$ es conservativo, $\bold{F}$ no funciona alrededor de curvas cerradas, es decir, la circulación de $\bold{F}$ alrededor de una curva cerrada es cero.
De hecho, si el dominio de $\bold{F}$ está simplemente conectado, entonces $\bold{F}$ es conservativo si y solo si la circulación de $\bold{F}$ alrededor de cualquier curva cerrada es cero. Si reemplazamos la "circulación de $\bold{F}$" con el "flujo de $\bold{F}$", obtenemos una definición de campo vectorial libre de la fuente. Las siguientes declaraciones son todas formas equivalentes de definir un campo libre de la fuente $\bold{F} = ⟨P, Q⟩$ en un dominio simplemente conectado (observa las similitudes con las propiedades de los campos vectoriales conservativos):
En las siguientes escenas interactivas, diseñadas por Daniel Monsivais Velásquez, podrás: en la primera, verificar la propiedad 2, y en la segunda escena interactiva, una aplicación en la mecánica de fluidos.
Recuerda hacer clic en la esquina superior derecha, para interactuar con las escenas en una ventana ampliada.
Encontrando una función de flujo
Verifica que el campo de vector de rotación $\bold{F} (x,y) = ⟨y, -x⟩$ no tenga fuente y encuentra una función de flujo para $\bold{F}$
Los campos vectoriales que son tanto conservativos como libres de fuentes son campos vectoriales importantes. Una característica importante de los campos vectoriales conservativos y libres de la fuente en un dominio simplemente conectado es que cualquier función potencial $f$ de dicho campo satisface la ecuación de Laplace $f_{xx} + f_{yy} = 0$. La ecuación de Laplace es fundamental en el campo de las ecuaciones diferenciales parciales porque modela tales fenómenos como potenciales gravitacionales y magnéticos en el espacio, y el potencial de velocidad de un fluido ideal. Una función que satisface la ecuación de Laplace se llama función armónica. Por lo tanto, cualquier función potencial de un campo vectorial conservativo y libre de la fuente es armónica.
Para ver que cualquier función potencial de un campo vectorial conservativo y libre de fuente en un dominio simplemente conectado es armónica, sea $f$ una función potencial del campo vectorial $\bold{F} = ⟨P, Q⟩$. Entonces, $f_x = P$ y $f_y = Q$ porque $∇ f = \bold{F}$. Por lo tanto, $f_{xx} = P_x$ y $f_{yy} = Q_y$. Como $\bold{F}$ no tiene fuente, $f_{xx} + f_{yy} = P_x + Q_y = 0$, y tenemos que $f$ es armónica.
Satisfaciendo la ecuación de Laplace
Para el campo vectorial $\bold{F} (x,y) = ⟨e^xsen\; y, e^xcos\; y⟩$, verifica que el campo sea tanto conservativo como libre de fuentes, encuentra una función potencial para $\bold{F}$ y verifica que la función potencial sea armónica.
El teorema de Green, como se dijo, se aplica solo a las regiones que están simplemente conectadas, es decir, el teorema de Green, como se dijo hasta ahora, no puede manejar regiones con agujeros. Aquí, ampliamos el teorema de Green para que funcione en regiones con un número finito de agujeros ().

Antes de discutir las extensiones del teorema de Green, necesitamos repasar alguna terminología con respecto al límite de una región. Sea $D$ una región y sea $C$ un componente del límite de $D$.
Decimos que $C$ está orientada positivamente si, mientras caminamos a lo largo de $C$ en la dirección de orientación, la región $D$ está siempre a nuestra izquierda. Por lo tanto, la orientación en sentido antihorario del límite de un disco es una orientación positiva, por ejemplo. La curva $C$ está orientada negativamente si, mientras caminamos por $C$ en la dirección de orientación, la región $D$ siempre está a nuestra derecha. La orientación en el sentido de las agujas del reloj del límite de un disco es una orientación negativa, por ejemplo.
Sea $D$ una región con un número finito de huecos (de modo que $D$ tenga un número finito de curvas de límite) y denota el límite de $D$ con $∂ D$ (). Para extender el teorema de Green para que pueda manejar $D$, dividimos la región $D$ en dos regiones, $D_1$ y $D_2$ (con límites respectivos $∂ D_1$ y $∂ D_2$), de tal manera que $D = D_1 \cup D_2$ y ni $D_1$ ni $D_2$ tienen agujeros.
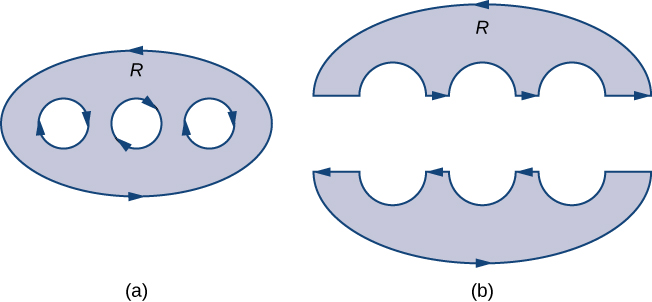
Supón que el límite de $D$ está orientado como en la figura, con los orificios internos con orientación negativa y el límite externo con orientación positiva. El límite de cada región simplemente conectada $D_1$ y $D_2$ está orientado positivamente. Si $\bold{F}$ es un campo vectorial definido en $D$, entonces el teorema de Green dice que
$$\begin{aligned} \oint_{∂ D} \bold{F} ⋅ d\bold{r} &= \oint_{∂ D_1} \bold{F} ⋅ d\bold{r} + \oint_{∂ D_2} \bold{F} ⋅ d\bold{r}\\ &= \iint_{D_1} (Q_x - P_y) dA + \iint_{D_2} (Q_x - P_y) dA\\ &= \iint_D (Q_x - P_y)dA \end{aligned}$$Por lo tanto, el teorema de Green todavía funciona en una región con huecos.
Para ver cómo funciona esto en la práctica, considera el anillo $D$ en la y supón que $\bold{F} = ⟨P, Q⟩$ es un campo vectorial definido en este anillo. La región $D$ tiene un agujero, por lo que no está simplemente conectada. Orienta el círculo exterior del anillo en sentido contrario a las agujas del reloj y el círculo interior en el sentido de las agujas del reloj () de modo que, cuando dividimos la región en $D_1$ y $D_2$, podamos mantener la región a nuestra izquierda mientras caminamos por un camino que atraviesa el límite. Sea $D_1$ la mitad superior del anillo y $D_2$ la mitad inferior. Ninguna de estas regiones tiene agujeros, por lo que hemos dividido $D$ en dos regiones simplemente conectadas.
Etiquetamos cada parte de estos nuevos límites como $P_i$ para alguna $i$, como en la . Si comenzamos en $P$ y viajamos a lo largo del límite orientado, el primer segmento es $P_1$, luego $P_2, P_3$ y $P_4$.
Ahora hemos atravesado $D_1$ y regresado a $P$. Luego, comenzamos en $P$ nuevamente y atravesamos $D_2$. Dado que la primera parte del límite es la misma que $P_4$ en $D_1$, pero orientada en la dirección opuesta, la primera parte de $D_2$ es $-P_4$. A continuación, tenemos $P_5$, luego $-P_2$ y finalmente $P_6$.

La muestra un camino que atraviesa el límite de $D$. Observa que este camino atraviesa el límite de la región $D_1$, regresa al punto de partida y luego atraviesa el límite de la región $D_2$. Además, mientras caminamos por el sendero, la región siempre está a nuestra izquierda. Observa que este recorrido de las trayectorias $P_i$ cubre todo el límite de la región $D$. Si solo hubiéramos atravesado una porción del límite de $D$, entonces no podemos aplicar el teorema de Green a $D$. El límite de la mitad superior del anillo, por lo tanto, es $P_1 \cup P_2 \cup P_3 \cup P_4$ y el límite de la mitad inferior del anillo es $-P_4 \cup P_5 \cup - P_2 \cup P_6$. Entonces, el teorema de Green implica
Por lo tanto, llegamos a la ecuación que se encuentra en el teorema de Green, a saber
$$\oint_{∂ D} \bold{F} ⋅ d\bold{r} = \iint_D (Q_x - P_y)dA$$La misma lógica implica que la forma de flujo del teorema de Green también se puede extender a una región con un número finito de agujeros:
$$\oint_C \bold{F} ⋅ \bold{N} d\bold{s} = \iint_D (Q_x + P_y)dA$$
Usando el teorema de Green en una región con agujeros
Calcula la integral
$$\oint_{∂ D}\bigg(sen\; x - \frac{y^3}{3}\bigg)dx + \bigg(\frac{y^3}{3} +sen\;y\bigg)dy$$donde $D$ es el anillo dado por las desigualdades polares $1 \le \bold{r} \le 2, 0 \le θ \le 2π$
Usando la forma extendida del teorema de Green
Sea $\bold{F} = ⟨P, Q⟩ = \big⟨\frac{y}{x^2 + y^2}, -\frac{x}{x^2 + y^2}\big⟩$ y sea $C$ cualquier curva cerrada simple en un plano orientado en sentido antihorario. ¿Cuáles son los valores posibles de $\oint_C\bold{F} ⋅ d\bold{r}$?
Medir el área desde un límite: el planímetro

Imagina que eres un médico que acaba de recibir una imagen de resonancia magnética del cerebro de tu paciente. El cerebro tiene un tumor (). ¿Qué tan grande es el tumor? Para ser precisos, ¿cuál es el área de la región roja? La sección transversal roja del tumor tiene una forma irregular y, por lo tanto, es poco probable que puedas encontrar un conjunto de ecuaciones o desigualdades para la región y luego poder calcular su área por medios convencionales.
Puedes aproximar el área cortando la región en pequeños cuadrados (un enfoque de suma de Riemann), pero este método siempre da una respuesta con algún error. En lugar de intentar medir el área de la región directamente, podemos usar un dispositivo llamado planímetro rodante para calcular el área de la región exactamente, simplemente midiendo su límite. En este proyecto, investigarás cómo funciona un planímetro y usarás el teorema de Green para demostrar que el dispositivo calcula el área correctamente.
Un planímetro rodante es un dispositivo que mide el área de una región plana trazando el límite de esa región (). Para medir el área de una región, simplemente ejecutamos el trazador del planímetro alrededor del límite de la región. El planímetro mide el número de vueltas a través de las cuales gira la rueda a medida que trazamos el límite; el área de la forma es proporcional a este número de vueltas de rueda. Podemos derivar la ecuación de proporcionalidad precisa usando el teorema de Green. A medida que el trazador se mueve alrededor del límite de la región, el brazo del trazador gira y el rodillo se mueve hacia adelante y hacia atrás (pero no gira).
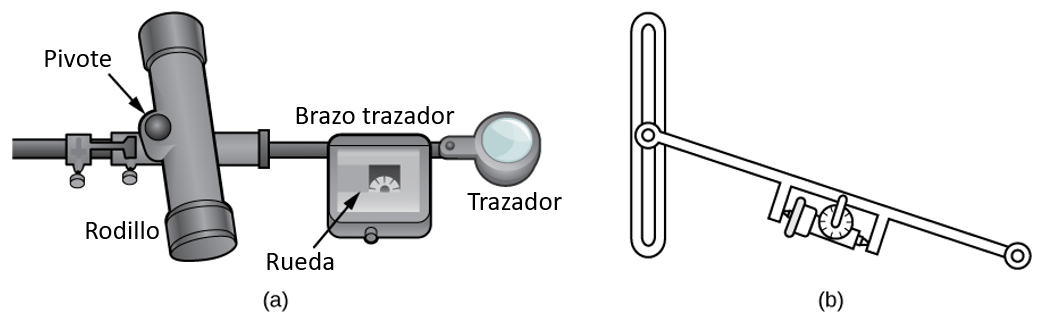
Observa en el siguiente vídeo una animación de Daniel Farah, el cual hace parte de la Unidad Interactiva "El Teorema de Green", del Proyecto Un_100:
Sea $C$ el límite de la región $D$, el área a calcular. A medida que el trazador atraviesa la curva $C$, supón que el rodillo se mueve a lo largo del eje $y$ (dado que el rodillo no gira, se puede asumir que se mueve a lo largo de una línea recta). Utiliza las coordenadas $(x,y)$ para representar puntos en el límite $C$ y las coordenadas $(0, Y)$ para representar la posición del pivote. A medida que el planímetro traza $C$, el pivote se mueve a lo largo del eje $y$ mientras el brazo trazador gira sobre el pivote.
Comienza el análisis considerando el movimiento del trazador a medida que se mueve desde el punto $(x,y)$ en sentido antihorario al punto $(x + dx, y + dy)$ que está cerca de $(x,y)$ ().
El pivote también se mueve, desde el punto $(0, Y)$ al punto cercano $(0, Y + dy)$. ¿Cuánto gira la rueda como resultado de este movimiento? Para responder a esta pregunta, divide el movimiento en dos partes. Primero, haz rodar el pivote a lo largo del eje $y$ desde $(0, Y)$ hasta $(0, Y + dY)$ sin girar el brazo trazador. El brazo trazador luego termina en el punto $(x, y + dY)$ mientras mantiene un ángulo constante $ϕ$ con el eje $x$. En segundo lugar, gira el brazo trazador en un ángulo $dθ$ sin mover el rodillo. Ahora el trazador está en el punto $(x + dx, y + dy)$. Sea $l$ la distancia desde el pivote hasta la rueda y sea $L$ la distancia desde el pivote hasta el trazador (la longitud del brazo del trazador).
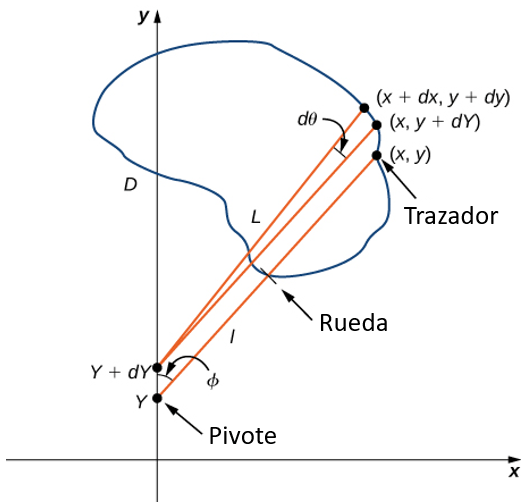
Para los siguientes ejercicios, evalúa las integrales de línea aplicando el teorema de Green.
Para los siguientes ejercicios, usa el teorema de Green.

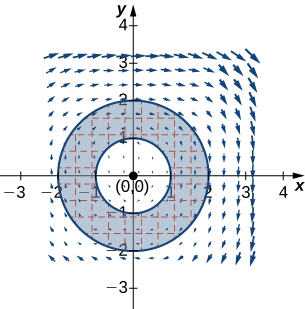
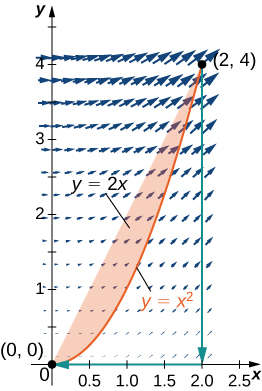
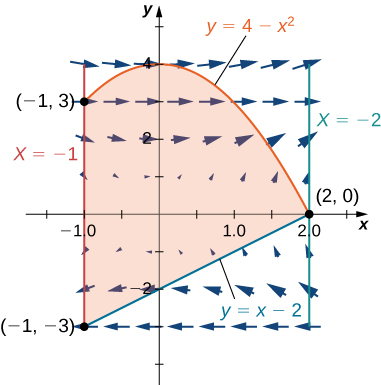
Para los siguientes ejercicios, usa el teorema de Green para encontrar el área.


Para los siguientes ejercicios, usa el teorema de Green para calcular el trabajo realizado por la fuerza $\bold{F}$ sobre una partícula que se mueve en sentido antihorario alrededor de la trayectoria cerrada $C$.
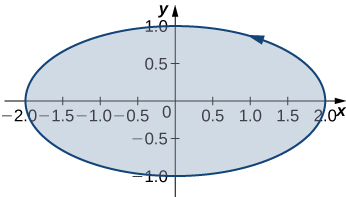
En este apartado, examinaremos dos operaciones importantes en un campo vectorial: divergencia y rotacional. Son importantes para el campo del cálculo por varias razones, incluido el uso del rotacional y la divergencia para desarrollar algunas versiones de dimensiones superiores del Teorema Fundamental del Cálculo. Además, el rotacional y la divergencia aparecen en las descripciones matemáticas de la mecánica de fluidos, el electromagnetismo y la teoría de la elasticidad, que son conceptos importantes en física e ingeniería. También podemos aplicar rotacional y divergencia a otros conceptos que ya exploramos. Por ejemplo, bajo ciertas condiciones, un campo vectorial es conservativo si y solo si su rotacional es cero.
Además de definir el rotacional y la divergencia, observaremos algunas interpretaciones físicas de ellos y demostraremos su relación con los campos vectoriales conservativos y libres de fuentes.
La divergencia es una operación en un campo vectorial que nos dice cómo se comporta el campo hacia o desde un punto. Localmente, la divergencia de un campo vectorial $\bold{F}$ en $ℝ^2$ o $ℝ^3$ en un punto particular $P$ es una medida de la "salida" del campo vectorial en $P$. Si $\bold{F}$ representa la velocidad de un fluido, entonces la divergencia de $\bold{F}$ en $P$ mide la tasa neta de cambio con respecto al tiempo de la cantidad de fluido que fluye desde $P$ (la tendencia del fluido a fluir "fuera" de $P$). En particular, si la cantidad de fluido que fluye hacia $P$ es la misma que la cantidad que sale, entonces la divergencia en $P$ es cero.
Observa la siguiente escena interactiva, la cual hace parte de la Unidad Interactiva "Campos Vectoriales", del Proyecto Prometeo, en la que se usa una caja en diferentes situaciones (tuberías, campo gravitacional, carga eléctrica, etc.), permitiendo analizar si entra más flujo que el que sale o viceversa:
Si $\bold{F} = ⟨P, Q, R⟩$ es un campo vectorial en $ℝ^3$ y $P_x, Q_y$ y $R_z$ existen, entonces la divergencia de $\bold{F}$ se define por
$$\text{div }\bold{F} = P_x + Q_y + R_z = \frac{∂ P}{∂ x} + \frac{∂ Q}{∂ y} + \frac{∂ R}{∂ x} \tag{$6.16$}$$La divergencia de un campo vectorial no es un campo vectorial, sino una función escalar. En términos del operador gradiente $∇ = \big⟨\frac{∂}{∂ x}, \frac{∂}{∂ y}, \frac{∂}{∂ z}\big⟩$, la divergencia puede escribirse simbólicamente como el producto punto:
$$\text{div }\bold{F} = ∇ ⋅ \bold{F}$$Ten en cuenta que esto es simplemente una notación útil, porque el producto escalar de un vector de operadores y un vector de funciones no está definido de manera significativa dada nuestra definición actual de producto escalar.
Si $\bold{F} = ⟨P, Q⟩$ es un campo vectorial en $ℝ^2$, y tanto $P_x$ como $Q_y$ existen, entonces la divergencia de $\bold{F}$ se define de manera similar como
$$\text{div }\bold{F} = P_x + Q_y = \frac{∂ P}{∂ x} + \frac{∂ Q}{∂ y} = ∇ ⋅ \bold{F}$$Para ilustrar este punto, considera los dos campos vectoriales de la . En cualquier punto en particular, la cantidad que fluye hacia adentro es la misma que la cantidad que fluye hacia afuera, por lo que en cada punto la "salida" del campo es cero.
Por lo tanto, esperamos que la divergencia de ambos campos sea cero, y este es el caso, ya que
$$div(⟨1,2⟩) = \frac{∂}{∂ x}(1) + \frac{∂}{∂ y}(2) = 0$$y
$$div(⟨-y,x⟩) = \frac{∂}{∂ x}(-y) + \frac{∂}{∂ y}(x) = 0$$
Retornando a las escenas interactivas de la Unidad Interactiva "Campos Vectoriales", diseñadas por Alejandro Radillo Díaz, presentamos el siguiente modelo en el que puedes ingresar los campos vectoriales y verificar si es divergente o no. Para ello, desplaza la caja (azul) y verifica para cualquier punto. Por ejemplo, usa los campos vectoriales de la para verificar la divergencia en cualquier punto.
Para cada caso, te sugerimos usar una escala menor; por ejemplo, usar los campos vectoriales $⟨0.1, 0.2⟩$ y $⟨-y/5, x/5 ⟩$, que para el análisis de divergencia surte el mismo efecto que los ejemplos originales de la .
Por el contrario, considera el campo vectorial radial $\bold{R} (x,y) = ⟨-x, -y⟩$ en la . En cualquier punto dado, entra más fluido del que sale y, por lo tanto, la "extroversión" del campo es negativa.
Esperamos que la divergencia de este campo sea negativa, y este es el caso, ya que $div (\bold{R}) = \frac{∂}{∂ x}(-x) + \frac{∂}{∂ y}(-y) = -2$.
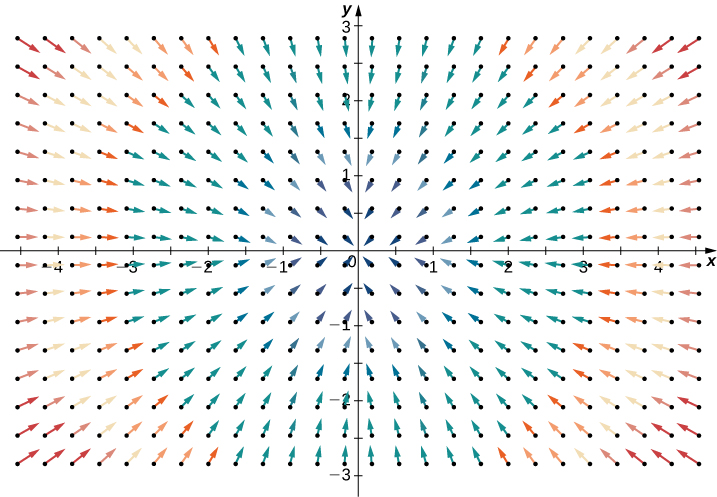
Para tener una idea global de lo que nos dice la divergencia, supón que un campo vectorial en $ℝ^2$ representa la velocidad de un fluido. Imagínate tomando un círculo elástico (un círculo con una forma que puede ser cambiada por el campo vectorial) y soltándolo en un fluido. Si el círculo mantiene su área exacta a medida que fluye a través del fluido, entonces la divergencia es cero. Esto ocurriría para ambos campos vectoriales en la .
Por otro lado, si la forma del círculo se distorsiona de modo que su área se contrae o se expande, entonces la divergencia no es cero.
Imagina dejar caer tal círculo elástico en el campo vectorial radial de la de modo que el centro del círculo aterrice en el punto $(3, 3)$. El círculo fluiría hacia el origen, y mientras lo hacía, el frente del círculo viajaría más lentamente que la parte posterior, causando que el círculo se "arrugara" y perdiera área. Así es como se puede ver una divergencia negativa (verifícalo en la escena interactiva).
Calculando la divergencia en un punto
Si $\bold{F} (x, y, z) = e^x\bold{i} + yz\bold{j} - yz^2\bold{k}$, entonces encuentra la divergencia de $\bold{F}$ en $(0, 2, -1)$.
Una aplicación de la divergencia ocurre en física, cuando se trabaja con campos magnéticos. Un campo magnético es un campo vectorial que modela la influencia de corrientes eléctricas y materiales magnéticos. Los físicos utilizan la divergencia en la ley de Gauss para el magnetismo, que establece que si $\bold{B}$ es un campo magnético, entonces $∇ ⋅ \bold{B} = 0;$ en otras palabras, la divergencia de un campo magnético es cero.
Determinando si un campo es magnético
¿Es posible que $\bold{F} (x,y) = ⟨x^2y, y - xy^2⟩$ sea un campo magnético?
Otra aplicación para la divergencia es detectar si un campo está libre de fuentes. Recuerda que un campo libre de la fuente es un campo vectorial que tiene una función de flujo; de manera equivalente, un campo libre de la fuente es un campo con un flujo que es cero a lo largo de cualquier curva cerrada. Los siguientes dos teoremas dicen que, bajo ciertas condiciones, los campos vectoriales sin fuente son precisamente los campos vectoriales con divergencia cero.
Divergencia de un campo vectorial sin fuente
Si $\bold{F} = ⟨P, Q⟩$ es un campo vectorial continuo sin fuente con funciones componentes diferenciables, entonces $div\; \bold{F} = 0$.
Como $\bold{F}$ no tiene fuente, hay una función $g (x,y)$ con $g_y = P$ y $-g_x = Q$. Por lo tanto, $\bold{F} = ⟨g_y, -g_x⟩$ y $div\; \bold{F} = g_{yx} - g_{xy} = 0$ según el teorema de Clairaut.
Lo contrario de "Divergencia de un campo vectorial libre de fuente" es cierto en regiones simplemente conectadas, pero la prueba es demasiado técnica para incluirla aquí. Por lo tanto, tenemos el siguiente teorema, que puede probar si un campo vectorial en $ℝ^2$ está libre de fuentes.
Prueba de divergencia para campos vectoriales sin fuente
Sea $\bold{F} = ⟨P, Q⟩$ un campo vectorial continuo con funciones componentes diferenciables con un dominio que está simplemente conectado. Entonces, $div \bold{F} = 0$ si y solo si $\bold{F}$ es libre de fuente.
Determinando si un campo está libre de fuentes
¿El campo $\bold{F} (x,y) = ⟨x^2y, 5 - xy^2⟩$ fuente es libre?
Recuerda que la forma de flujo del teorema de Green dice que
$$\oint_C \bold{F} ⋅ \bold{N}ds = \iint_D (P_x + Q_y)dA$$donde $C$ es una curva cerrada simple y $D$ es la región encerrada por $C$. Dado que $P_x + Q_y = div\; \bold{F}$, el teorema de Green a veces se escribe como
$$\oint_C \bold{F} ⋅ \bold{N}ds = \int_D div\;\bold{F}dA$$Por tanto, el teorema de Green se puede escribir en términos de divergencia. Si pensamos en la divergencia como una especie de derivada, entonces el teorema de Green dice que la "derivada" de $\bold{F}$ en una región se puede traducir en una integral de línea de $\bold{F}$ a lo largo del límite de la región. Esto es análogo al Teorema Fundamental del Cálculo, en el que la derivada de una función $f$ en un segmento de línea $[a, b]$ puede traducirse en un enunciado sobre $f$ en el límite de $[a, b]$. Usando la divergencia, podemos ver que el teorema de Green es un análogo dimensional superior del Teorema Fundamental del Cálculo.
Podemos utilizar todo lo que hemos aprendido en la aplicación de la divergencia. Sea $\bold{v}$ un campo vectorial que modela la velocidad de un fluido. Dado que la divergencia de $\bold{v}$ en el punto $\bold{P}$ mide la "salida" del fluido en $\bold{P}, div\; \bold{v} (\bold{P})\gt 0$ implica que sale más fluido de $\bold{P}$ que lo que entra. De manera similar, $div\; \bold{v} (\bold{P}) \lt 0$ implica que más fluido fluye hacia $\bold{P}$ que el que fluye hacia afuera, y $div\; \bold{v} (\bold{P}) = 0$ implica que fluye la misma cantidad de fluido que fluye hacia afuera.
Determinando del flujo de un fluido
Supón que $\bold{v} (x,y) = ⟨-xy, y⟩ , y\gt 0$ modela el flujo de un fluido. ¿Entra más líquido en el punto $(1, 4)$ que sale?
Antes de continuar con el siguiente apartado, interactúa con la siguiente escena, diseñada por Antonio Di Muro, en la cual puedes modificar los campos vectoriales.
Los campos iniciales corresponde al ejercicio anterior, observa que al desplazar el punto $P$, la divergencia siempre será $-3$ (haz clic en el cuadro de la esquina inferior derecha, para ampliar la escena).
La segunda operación en un campo vectorial que examinamos es el rotacional, que mide la extensión de rotación del campo alrededor de un punto. Supón que $\bold{F}$ representa el campo de velocidad de un fluido. Entonces, el rotacional de $\bold{F}$ en el punto $P$ es un vector que mide la tendencia de las partículas cercanas a $P$ a rotar alrededor del eje que apunta en la dirección de este vector. La magnitud del vector rotacional en $P$ mide la rapidez con la que giran las partículas alrededor de este eje. En otras palabras, el rotacional en un punto es una medida del "giro" del campo vectorial en ese punto. Visualmente, imagina colocar una rueda de paletas en un fluido en $P$, con el eje de la rueda de paletas alineado con el vector rotacional (). El rotacional mide la tendencia de la rueda de paletas a girar.
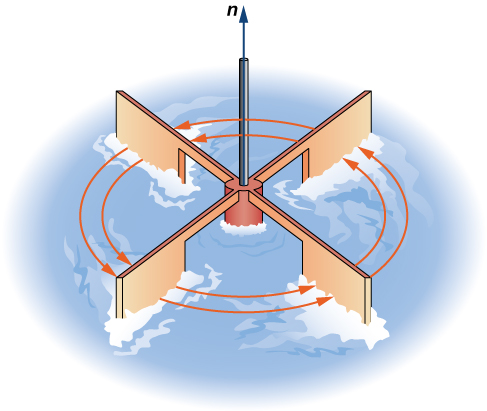
Considera los campos vectoriales de la . En la parte (a), el campo vectorial es constante y no hay espín en ningún punto. Por lo tanto, esperamos que la curvatura del campo sea cero, y este es el caso. La parte (b) muestra un campo rotacional, por lo que el campo tiene giro. En particular, si colocas una rueda de paletas en un campo en cualquier punto de modo que el eje de la rueda sea perpendicular a un plano, la rueda gira en sentido antihorario. Por lo tanto, esperamos que el rotacional del campo sea distinto de cero, y este es de hecho el caso (el rotacional es $2\bold{k}$).
Para ver qué rotacional mide globalmente, imagina que se dejas caer una hoja en el líquido. A medida que la hoja se mueve junto con el flujo de fluido, el rotacional mide la tendencia de la hoja a girar. Si el rotacional es cero, entonces la hoja no gira mientras se mueve a través del fluido.
Nuevamente, una escena interactiva de Alejandro Radillo Díaz nos describe el concepto de rotacional. Inicialmente, observarás un disco flotante que gira según las corrientes de agua justo debajo de él. Posteriormente se indica que el rotacional se aplica a cualquier campo, no necesariamente las corrientes de agua.
Si $\bold{F} = ⟨P, Q, R⟩$ es un campo vectorial en $ℝ^3$, y $P_x, Q_y$ y $R_z$ existen, entonces el rotacional de $\bold{F}$ se define por
$$\begin{aligned} rot \;\bold{F} &= \big(R_y - Q_z\big)\bold{i} + \big(P_z - R_x\big)\bold{j} + \big(Q_x - P_y\big)\bold{k}\\ &= \bigg(\frac{∂ R}{∂ y} - \frac{∂ Q}{∂ z}\bigg)\bold{i} + \bigg(\frac{∂ P}{∂ z} - \frac{∂ R}{∂ x}\bigg)\bold{j} + \bigg(\frac{∂ Q}{∂ x} - \frac{∂ P}{∂ y}\bigg)\bold{k} \tag{$6.17$} \end{aligned}$$La definición de rotacional puede ser difícil de recordar. Para ayudar a recordar, usamos la notación $∇×\bold{F}$ para representar un "determinante" que da la fórmula de rotacional:
$$\begin{vmatrix} \bold{i} & \bold{j} & \bold{k}\\ \frac{∂}{∂ x} & \frac{∂}{∂ y} & \frac{∂}{∂ z}\\ P & Q & R\\ \end{vmatrix}$$El determinante de esta matriz es
$$\begin{aligned} &\;\;\;\;\;\big(R_y - Q_z\big)\bold{i} - \big(Q_x - P_y\big)\bold{j} + \big(Q_x - P_y\big)\bold{k}\\ &= \big(R_y - Q_z\big)\bold{i} + \big(P_z - R_x\big)\bold{j} + \big(Q_x - P_y\big)\bold{k} = rot\;\bold{F} \end{aligned}$$Por lo tanto, esta matriz es una forma de ayudar a recordar la fórmula del rotacional. Sin embargo, ten en cuenta que la palabra determinante se usa de manera muy vaga. Un determinante no se define realmente en una matriz con entradas que son tres vectores, tres operadores y tres funciones.
Si $\bold{F} = ⟨P, Q⟩$ es un campo vectorial en $ℝ^2$, entonces la curva de $\bold{F}$, por definición, es
$$rot\;\bold{F} = \big(Q_x - P_y\big)\bold{k} = \bigg(\frac{∂ Q}{∂ x} - \frac{∂ P}{∂ y}\bigg)\bold{k}$$
Encontrando el rotacional de un campo vectorial tridimensional
Encuentra el rotacional de $\bold{F}(P, Q, R) = ⟨x^2z, e^y + xz, xyz⟩$
Compartimos una escena de GeoGebra, diseñada por Juan Carlos Ponce Campuzano, en la cual puedes incluir los campos vectoriales y calcular tanto la divergencia como el rotacional. Observa que los campos iniciales son los mismos del ejercicio anterior.
Encontrando el rotacional de un campo vectorial bidimensional
Encuentra el rotacional de $\bold{F} = ⟨ P, Q ⟩ = ⟨ y, 0 ⟩$
Observa que si $\bold{F} = ⟨P, Q⟩$ es un campo vectorial en un plano, entonces $rot \bold{F} ⋅ \bold{k} = (Q_x - P_y)\bold{k} ⋅ \bold{k} = Q_x - P_y$. Por lo tanto, la forma de circulación del teorema de Green a veces se escribe como
donde $C$ es una curva cerrada simple y $D$ es la región encerrada por $C$. Por lo tanto, la forma de circulación del teorema de Green se puede escribir en términos del rotacional.
Si pensamos en el rotacional como una especie de derivada, entonces el teorema de Green dice que la "derivada" de $\bold{F}$ en una región puede traducirse en una integral de línea de $\bold{F}$ a lo largo del límite de la región. Esto es análogo al Teorema Fundamental del Cálculo, en el que la derivada de una función $f$ en el segmento de línea $[a, b]$ puede traducirse en un enunciado sobre $f$ en el límite de $[a, b]$. Usando el rotacional, podemos ver que la forma de circulación del teorema de Green es un análogo de dimensión superior del Teorema Fundamental del Cálculo.
Ahora podemos usar lo que hemos aprendido sobre el rotacional para mostrar que los campos gravitacionales no tienen "giro". Supón que hay un objeto en el origen con masa $m_1$ en el origen y un objeto con masa $m_2$. Recuerda que la fuerza gravitacional que el objeto $1$ ejerce sobre el objeto $2$ viene dada por el campo
$$\bold{F}(x,y,z) = -Gm_1m_2\big⟨\frac{x}{\big(x^2+y^2+z^2\big)^{3/2}}, \frac{y}{\big(x^2+y^2+z^2\big)^{3/2}}, \frac{z}{\big(x^2+y^2+z^2\big)^{3/2}}\big⟩$$
Determinando el giro de un campo gravitacional
Demuestra que un campo gravitacional no tiene giro.
Ahora que entendemos los conceptos básicos de divergencia y rotacional, podemos discutir sus propiedades y establecer relaciones entre ellos y los campos vectoriales conservativos.
Si $\bold{F}$ es un campo vectorial en $ℝ^3$, entonces la curva de $\bold{F}$ también es un campo vectorial en $ℝ^3$. Por tanto, podemos tomar la divergencia de un rotacional. El siguiente teorema dice que el resultado siempre es cero. Este resultado es útil porque nos da una forma de demostrar que algunos campos vectoriales no son el rotacional de ningún otro campo. Para dar a este resultado una interpretación física, recuerda que la divergencia de un campo de velocidad $\bold{v}$ en el punto $P$ mide la tendencia del fluido correspondiente a fluir fuera de $P$. Dado que $div\; rot (\bold{v}) = 0$, la tasa neta de flujo en el campo vectorial $rot (\bold{v})$ en cualquier punto es cero. Tomar la curva del campo vectorial $\bold{F}$ elimina cualquier divergencia que estuviera presente en $\bold{F}$.
Por las definiciones de divergencia y rotacional, y por el teorema de Clairaut,
Demostrando que un campo vectorial no es el rotacional de otro
Demuestra que $\bold{F} (x, y, z) = e^x\bold{i} + yz\bold{j} + xz^2\bold{k}$ no es el rotacional de otro campo vectorial. Es decir, demuestra que no hay otro vector $\bold{G}$ con $rot\; \bold{G} = \bold{F}$.
Con los dos teoremas siguientes, mostramos que si $\bold{F}$ es un campo vectorial conservativo, entonces su rotacional es cero, y si el dominio de $\bold{F}$ está simplemente conectado, lo contrario también es cierto. Esto nos da otra forma de probar si un campo vectorial es conservativo.
Rotacional de un campo vectorial conservativo
Si $\bold{F} = ⟨P, Q, R⟩$ es conservativo, entonces $rot\; \bold{F} = 0$.
Dado que los campos vectoriales conservativos satisfacen la propiedad de las parciales cruzadas, todos las parciales cruzadas de $\bold{F}$ son iguales. Por lo tanto,
El mismo teorema es cierto para los campos vectoriales en un plano.
Dado que un campo vectorial conservativo es el gradiente de una función escalar, el teorema anterior dice que $rot\; ∇ (f) = 0$ para cualquier función escalar $f$. En términos de nuestra notación de rotación, $∇ × ∇ (f) = 0$. Esta ecuación tiene sentido porque el producto cruz de un vector consigo mismo es siempre el vector cero. A veces, la ecuación $∇ × ∇ (f) = 0$ se simplifica como $∇ × ∇ = 0$.
Prueba de rotacional para un campo conservativo
Sea $\bold{F} = ⟨P, Q, R⟩$ un campo vectorial en el espacio en un dominio simplemente conectado. Si el rotacional $\bold{F} = 0$, $\bold{F}$ es conservativo.
Como $rot\; \bold{F} = 0$, tenemos que $R_y = Q_z, P_z = R_x$ y $Q_x = P_y$. Por lo tanto, $\bold{F}$ satisface la propiedad de parciales cruzadas en un dominio simplemente conectado, y la propiedad de parciales cruzadas de campos conservativos implica que $\bold{F}$ es conservativo.
El mismo teorema también es cierto en un plano. Por lo tanto, si $\bold{F}$ es un campo vectorial en un plano o en el espacio y el dominio está simplemente conectado, entonces $\bold{F}$ es conservativo si y solo si $rot\; \bold{F} = 0$.
Prueba de si un campo vectorial es conservador
Usa el rotacional para determinar si $\bold{F} (x, y, z) = ⟨yz, xz, xy⟩$ es conservativo.
Hemos visto que el rotacional de un gradiente es cero. ¿Qué es la divergencia de un gradiente? Si $f$ es una función de dos variables, entonces $div\; (∇ f) = ∇ ⋅ (∇ f) = f_{xx} + f_{yy}$. Abreviamos este "producto de doble punto" como $∇^2$. Este operador se llama operador de Laplace, y en esta notación la ecuación de Laplace se convierte en $∇^2 f = 0$. Por lo tanto, una función armónica es una función que se vuelve cero después de tomar la divergencia de un gradiente.
De manera similar, si $f$ es una función de tres variables, entonces
$$div \;(∇ f) = ∇ ⋅ (∇ f) = f_{xx} + f_{yy} + f_{zz}$$Usando esta notación obtenemos la ecuación de Laplace para funciones armónicas de tres variables:
$$∇^2 f = 0$$Las funciones armónicas surgen en muchas aplicaciones. Por ejemplo, la función potencial de un campo electrostático en una región del espacio que no tiene carga estática es armónica.
En la siguiente escena interactiva, diseñada por Lenore Horner, hemos ingresado el campo vectorial $\bold{F}$ del ejercicio anterior. Puedes mover el punto $A$ y observar que su rotacional es cero para cualquier punto $A$. Puedes cambiar las componentes de $\bold{F}$, para el análisis que desees. ¡Haz clic en el botón de la esquina inferior derecha para interactuar en pantalla completa!
Analizando una función
¿Es posible que $f (x,y) = x^2 + x - y$ sea la función potencial de un campo electrostático que se encuentra en una región de $ℝ^2$ libre de carga estática?
Para los siguientes ejercicios, determina si la afirmación es verdadera o falsa.
Para los siguientes ejercicios, encuentre el rotacional de $\bold{F}$.
Para los siguientes ejercicios, encuentre la divergencia de $\bold{F}$.
Para los siguientes ejercicios, determine si cada uno de los funciones escalares dadas es armónica.
Para los siguientes ejercicios, usa $\bold{r} = | r |$ y $\bold{r} = (x, y, z)$.
Para los siguientes ejercicios, use un sistema de álgebra computarizada para encontrar la curva de los campos vectoriales dados.
Para los siguientes ejercicios, encuentra la divergencia de $\bold{F}$ en el punto dado.
Para los siguientes ejercicios, encuentra la rotación de $\bold{F}$ en el punto dado.
Para los siguientes ejercicios, considera un cuerpo rígido que gira alrededor del eje $x$ en sentido antihorario con velocidad angular constante $ω = ⟨a, b, c⟩$. Si $P$ es un punto en el cuerpo ubicado en $\bold{r} = x\bold{i} + y\bold{j} + z\bold{k}$, la velocidad en $P$ está dada por el campo vectorial $\bold{F} = ω×\bold{r}$.

En los siguientes ejercicios, supón que $∇ ⋅ \bold{F} = 0$ y $∇ ⋅ \bold{G} = 0$.
En los siguientes ejercicios, supón que un objeto sólido en $ℝ^3$ tiene una distribución de temperatura dada por $T (x, y, z)$. El campo del vector de flujo de calor en el objeto es $\bold{F} = -k∇ T$, donde $k\gt 0$ es una propiedad del material. El vector de flujo de calor apunta en la dirección opuesta a la del gradiente, que es la dirección de mayor disminución de temperatura. La divergencia del vector de flujo de calor es $∇ ⋅ \bold{F} = -k∇ ⋅ ∇ T = -k∇^2 T$.

Hemos visto que una integral de línea es una integral sobre una trayectoria en un plano o en el espacio. Sin embargo, si deseamos integrar sobre una superficie (un objeto bidimensional) en lugar de una ruta (un objeto unidimensional) en el espacio, entonces necesitamos un nuevo tipo de integral que pueda manejar la integración sobre objetos en dimensiones superiores. Podemos extender el concepto de una integral de línea a una integral de superficie para permitirnos realizar esta integración.
Las integrales de superficie son importantes por las mismas razones que las integrales de línea. Tienen muchas aplicaciones para la física y la ingeniería, y nos permiten desarrollar versiones de dimensiones superiores del Teorema Fundamental del Cálculo. En particular, las integrales de superficie nos permiten generalizar el teorema de Green a dimensiones más altas y aparecen en algunos teoremas importantes que discutiremos en secciones posteriores.
Una integral de superficie es similar a una integral de línea, excepto que la integración se realiza sobre una superficie en lugar de una trayectoria. En este sentido, las integrales de superficie amplían nuestro estudio de integrales de línea. Al igual que con las integrales de línea, hay dos tipos de integrales de superficie: una integral de superficie de una función con valores escalares y una integral de superficie de un campo vectorial.
Sin embargo, antes de que podamos integrar sobre una superficie, debemos considerar la superficie en sí. Recuerda que para calcular una integral de línea escalar o vectorial sobre la curva $C$, primero necesitamos parametrizar $C$.
De manera similar, para calcular una integral de superficie sobre la superficie $S$, necesitamos parametrizar $S$. Es decir, necesitamos un concepto de trabajo de una superficie parametrizada (o una superficie paramétrica), de la misma forma que ya tenemos un concepto de curva paramétrica.
Una superficie parametrizada viene dada por una descripción de la forma
$$\bold{r} (u, v) = ⟨x (u, v), y (u, v), z (u, v)⟩$$Observa que esta parametrización involucra dos parámetros, $u$ y $v$, porque una superficie es bidimensional y, por lo tanto, se necesitan dos variables para trazar la superficie. Los parámetros $u$ y $v$ varían en una región denominada dominio de parámetros, o parámetros espaciales, el conjunto de puntos en el plano $uv$ que pueden sustituirse en $\bold{r}$. Cada elección de $u$ y $v$ en el dominio del parámetro da un punto en la superficie, así como cada elección de un parámetro $t$ da un punto en una curva parametrizada. La superficie completa se crea haciendo todas las elecciones posibles de $u$ y $v$ sobre el dominio de parámetros.
Dada una parametrización de la superficie $\bold{r} (u, v) = ⟨x (u, v), y (u, v), z (u, v)⟩$, el dominio de parámetros de la parametrización es el conjunto de puntos en el plan $uv$ que se puede sustituir en $\bold{r}$.
Parametrizando un cilindro
Describir la superficie $S$ parametrizada por
$$\bold{r} (u, v) = ⟨cos\; u, sen\; u, v⟩, -\infin \lt u \lt \infin, -\infin \lt v \lt \infin$$
Del ejercicio anterior se deduce que podemos parametrizar todos los cilindros de la forma $x^2 + y^2 = R^2$. Si $S$ es un cilindro dado por la ecuación $x^2 + y^2 = R^2$, entonces una parametrización de $S$ es $\bold{r} (u, v) = ⟨R cos\; u, R sen\; u, v⟩, 0 \le u \lt 2π, -\infin \lt v \lt \infin$.
También podemos encontrar diferentes tipos de superficies dada su parametrización, o podemos encontrar una parametrización cuando se nos da una superficie.
Describiendo una superficie
Describir la superficie $S$ parametrizada por
$$\bold{r} (u, v) = ⟨u cos\; v, u sen\; v, u^2⟩, 0 \le u \lt\infin, 0 \le v \lt 2π$$
Encontrando una parametrización
Dar una parametrización del cono $x^2 + y^2 = z^2$ que se encuentra en o sobre el plano $z = -2$.
Hemos discutido las parametrizaciones de varias superficies, pero dos tipos importantes de superficies necesitan una discusión separada: esferas y gráficos de funciones de dos variables. Para parametrizar una esfera, es más fácil utilizar coordenadas esféricas. La esfera de radio $ρ$ centrada en el origen viene dada por la parametrización
$$\bold{r} (ϕ, θ) = ⟨ρ cos θ sin ϕ, ρ sin θ sin ϕ, ρ cos\; ϕ⟩, 0 \le θ \le 2π, 0 \le ϕ \le π$$La idea de esta parametrización es que a medida que $ϕ$ se desplaza hacia abajo desde el eje $z$ positivo, se traza un círculo de radio $ρ sen\; ϕ$ dejando que $θ$ vaya de $0$ a $2π$. Para ver esto, fijemos $ϕ$. Luego
$$\begin{aligned} x^2+y^2 &= (ρ cos\;θ sen\;ϕ)^2 + (ρ sen\;θ sen\;ϕ)^2\\ &= ρ^2 sen^2ϕ(cos^2θ + sen^2θ)\\ &= ρ^2sen^2ϕ\\ &= (ρ sen\;ϕ)^2 \end{aligned}$$Esto da como resultado el círculo deseado (observa la siguiente figura).

Escena interactiva diseñada por Lenore Horner
Finalmente, para parametrizar la gráfica de una función de dos variables, primero dejamos que $z = f(x,y)$ sea una función de dos variables. La parametrización más simple de la gráfica de $f$ es $\bold{r} (x,y) = ⟨x, y, f(x,y)⟩$, donde $x$ e $y$ varían en el dominio de f(). Por ejemplo, la gráfica de $f (x,y) = x^2y $ se puede parametrizar mediante $\bold{r} (x,y) = ⟨x, y, x^2y⟩$, donde los parámetros $x$ e $y$ varían en el dominio de $f$. Si solo nos importa una parte de la gráfica de $f$ (digamos, la parte de la gráfica sobre el rectángulo $[1, 3] × [2, 5]$), entonces podemos restringir el dominio del parámetro para dar esta parte de la superficie:
$$\bold{r} (x,y) = ⟨x, y, x^2y⟩, 1 \le x \le 3, 2 \le y \le 5$$De manera similar, si $S$ es una superficie dada por la ecuación $x = g (y, z)$ o la ecuación $y = h (x, z)$, entonces una parametrización de $S$ es $\bold{r} (y, z) = ⟨g (y, z), y, z⟩$ o $\bold{r} (x, z) = ⟨x, h (x, z), z⟩$, respectivamente. Por ejemplo, la gráfica del paraboloide $2y = x^2 + z^2$ puede parametrizarse mediante $\bold{r} (x, z) = ⟨x, \frac{x^2 + z^2}{2}, z⟩, 0 \le x \lt\infin, 0 \le z \lt\infin$. Observa que no es necesario que varíe todo el dominio de $y$ porque $x$ y $z$ son cuadrados.
Ahora generalicemos las nociones de suavidad y regularidad a una superficie paramétrica. Recuerda que la parametrización de la curva $\bold{r} (t), a \le t \le b$ es regular si $\bold{r}' (t)\;≠\; 0$ para todo $t$ en $[a, b]$. Para una curva, esta condición asegura que la imagen de $\bold{r}$ sea realmente una curva y no solo un punto. Por ejemplo, considere la parametrización de la curva $\bold{r} (t) = ⟨1, 2⟩, 0 \le t \le 5$. La imagen de esta parametrización es simplemente el punto $(1, 2)$, que no es una curva. Observa también que $\bold{r}' (t) = 0$. El hecho de que la derivada sea cero indica que en realidad no estamos mirando una curva.

De manera análoga, nos gustaría una noción de regularidad para las superficies, de modo que una parametrización de superficies realmente traza una superficie. Para motivar la definición de regularidad de una parametrización de superficie, considera la parametrización
$$\bold{r} (u, v) = ⟨0, cos \;v, 1⟩, 0 \le u \le 1, 0 \le v \le π$$Aunque esta parametrización parece ser la parametrización de una superficie, observa que la imagen es en realidad una línea (). ¿Cómo evitar parametrizaciones como ésta? ¿Parametrizaciones que no dan una superficie real?
Observa que $\bold{r}_u = ⟨0, 0, 0⟩$ y $\bold{r}_v = ⟨0, -sen\; v, 0⟩$, y el producto cruz correspondiente es cero. El análogo de la condición $\bold{r}'(t) = 0$ es que $\bold{r}_u × \bold{r}_v$ no es cero para el punto $(u, v)$ en el dominio del parámetro, que es una parametrización regular.
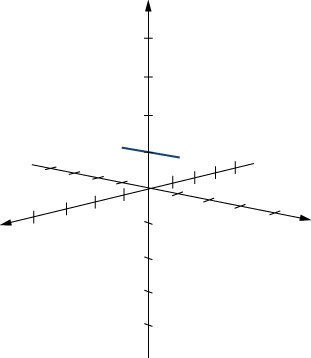
La parametrización $\bold{r} (u, v) = ⟨x (u, v), y (u, v), z (u, v)⟩$ es una parametrización regular si $\bold{r}_u × \bold{r}_v$ no es cero para el punto $(u, v)$ en el dominio de parámetro.
Si la parametrización $\bold{r}$ es regular, entonces la imagen de $\bold{r}$ es un objeto bidimensional, como debería ser una superficie. A lo largo de este capítulo, se supone que las parametrizaciones $\bold{r} (u, v) = ⟨x (u, v), y (u, v), z (u, v)⟩$ son regulares.
Recuerda que la parametrización de la curva $\bold{r} (t), a \le t \le b $es suave si $\bold{r}' (t)$ es continua y $\bold{r}' (t)\;≠\; 0$ para todo $t$ en $[a, b]$. De manera informal, la parametrización de una curva es suave si la curva resultante no tiene esquinas pronunciadas. La definición de parametrización de una superficie lisa es similar. De manera informal, la parametrización de una superficie es suave si la superficie resultante no tiene esquinas afiladas.
La parametrización $\bold{r} (u, v) = ⟨x (u, v), y (u, v), z (u, v)⟩$ es una parametrización regular si $\bold{r}_u × \bold{r}_v$ no es cero para el punto $(u, v)$ en el dominio de parámetro.
Una parametrización de superficie $\bold{r} (u, v) = ⟨x (u, v), y (u, v), z (u, v)⟩$ es suave si el vector $\bold{r}_u × \bold{r}_v$ no es cero para cualquier elección de $u$ y $v$ en el dominio de parámetros.
Una superficie también puede ser lisa por partes si tiene caras lisas pero también tiene ubicaciones donde las derivadas direccionales no existen.
Nuestro objetivo es definir una integral de superficie y, como primer paso, hemos examinado cómo parametrizar una superficie. El segundo paso es definir el área de superficie de una superficie paramétrica. La notación necesaria para desarrollar esta definición se utiliza en el resto de este capítulo.
Sea $S$ una superficie con parametrización $\bold{r} (u, v) = ⟨x (u, v), y (u, v), z (u, v)⟩$ sobre algún dominio de parámetros $D.$ Suponemos aquí y a lo largo de la superficie la parametrización $\bold{r} (u, v) = ⟨x (u, v), y (u, v), z (u, v)⟩$ es continuamente diferenciable, es decir, cada función componente tiene derivadas parciales continuas. En aras de la simplicidad, supón que $D$ es un rectángulo (aunque el siguiente material puede extenderse para manejar dominios de parámetros no rectangulares). Divide el rectángulo $D$ en subrectángulos $D_{ij}$ con ancho horizontal $Δ u$ y longitud vertical $Δ v$. Supón que $i$ varía de $1$ a $m$ y $j$ varía de $1$ a $n$, de modo que $D$ se subdivide en $mn$ rectángulos. Esta división de $D$ en subrectángulos da una división correspondiente de la superficie $S$ en piezas $S_{ij}$. Elige el punto $P_{ij}$ en cada pieza $S_{ij}$. El punto $P_{ij}$ corresponde al punto $(u_i, v_j)$ en el dominio de los parámetros.
Ten en cuenta que podemos formar una cuadrícula con líneas paralelas al eje $u$ y el eje $v$ en el plano $uv$. Estas líneas de la cuadrícula corresponden a un conjunto de curvas de cuadrícula en la superficie $S$ que está parametrizada por $\bold{r} (u, v)$. Sin pérdida de generalidad, asumimos que $P_{ij}$ está ubicado en la esquina de dos curvas de la cuadrícula, como en la .
Si pensamos en $\bold{r}$ como un mapeo desde el plano $uv$ hasta $ℝ^3$, las curvas de la cuadrícula son la imagen de las líneas de la cuadrícula debajo de $\bold{r}$. Para ser precisos, considera las líneas de la cuadrícula que pasan por el punto $(u_i, v_j)$. Una línea está dada por $x = u_i, y = v$; el otro está dado por $x = u, y = v_j$. En la primera línea de la cuadrícula, el componente horizontal se mantiene constante, produciendo una línea vertical que pasa por $(u_i, v_j)$. En la segunda línea de la cuadrícula, el componente vertical se mantiene constante, produciendo una línea horizontal que pasa por $(u_i, v_j)$.
Las curvas de la cuadrícula correspondientes son $r (u_i, v)$ y $r (u, v_j)$, y estas curvas se intersecan en el punto $P_{ij}$.
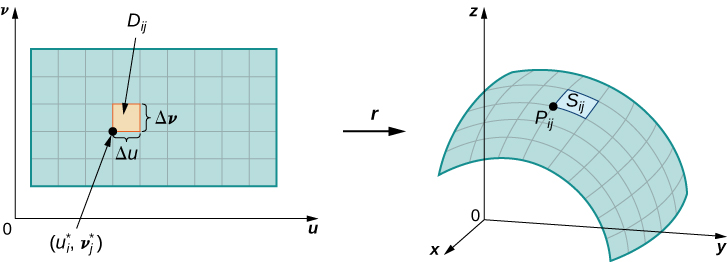
Ahora considera los vectores que son tangentes a estas curvas de la cuadrícula. Para la curva de la cuadrícula $\bold{r} (u_i, v)$, el vector tangente en $P_{ij}$ es
$$\bold{t}_v(P_{ij}) = \bold{r}_v(u_i, v_j) = ⟨x_v(u_i, v_j), y_v(u_i, v_j), z_v(u_i, v_j)⟩$$Para la curva de la cuadrícula $\bold{r} (u, v_j)$, el vector tangente en $P_{ij}$ es
Si el vector $\bold{N} = \bold{t}_u (P_{ij}) × \bold{t}_v (P_{ij})$ existe y no es cero, entonces existe el plano tangente en $P_{ij}$ (). Si la pieza $S_{ij}$ es lo suficientemente pequeña, entonces el plano tangente en el punto $P_{ij}$ es una buena aproximación de la pieza $S_{ij}$.
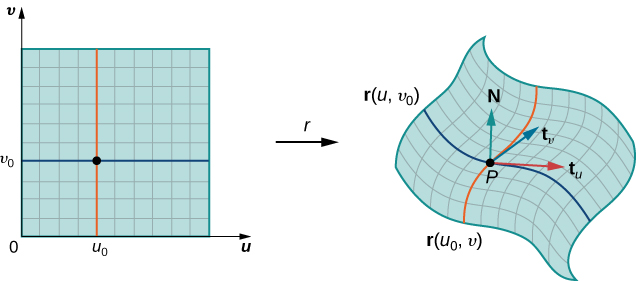
El plano tangente en $P_{ij}$ contiene los vectores $\bold{t}u (P_{ij})$ y $\bold{t}_v (P_{ij})$ y, por lo tanto, el paralelogramo generado por $\bold{t}u (P_{ij})$ y $\bold{t}_v (P_{ij})$ está en el plano tangente. Dado que el rectángulo original en el plano $uv$ correspondiente a $S_{ij}$ tiene ancho $Δ u$ y largo $Δ v$, el paralelogramo que usamos para aproximar $S_{ij}$ es el paralelogramo generado por $Δ u\bold{t}_u (P_{ij})$ y $Δ v\bold{t}_v (P_{ij})$. En otras palabras, escalamos los vectores tangentes mediante las constantes $Δ u$ y $Δ v$ para que coincidan con la escala de la división original de rectángulos en el dominio de parámetros. Por lo tanto, el área del paralelogramo utilizada para aproximar el área de $S_ij$ es
$$Δ S_{ij} \approx \big|\big| \big(Δ u\bold{t}_u(P_{ij})\big) × \big(Δ v\bold{t}_v(P_{ij})\big)\big|\big| = \big|\big|\bold{t}_u(P_{ij})× \bold{t}_v(P_{ij})\big|\big| Δ uΔ v$$La variación del punto $P_{ij}$ sobre todas las piezas $S_{ij}$ y la aproximación anterior conduce a la siguiente definición del área de superficie de una superficie paramétrica ().
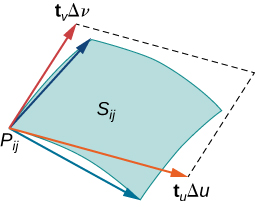
Sea $\bold{r} (u, v) = ⟨x (u, v), y (u, v), z (u, v)⟩$ con el dominio de parámetros $D$ una parametrización suave de la superficie $S$. Además, supón que $S$ se traza sólo una vez, ya que $(u, v)$ varía sobre $D$. El área de superficie de $S$ es
$$\iint_D ||\bold{t}_u × \bold{t}_v ||dA \tag{$6.18$}$$donde
$$\bold{t}_u = \big⟨\frac{∂ x}{∂ u}, \frac{∂ y}{∂ u}, \frac{∂ z}{∂ u}\big⟩\;\;\text{y}\;\;\big⟨\frac{∂ x}{∂ v}, \frac{∂ y}{∂ v}, \frac{∂ z}{∂ v}\big⟩$$
Calculando el área de la superficie
Calcula el área de la superficie lateral (el área del "lado", sin incluir la base) del cono circular recto con altura $h$ y radio $r$.
Calculando el área de la superficie
Demuestra que el área de la superficie de la esfera $x^2 + y^2 + z^2 = r^2$ es $4π r^2$
Además de parametrizar superficies dadas por ecuaciones o formas geométricas estándar como conos y esferas, también podemos parametrizar superficies de revolución. Por tanto, podemos calcular el área de superficie de una superficie de revolución utilizando las mismas técnicas. Sea $y = f(x) \ge 0$ una función positiva de una sola variable en el dominio $a \le x \le b$ y sea $S$ la superficie obtenida al rotar $f$ sobre el eje $x$ (). Sea $θ$ el ángulo de rotación. Entonces, $S$ se puede parametrizar con los parámetros $x$ y $θ$ mediante
$$\bold{r} (x, θ) = ⟨x, f(x) cos \;θ, f(x) sen \;θ⟩, a \le x \le b, 0 \le x \lt 2π$$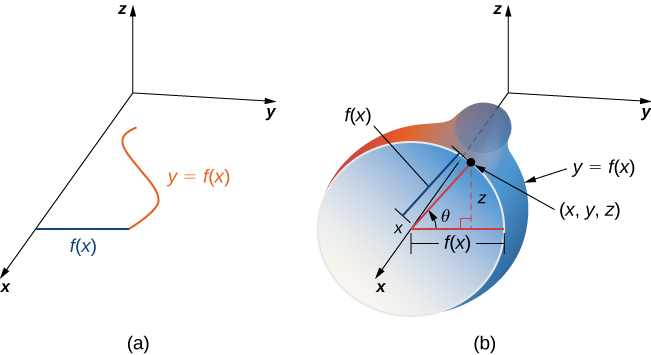

Ahora que podemos parametrizar superficies y podemos calcular sus áreas de superficie, podemos definir integrales de superficie. Primero, veamos la integral de superficie de una función con valores escalares. De manera informal, la integral de superficie de una función con valores escalares es un análogo de una integral de línea escalar en una dimensión superior. El dominio de integración de una integral de línea escalar es una curva parametrizada (un objeto unidimensional); el dominio de integración de una integral de superficie escalar es una superficie parametrizada (un objeto bidimensional).
Por lo tanto, la definición de integral de superficie sigue muy de cerca la definición de integral de línea. Para las integrales de línea escalar, cortamos la curva de dominio en trozos pequeños, elegimos un punto en cada trozo, calculamos la función en ese punto y tomamos un límite de la suma de Riemann correspondiente. Para integrales de superficie escalar, cortamos la región del dominio (ya no es una curva) en trozos diminutos y procedemos de la misma manera.
Sea S una superficie lisa a trozos con parametrización $\bold{r} (u, v) = ⟨x (u, v), y (u, v), z (u, v)⟩$〉 con dominio de parámetros $D$ y sea $f (x, y, z)$ una función con un dominio que contenga $S$. Por ahora, supón que el dominio de parámetros $D$ es un rectángulo, pero podemos extender la lógica básica de cómo procedemos a cualquier dominio de parámetros (la elección de un rectángulo es simplemente hacer la notación más manejable). Divide el rectángulo $D$ en subrectángulos $D_{ij}$ con ancho horizontal $Δ u$ y longitud vertical $Δ v$. Supón que $i$ varía de $1$ a $m$ y $j$ varía de $1$ a $n$, de modo que $D$ se subdivide en $mn$ rectángulos. Esta división de $D$ en subrectángulos da una división correspondiente de $S$ en piezas $S_{ij}$. Elige el punto $P_{ij}$ en cada pieza $S_{ij}$, evalúa $P_{ij}$ en $f$ y multiplica por el área $Δ S_{ij}$ para formar la suma de Riemann
$$\sum_{i=1}^m\sum_{j=1}^n f(P_{ij})Δ S_{ij}$$Para definir una integral de superficie de una función con valores escalares, dejamos que las áreas de las piezas de $S$ se reduzcan a cero tomando un límite
La integral de superficie de una función con valores escalares de $f$ sobre una superficie lisa a trozos $S$ es
$$\iint_S f(x,y,z)dS = \lim\limits_{m,n \to \infin} \sum_{i=1}^m\sum_{j=1}^n f(P_{ij})Δ S_{ij}$$Antes de continuar, presentamos la siguiente escena interactiva, diseñada por Elena E. Álvarez Sáiz, se considera una superficie S dada por $z=(x,y)$ que está definida sobre un rectángulo $R=[0,a]× [0,b]$, una partición de $R$ en $mn$ subrectángulos. Se considera el área de la superficie que se proyecta sobre cada uno de los subrectángulos y se aproxima por el área de un trozo de plano tangente a la superficie en un punto cualquiera del subrectángulo.
En la escena interactiva, calculando el límite de la suma de todas estas áreas cuando la norma de la partición tiende a cero, se podrá obtener el área de la superficie siempre que el límite exista y no dependa ni de la partición ni del punto elegido.
Nuevamente, observa las similitudes entre esta definición y la definición de una integral de línea escalar. En la definición de una integral de línea cortamos una curva en pedazos, evaluamos una función en un punto de cada pieza y dejamos que la longitud de las piezas se reduzca a cero tomando el límite de la suma de Riemann correspondiente. En la definición de integral de superficie, cortamos una superficie en pedazos, evaluamos una función en un punto de cada pieza y dejamos que el área de las piezas se reduzca a cero tomando el límite de la suma de Riemann correspondiente. Por lo tanto, una integral de superficie es similar a una integral de línea pero en una dimensión superior.
La definición de una integral de línea escalar puede extenderse a dominios de parámetros que no son rectángulos utilizando la misma lógica utilizada anteriormente. La idea básica es cortar el dominio del parámetro en trozos pequeños, elegir un punto de muestra en cada trozo, etc. La forma exacta de cada pieza en el dominio de la muestra se vuelve irrelevante a medida que las áreas de las piezas se reducen a cero.
Las integrales de superficie escalar son difíciles de calcular a partir de la definición, al igual que las integrales de línea escalar. Para desarrollar un método que facilite el cálculo de integrales de superficie, aproximamos las áreas de superficie $Δ S_{ij}$ con pequeñas piezas de un plano tangente, tal como hicimos en la subsección anterior. Recuerda la definición de los vectores $\bold{t}_u$ y $\bold{t}_v$:
$$\bold{t}_u = \big⟨\frac{∂ x}{∂ u}, \frac{∂ y}{∂ u}, \frac{∂ z}{∂ u}\big⟩\;\;\text{y}\;\; \bold{t}_v = \big⟨\frac{∂ x}{∂ v}, \frac{∂ y}{∂ v}, \frac{∂ z}{∂ v}\big⟩$$Por el material que ya hemos estudiado, sabemos que
$$Δ S_{ij} \approx ||\bold{t}_u (P_{ij}) × \bold{t}_v(P_{ij})|| Δ u Δ v$$Por lo tanto,
$$\iint_S f(x,y,z)dS \approx \lim\limits_{m,n \to \infin} \sum_{i=1}^m\sum_{j=1}^n f(P_{ij}) ||\bold{t}_u (P_{ij}) × \bold{t}_v(P_{ij})|| Δ u Δ v$$Esta aproximación se vuelve arbitrariamente cercana a $\lim\limits_{m,n \to \infin} \sum_{i=1}^m\sum_{j=1}^n f(P_{ij}) Δ S_{ij}$ a medida que aumentamos el número de piezas $S_{ij}$ dejando que $m$ y $n$ vayan al infinito. Por lo tanto, tenemos la siguiente ecuación para calcular integrales de superficie escalar:
$$\iint_S f(x,y,z)dS = \iint_D f(\bold{r}(u,v)) ||\bold{t}_u × \bold{t}_v||dA \tag{$6.19$}$$La ecuación 6.19 nos permite calcular una integral de superficie transformándola en una integral doble. Esta ecuación para integrales de superficie es análoga a la Ecuación para integrales de línea:
$$\iint_C f(x,y,z)ds = \int_a^b f(\bold{r}(t))||\bold{r}'(t)||dt$$En este caso, el vector $\bold{t}_u × \bold{t}_v$ es perpendicular a la superficie, mientras que el vector $\bold{r}'(t)$ es tangente a la curva.
Calculando una integral de superficie
Calcula la integral de superficie $\iint_S 5dS$, donde $S$ es la superficie con parametrización $\bold{r} (u, v) = ⟨u, u^2, v⟩$ para $0 \le u \le 2$ y $0 \le v \le u$.
Calculando la integral de superficie de un cilindro
Calcula la integral de superficie $\iint_S (x + y^2)dS$, donde $S$ es el cilindro $x^2 + y^2 = 4, 0 \le z \le 3$ ()
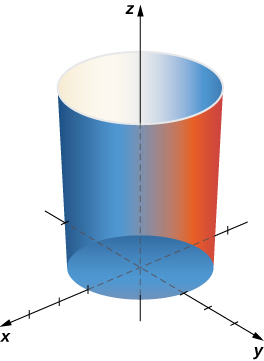
Calculando la integral de superficie de una pieza de una esfera
Calcula la integral de superficie $\iint_S f(x, y, z) dS$, donde $f (x, y, z) = z^2$ y $S$ es la superficie que consta de la pieza de esfera $x^2 + y^2 + z^2 = 4$ que se encuentra en o sobre el plano $z = 1$ y el disco que está encerrado por el plano de intersección $z = 1$ y la esfera dada ()
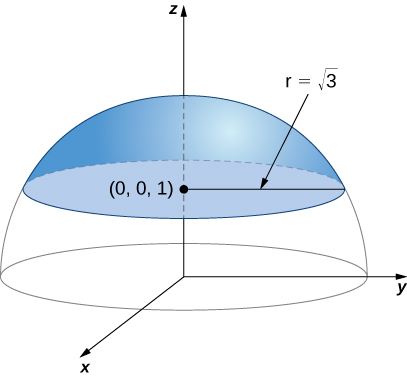
Las integrales de superficie escalar tienen varias aplicaciones del mundo real. Recuerda que las integrales de línea escalar se pueden usar para calcular la masa de un cable dada su función de densidad.
De manera similar, podemos usar integrales de superficie escalar para calcular la masa de una hoja dada su función de densidad. Si una hoja delgada de metal tiene la forma de la superficie $S$ y la densidad de la hoja en el punto $(x, y, z)$ es $ρ (x, y, z)$, entonces la masa $m$ de la hoja es $m = \int_Sρ (x , y, z) dS$
Calculando la masa de una hoja
Una hoja plana de metal tiene la forma de la superficie $z = 1 + x + 2y$ que se encuentra sobre el rectángulo $0 \le x \le 4$ y $0 \le y \le 2$. Si la densidad de la hoja está dada por $ρ (x, y, z) = x^2yz$, ¿cuál es la masa de la hoja?
Recuerda que cuando definimos una integral de línea escalar, no tuvimos que preocuparnos por la orientación de la curva de integración.
Lo mismo ocurrió con las integrales de superficies escalares: no tuvimos que preocuparnos por una "orientación" de la superficie de integración.
Por otro lado, cuando definimos integrales de líneas vectoriales, la curva de integración necesitaba una orientación. Es decir, necesitábamos la noción de curva orientada para definir una integral de línea vectorial sin ambigüedad.
De manera similar, cuando definimos una integral de superficie de un campo vectorial, necesitamos la noción de una superficie orientada. A una superficie orientada se le da una orientación "hacia arriba" o "hacia abajo" o, en el caso de superficies tales como una esfera o cilindro, una orientación "hacia afuera" o "hacia adentro".
Sea $S$ una superficie lisa. Para cualquier punto $(x, y, z)$ en $S$, podemos identificar dos vectores normales unitarios $\bold{N}$ y $-\bold{N}$. Si es posible elegir un vector normal unitario $\bold{N}$ en cada punto $(x, y, z)$ de $S$ de modo que $\bold{N}$ varíe continuamente sobre $S$, entonces $S$ es "orientable". Tal elección de vector normal unitario en cada punto da la orientación de una superficie $S$. Si piensas que el campo normal describe el flujo de agua, entonces el lado de la superficie hacia el que fluye el agua es el lado "negativo" y el lado de la superficie por la que fluye el agua, en sentido contrario, es el lado "positivo". De manera informal, una elección de orientación le da a $S$ un lado "exterior" y un lado "interior" (o un lado "hacia arriba" y un lado "hacia abajo"), al igual que una elección de orientación de una curva da a la curva "hacia adelante" y direcciones "hacia atrás".
Las superficies cerradas, como las esferas, son orientables: si elegimos el vector normal hacia afuera en cada punto de la superficie de la esfera, entonces los vectores normales unitarios varían continuamente. Esto se llama orientación positiva de la superficie cerrada (). También podríamos elegir el vector normal hacia adentro en cada punto para dar una orientación "hacia adentro", que es la orientación negativa de la superficie.
Una parte de la gráfica de cualquier función suave $z = f(x,y)$ también es orientable. Si elegimos el vector normal unitario que apunta "por encima" de la superficie en cada punto, entonces los vectores normales unitarios varían continuamente sobre la superficie.
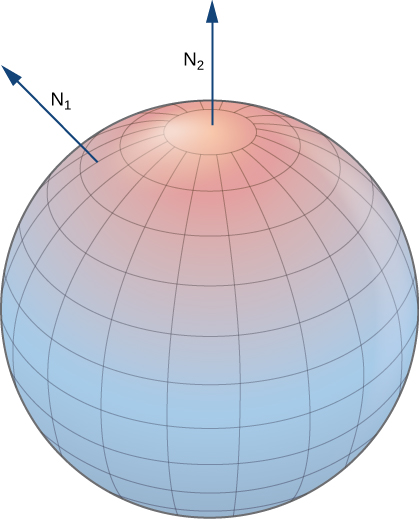
También podríamos elegir el vector normal unitario que apunta "debajo" de la superficie en cada punto. Para obtener dicha orientación, parametrizamos la gráfica de $f$ de la manera estándar: $\bold{r} (x,y) = ⟨x, y, f(x,y)⟩$, donde $x$ e $y$ varían en el dominio de $f$. Entonces, $\bold{t}_x = ⟨1, 0, f_x⟩$ y $\bold{t}_y = ⟨0, 1, f_y⟩$, y por lo tanto el producto cruzado $\bold{t}_x × \bold{t}_y$ (que es normal a la superficie en cualquier punto de la superficie) es $⟨-f_x, - f_y, 1⟩$. Dado que el componente $z$ de este vector es uno, el vector normal unitario correspondiente apunta "hacia arriba", y el lado hacia arriba de la superficie se elige como el lado "positivo".
Sea $S$ una superficie lisa orientable con parametrización $\bold{r} (u, v)$. Para cada punto $\bold{r} (a, b)$ de la superficie, los vectores $\bold{t}_u$ y $\bold{t}_v$ se encuentran en el plano tangente en ese punto. El vector $\bold{t}_u × \bold{t}_v$ es normal al plano tangente en $\bold{r} (a, b)$ y, por lo tanto, es normal a $S$ en ese punto. Por tanto, la elección del vector normal unitario
$$\bold{N} = \frac{\bold{t}_u × \bold{t}_v}{||\bold{t}_u × \bold{t}_v||}$$da una orientación de la superficie $S$.
Eligiendo una orientación
Obtén una orientación del cilindro $x^2 + y^2 = r^2, 0 \le z \le h$.
Dado que cada curva tiene una dirección "hacia adelante" y "hacia atrás" (o, en el caso de una curva cerrada, una dirección hacia la derecha y hacia la izquierda), es posible dar una orientación a cualquier curva. Por tanto, es posible pensar en cada curva como una curva orientada. Sin embargo, este no es el caso de las superficies. Algunas superficies no se pueden orientar; tales superficies se denominan no orientables. Esencialmente, una superficie se puede orientar si la superficie tiene un lado "interior" y un lado "exterior", o un lado "hacia arriba" y un lado "hacia abajo". Algunas superficies están torcidas de tal manera que no existe una noción bien definida de un lado "interno" o "externo".
El ejemplo clásico de una superficie no orientable es la banda de Möbius.
Para crear una tira de Möbius, toma una tira rectangular de papel, da una media vuelta a la hoja de papel y pega los extremos (). Debido a la media torsión de la tira, la superficie no tiene un lado "exterior" ni un lado "interior". Si imaginas colocar un vector normal en un punto de la tira y hacer que el vector viaje alrededor de la banda, entonces (debido a la media torsión) el vector apunta en la dirección opuesta cuando vuelve a su posición original. Por lo tanto, la tira realmente solo tiene un lado.

Dado que algunas superficies no son orientables, no es posible definir una integral de superficie vectorial en todas las superficies lisas por partes. Esto contrasta con las integrales de líneas vectoriales, que se pueden definir en cualquier curva suave por partes.
Con la idea de superficies orientables en su lugar, ahora estamos listos para definir una integral de superficie de un campo vectorial. La definición es análoga a la definición del flujo de un campo vectorial a lo largo de una curva plana. Recuerda que si $\bold{F}$ es un campo vectorial bidimensional y $C$ es una curva plana, entonces la definición del flujo de $\bold{F}$ a lo largo de $C$ implicó cortar $C$ en trozos pequeños, elegir un punto dentro de cada trozo y calcular $\bold{F} ⋅ \bold{N}$ en el punto (donde $\bold{N}$ es el vector normal unitario en el punto). La definición de una integral de superficie de un campo vectorial procede de la misma manera, excepto que ahora cortamos la superficie $S$ en trozos pequeños, elegimos un punto en el trozo pequeño (bidimensional) y calculamos $\bold{F} ⋅ \bold{N}$ en el punto.
Para colocar esta definición en un entorno del mundo real, sea $S$ una superficie orientada con un vector normal unitario $\bold{N}$. Sea $\bold{v}$ un campo de velocidad de un fluido que fluye a través de $S$, y supón que el fluido tiene densidad $ρ (x, y, z)$. Imagina que el fluido fluye a través de $S$, pero $S$ es completamente permeable, de modo que no obstaculiza el flujo de fluido (). El flujo másico del fluido es la tasa de flujo másico por unidad de área. El flujo de masa se mide en masa por unidad de tiempo por unidad de área. ¿Cómo podríamos calcular el flujo de masa del fluido a través de $S$?
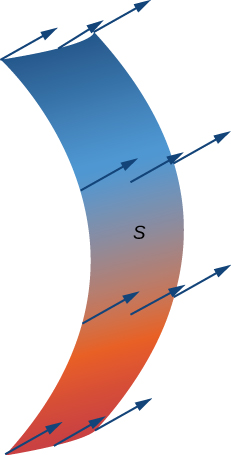
La tasa de flujo, medida en masa por unidad de tiempo por unidad de área, es $ρ\bold{N}$.
Para calcular el flujo de masa a través de $S$, corta $S$ en trozos pequeños $S_{ij}$. Si $S_{ij}$ es lo suficientemente pequeño, entonces puede aproximarse mediante un plano tangente en algún punto $P$ en $S_{ij}$. Por lo tanto, el vector normal unitario en $P$ se puede usar para aproximar $\bold{N} (x, y, z)$ en toda la pieza $S_{ij}$, porque el vector normal a un plano no cambia cuando nos movemos a través del plano. La componente del vector $ρ\bold{v}$ en $P$ en la dirección de $\bold{N}$ es $ρ\bold{v} ⋅ \bold{N}$ en $P$. Dado que $S_{ij}$ es pequeño, el producto escalar $ρ\bold{v} ⋅ \bold{N}$ cambia muy poco a medida que variamos a través de $S_{ij}$, y por lo tanto $ρ\bold{v} ⋅ \bold{N}$ puede tomarse como aproximadamente constante a través de $S_{ij}$. Para aproximar la masa de fluido por unidad de tiempo que fluye a través de $S_{ij}$ (y no solo localmente en el punto $P$), necesitamos multiplicar $(ρ\bold{v} ⋅ \bold{N}) (P)$ por el área de $S_{ij}$. Por lo tanto, la masa de fluido por unidad de tiempo que fluye a través de $S_{ij}$ en la dirección de $\bold{N}$ se puede aproximar mediante $(ρ\bold{v} ⋅ \bold{N}) Δ S_{ij}$, donde $\bold{N}, ρ$ y $\bold{v}$ se evalúan en $P$ (). Esto es análogo al flujo del campo vectorial bidimensional $\bold{F}$ a través de la curva plana $C$, en el que aproximamos el flujo a través de una pequeña parte de $C$ con la expresión $(\bold{F} ⋅ \bold{N}) Δ s$. Para aproximar el flujo de masa a través de $S$, forma la suma $\sum_{i=1}^m\sum_{j = 1}^n (ρ\bold{v} ⋅ \bold{N}) Δ S_{ij}$. A medida que las piezas $S_{ij}$ se hacen más pequeñas, la suma $\sum_{i=1}^m\sum_{j = 1}^n (ρ\bold{v} ⋅ \bold{N}) Δ S_{ij}$ se acerca arbitrariamente al flujo de masa. Por lo tanto, el flujo de masa es
$$\iint_S ρ\bold{v} ⋅ \bold{N} dS = \lim\limits_{m,n \to \infin} \sum_{i=1}^m\sum_{j = 1}^n (ρ\bold{v} ⋅ \bold{N}) Δ S_{ij}$$Ésta es una integral de superficie de un campo vectorial. Dejando que el campo vectorial $ρ\bold{v}$ sea un campo vectorial arbitrario $\bold{F}$, se obtiene la siguiente definición.
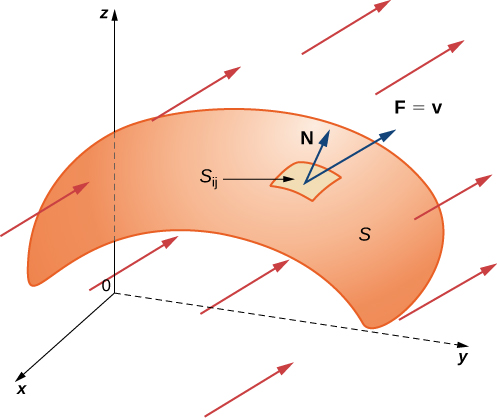
Sea $\bold{F}$ un campo vectorial continuo con un dominio que contiene una superficie orientada $S$ con un vector normal unitario $\bold{N}$. La integral de superficie de $\bold{F}$ sobre $S$ es
$$\iint_S \bold{F} ⋅ d\bold{S} = \iint_S \bold{F} ⋅ \bold{N} dS \tag{$6.20$}$$Observa el paralelo entre esta definición y la definición de integral de línea vectorial $\int_C\bold{F} ⋅ \bold{N}ds$. Una integral de superficie de un campo vectorial se define de manera similar a una integral de línea de flujo a través de una curva, excepto que el dominio de integración es una superficie (un objeto bidimensional) en lugar de una curva (un objeto unidimensional). La integral $\iint_S\bold{F} ⋅ \bold{N}dS$ se denomina flujo de $\bold{F}$ a través de $S$, al igual que la integral $\int_C\bold{F} ⋅ \bold{N}ds$ es el flujo de $\bold{F}$ a través de la curva $C$. Una integral de superficie sobre un campo vectorial también se llama integral de flujo.
Al igual que con las integrales de línea vectorial, la integral de superficie $\iint_S\bold{F} ⋅ \bold{N}dS$ es más fácil de calcular después de que se haya parametrizado la superficie $S$. Sea $\bold{r} (u, v)$ una parametrización de $S$ con dominio de parámetro $D$. Entonces, el vector normal unitario viene dado por $\bold{N} = \frac{\bold{t}_u × \bold{t}_v}{||\bold{t}_u × \bold{t}_v||}$ y, de la ecuación 6.20, obtenemos:
$$\begin{aligned} \iint_S\bold{F} ⋅ \bold{N}dS &= \iint_S\bold{F} ⋅ \frac{\bold{t}_u × \bold{t}_v}{||\bold{t}_u × \bold{t}_v||}\\ &= \iint_D\big(\bold{F}(\bold{r}(u,v)) ⋅ \frac{\bold{t}_u × \bold{t}_v}{||\bold{t}_u × \bold{t}_v||}\big)||\bold{t}_u × \bold{t}_v||dA\\ &= \iint_D\big(\bold{F}(\bold{r}(u,v)) ⋅ (\bold{t}_u × \bold{t}_v)dA \end{aligned}$$Por lo tanto, para calcular una integral de superficie sobre un campo vectorial, podemos usar la ecuación
$$\iint_S\bold{F} ⋅ \bold{N}dS = \iint_D\big(\bold{F}(\bold{r}(u,v)) ⋅ (\bold{t}_u × \bold{t}_v)dA$$
Calculando una integral de superficie
Calcula la integral de superficie $\iint_S\bold{F} ⋅ \bold{N}dS$, donde $\bold{F} = ⟨-y, x, 0⟩$ y $S$ es la superficie con parametrización $\bold{r} (u, v) = ⟨u, v^2 - u, u + v⟩, 0 \le u \lt 3, 0 \le v \le 4$.
Calculando la tasa de flujo másico
Sea $\bold{v} (x, y, z) = ⟨2x, 2y, z⟩$ representar un campo de velocidad (con unidades de metros por segundo) de un fluido con densidad constante de $80\; kg / m^3$. Sea $S$ el hemisferio $x^2 + y^2 + z^2 = 9$ con $z \ge 0$ tal que $S$ está orientado hacia afuera. Encuentre la tasa de flujo másico del fluido a través de $S$.
En el ejercicio anterior, calculamos el flujo másico, que es la tasa de flujo másico por unidad de área. Si queremos encontrar el caudal (medido en volumen por tiempo), podemos usar la integral de flujo $\iint_S\bold{v} ⋅ \bold{N}dS$, que omite la densidad. Dado que el caudal de un fluido se mide en volumen por unidad de tiempo, el caudal no tiene en cuenta la masa. Por lo tanto, tenemos la siguiente caracterización de la tasa de flujo de un fluido con velocidad $\bold{v}$ a través de una superficie $S$:
Para calcular el caudal del fluido del ejercicio anterior, simplemente eliminamos la constante de densidad, que da un caudal de $90π\; m^3 / seg$.
Tanto el flujo másico como el caudal son importantes en física e ingeniería. El flujo de masa mide cuánta masa fluye a través de una superficie; el caudal mide cuánto volumen de fluido fluye a través de una superficie.
Además de modelar el flujo de fluido, se pueden utilizar integrales de superficie para modelar el flujo de calor. Supón que la temperatura en el punto $(x, y, z)$ de un objeto es $T (x, y, z)$. Entonces, el flujo de calor es un campo vectorial proporcional al gradiente de temperatura negativo en el objeto. Para ser precisos, el flujo de calor se define como campo vectorial $\bold{F} = -k∇ T$, donde la constante $k$ es la conductividad térmica de la sustancia a partir de la cual está hecho el objeto (esta constante se determina experimentalmente). La tasa de flujo de calor a través de la superficie $S$ en el objeto está dada por la integral de flujo
$$\iint_S\bold{F} ⋅ d\bold{S} = \iint_S -k∇ T ⋅ d\bold{S}$$Terminamos este apartado con un último ejercicio y una escena interactiva de Elena E. Álvarez Sáiz, en la cual se considera: i) una superficie $S$ dada por $z=(x,y)$ que está definida sobre un rectángulo $R=[0,a]× [0,b]$; ii) una partición de $R$ en $mn$ subrectángulos, y iii) un campo $\bold{F}$ definido en cada punto de la superficie $S$.
Calculando el flujo de calor
Un cilindro sólido de hierro fundido viene dado por las desigualdades $x^2 + y^2 \le 1, 1 \le z \le 4$. La temperatura en el punto $(x, y, z)$ en una región que contiene el cilindro es $\bold{T} (x, y, z) = (x^2 + y^2)z$. Dado que la conductividad térmica del hierro fundido es $55$, encuentra el flujo de calor a través del límite del sólido si este límite está orientado hacia afuera.
Para los siguientes ejercicios, determina si las afirmaciones son verdaderas o falsas.
Para los siguientes ejercicios, busca descripciones paramétricas de las siguientes superficies.
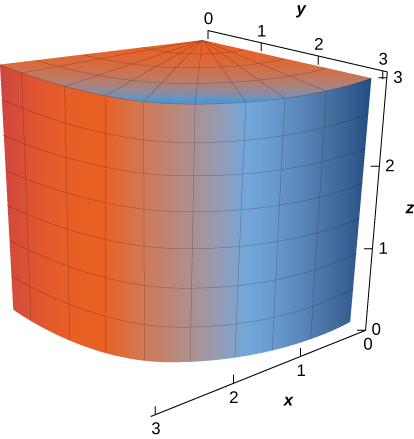
Para los siguientes ejercicios, usa un sistema de álgebra computarizada para aproximar el área de las siguientes superficies usando una descripción paramétrica de la superficie.
Para los siguientes ejercicios, sea $S$ el hemisferio $x^2 + y^2 + z^2 = 4$, con $z \ge 0$, y evalúa cada integral de superficie, en sentido antihorario.
Para los siguientes ejercicios, evalúa $\iint_S\bold{F} ⋅ \bold{N}ds$ para el campo vectorial $\bold{F}$, donde $\bold{N}$ es un vector normal hacia afuera a la superficie $S$.

Para los siguientes ejercicios, calcula la masa de la lámina homogénea que tiene la forma de la superficie dada $S$. Redondea a cuatro decimales.

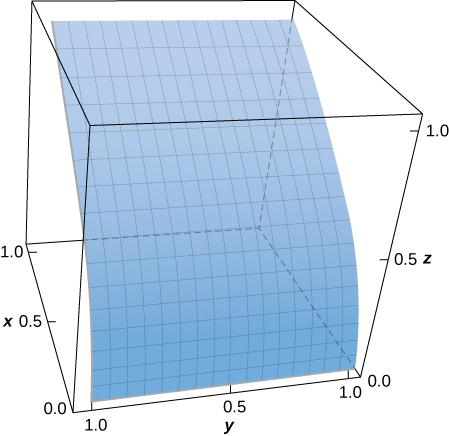

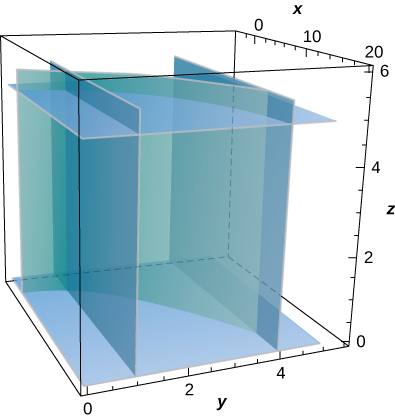
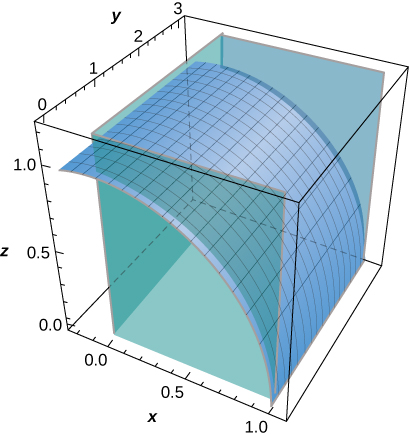

Para los siguientes ejercicios, expresa la integral de superficie como una integral doble iterada usando una proyección en $S$ en el plano $yz$.
Para los siguientes ejercicios, expresa la integral de superficie como una integral doble iterada usando una proyección en $S$ en el plano $xz$
Para los siguientes ejercicios, usa el razonamiento geométrico para evaluar las integrales de superficie dadas.
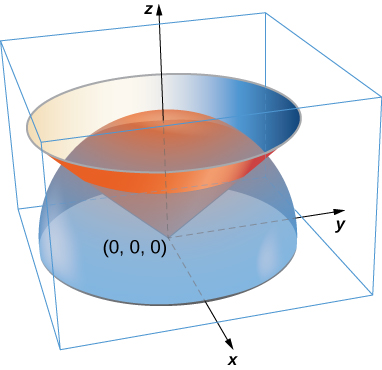
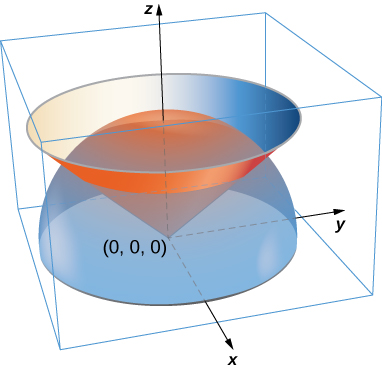
Para los siguientes ejercicios, el campo vectorial de flujo de calor para objetos conductores $\bold{F} = -k∇ T$, donde $T (x, y, z)$ es la temperatura en el objeto y $k \gt 0$ es una constante que depende del material. Encuentra el flujo exterior de $\bold{F}$ a través de las siguientes superficies $S$ para las distribuciones de temperatura dadas y supón $k = 1$.
Para los siguientes ejercicios, considera los campos radiales $\bold{F} = \frac{⟨x, y, z⟩}{ \big(x^2 + y^2 + z^2\big)^{p/2}} = \frac{\bold{r}}{ | \bold{r} |^p}$, donde $p $es un número real. Sea $S$ formado por esferas $A$ y $B$ centradas en el origen con radios $0 \lt a \lt b$. El flujo total hacia afuera a través de $S$ consiste en el flujo hacia afuera a través de la esfera externa $B$ menos el flujo hacia $S$ a través de la esfera interna $A$.

En este apartado, estudiaremos el teorema de Stokes, una generalización de dimensiones superiores del teorema de Green. Este teorema, como el Teorema fundamental para Integrales de Línea y el teorema de Green, es una generalización del Teorema Fundamental del Cálculo a dimensiones superiores. El teorema de Stokes relaciona una integral de superficie vectorial sobre la superficie $S$ en el espacio con una integral de línea alrededor del límite de $S$. Por lo tanto, al igual que los teoremas anteriores, el teorema de Stokes se puede usar para reducir una integral sobre un objeto geométrico $S$ a una integral sobre el límite de $S$.
Además de permitirnos transformar entre integrales de línea e integrales de superficie, el teorema de Stokes conecta los conceptos de rotación y circulación. Además, el teorema tiene aplicaciones en mecánica de fluidos y en el electromagnetismo. Usamos el teorema de Stokes para deducir la ley de Faraday, un resultado importante que involucra campos eléctricos.
El teorema de Stokes dice que podemos calcular el flujo del rotacional $\bold{F}$ a través de la superficie $S$ conociendo información solo sobre los valores de $\bold{F}$ a lo largo del límite de $S$. A la inversa, podemos calcular la integral de línea del campo vectorial $\bold{F}$ a lo largo del límite de la superficie $S$ transformando a una integral doble del rotacional de $\bold{F}$ sobre $S$.
Sea $S$ una superficie lisa orientada con un vector normal unitario $\bold{N}$. Además, supón que el límite de $S$ es una curva cerrada simple $C$.
La orientación de $S$ induce la orientación positiva de $C$ si, mientras camina en la dirección positiva alrededor de $C$ con su cabeza apuntando en la dirección de $\bold{N}$, la superficie siempre está a su izquierda. Con esta definición en su lugar, podemos enunciar el teorema de Stokes.
Supón que la superficie $S$ es una región plana en el plano $xy$ con orientación hacia arriba. Entonces, el vector normal unitario es $\bold{k}$ y la integral de superficie $\iint_S rot \bold{F} ⋅ d\bold{S}$ es en realidad la integral doble $\iint_S rot \bold{F} ⋅ \bold{k}dA$. En este caso especial, el teorema de Stokes da $\int_C\bold{F} ⋅ d\bold{r} = \iint_S rot \bold{F} ⋅ \bold{k}dA$. Sin embargo, esta es la forma de flujo del teorema de Green, que nos muestra que el teorema de Green es un caso especial del teorema de Stokes. El teorema de Green solo puede manejar superficies en un plano, pero el teorema de Stokes puede manejar superficies en un plano o en el espacio.
La prueba completa del teorema de Stokes está más allá del alcance de este texto.
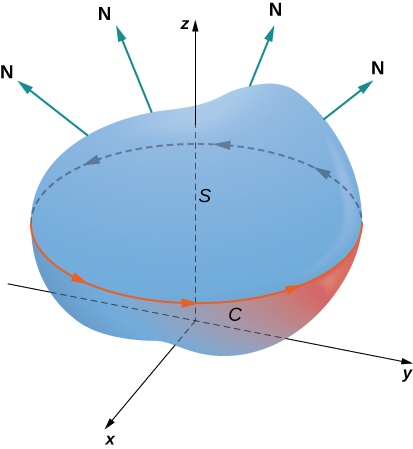
Observamos una explicación intuitiva de la verdad del teorema y luego vemos la prueba del teorema en el caso especial de que la superficie $S$ es una porción de una gráfica de una función, y $S$, el límite de $S$ y $\bold{F}$ son bastante mansos.
Primero, miramos una demostración informal del teorema. Esta demostración no es rigurosa, pero está destinada a dar una idea general de por qué el teorema es verdadero. Sea $S$ una superficie y sea $D$ una pequeña parte de la superficie para que $D$ no comparta ningún punto con el límite de S. Elegimos que $D$ sea lo suficientemente pequeño como para que pueda aproximarse mediante un cuadrado orientado $E$.
Sea $D$ tal que herede su orientación de $S$ y dé a $E$ la misma orientación. Este cuadrado tiene cuatro lados; denotados como $E_l, E_r, E_u$ y $E_d$ para los lados izquierdo, derecho, arriba y abajo, respectivamente. En el cuadrado, podemos usar la forma de flujo del teorema de Green:
$$\int_{E_l + E_d + E_r + E_u}\bold{F} ⋅ d\bold{r} = \iint_E rot \bold{F} ⋅ \bold{N}dS = \iint_E rot \bold{F} ⋅ d\bold{S}$$Para aproximar el flujo sobre toda la superficie, agregamos los valores del flujo en los cuadrados pequeños que se aproximan a los pequeños pedazos de la superficie ().

Según el teorema de Green, el flujo a través de cada cuadrado aproximado es una integral de línea sobre su límite. Sea $F$ un cuadrado aproximado con una orientación heredada de $S$ y con un lado derecho $E_l$ (entonces $F$ está a la izquierda de $E$).
Sea $F_r$ el lado derecho de $F$; entonces, $E_l = -F_r$. En otras palabras, el lado derecho de $F$ es la misma curva que el lado izquierdo de $E$, simplemente orientado en la dirección opuesta. Por lo tanto,
$$\int_{E_l}\bold{F} ⋅ d\bold{r} = -\int_{F_r}\bold{F} ⋅ d\bold{r}$$A medida que sumamos todos los flujos sobre todos los cuadrados que se aproximan a la superficie $S$, las integrales de línea $int_{E_l}\bold{F} ⋅ d\bold{r}$ y $\int_{F_r}\bold{F} ⋅ d\bold{r}$ se cancelan entre sí. Lo mismo ocurre con las integrales de línea sobre los otros tres lados de $E$. Estas tres integrales de línea se cancelan con la integral de línea del lado inferior del cuadrado sobre $E$, la integral de línea sobre el lado izquierdo del cuadrado a la derecha de $E$, y la integral de línea sobre el lado superior del cuadrado debajo de $E$ ().

Después de que ocurra toda esta cancelación en todos los cuadrados aproximados, las únicas integrales de línea que sobreviven son las integrales de línea sobre los lados que se aproximan al límite de S. Por lo tanto, la suma de todos los flujos (que, según el teorema de Green, es la suma de todas las integrales de línea alrededor de los límites de los cuadrados aproximados) se puede aproximar mediante una integral de línea sobre el límite de $S$. En el límite, cuando las áreas de los cuadrados aproximados van a cero, esta aproximación se acerca arbitrariamente al flujo.
Veamos ahora una demostración rigurosa del teorema en el caso especial de que $S$ es la gráfica de la función $z = f(x,y)$, donde $x$ e $y$ varían en una región $D$ limitada y simplemente conectada de área finita ().
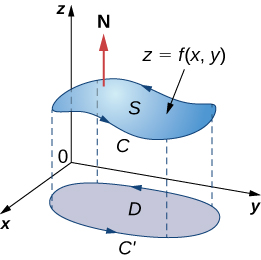
Además, supón que $f$ tiene derivadas parciales continuas de segundo orden. Sea $C$ el límite de $S$ y $C'$ el límite de $D$.
Entonces, $D$ es la "sombra" de $S$ en el plano y $C'$ es la "sombra" de $C$. Supón que $S$ está orientado hacia arriba. La orientación en sentido antihorario de $C$ es positiva, al igual que la orientación en sentido antihorario de $C'$. Sea $\bold{F} (x, y, z) = ⟨P, Q, R⟩$ un campo vectorial con funciones componentes que tienen derivadas parciales continuas.
Tomamos la parametrización estándar de $S: x = x, y = y, z = g (x,y)$. Los vectores tangentes son $\bold{t}_x = ⟨1, 0, g_x⟩$ y $\bold{t}_y = ⟨0, 1, g_y⟩$, y por lo tanto, $\bold{t}_x ⋅ \bold{t}_y = ⟨-g_x, -g_y, 1⟩$. Por la ecuación 6.19,
$$\iint_S rot \bold{F} ⋅ d\bold{S} = \iint_D [-(R_y - Q_z)z_x -(P_z - R_x)z_y + (Q_x - P_y)] dA$$ donde todas las derivadas parciales se evalúan en $x, y, g (x,y)$, lo que hace que el integrando dependen de $x$ e $y$ solamente. Supón que $⟨x (t), y (t)⟩, a \le t \le b$ es una parametrización de $C'$. Entonces, una parametrización de $C$ es $⟨x (t), y (t), gx (t), y (t)⟩, a \le t \le b$. Armados con estas parametrizaciones, la regla de la cadena y el teorema de Green, y teniendo en cuenta que $P, Q$ y $R$ son todas funciones de $x$ e $y$, podemos evaluar la integral de línea $\int_C\bold{F} ⋅ d\bold{r}$: $$\begin{aligned} \int_C\bold{F} ⋅ d\bold{r} &= \int_a^b (Px'(t) + Qy'(t) + Rz'(t))dt\\ &= \int_a^b \bigg[Px'(t) + Qy'(t) + R\bigg(\frac{∂ z}{∂ x}\frac{∂ x}{∂ t} + \frac{∂ z}{∂ y}\frac{∂ y}{∂ t}\bigg)\bigg]dt\\ &= \int_a^b \bigg[\bigg(P+R\frac{∂ z}{∂ x}\bigg)x'(t) + \bigg(Q+R\frac{∂ z}{∂ y}\bigg)y'(t)\bigg]dt\\ &= \int_{C'} \bigg[\bigg(P+R\frac{∂ z}{∂ x}\bigg)dx + \bigg(Q+R\frac{∂ z}{∂ y}\bigg)dy\bigg]\\ \end{aligned}$$Según el teorema de Clairaut, $\frac{∂^2 z}{∂ x∂ y} y = \frac{∂^2 z}{∂ y∂ x}$. Por lo tanto, cuatro de los términos desaparecen de esta integral doble y nos quedamos con
$$\iint_D \big[-(R_y - Q_z\big)z_x - \big(P_z - R_x\big)z_y + \big(Q_x - P_y\big)\big] dA$$que es igual a $\iint_S rot \bold{F} ⋅ d\bold{S}$.
Hemos demostrado que el teorema de Stokes es verdadero en el caso de una función con un dominio que es una región simplemente conectada de área finita. Podemos confirmar rápidamente este teorema para otro caso importante: cuando el campo vectorial $\bold{F}$ es conservativos. Si $\bold{F}$ es conservativo, el rotacional de $\bold{F}$ es cero, entonces $\iint_S rot \bold{F} ⋅ d\bold{S} = 0$. Dado que el límite de $S$ es una curva cerrada, $\int_C\bold{F} ⋅ d\bold{r}$ también es cero.
Verificando el teorema de Stokes para un caso específico
Verifique que el teorema de Stokes sea verdadero para el campo vectorial $\bold{F} (x, y, z) = ⟨y, 2z, x^2⟩$ y la superficie $S$, donde $S$ es el parabolide $z = 4 - x^2- y^2$.

El teorema de Stokes se transforma entre la integral de flujo de la superficie $S$ a una integral de línea alrededor del límite de $S$. Por lo tanto, el teorema nos permite calcular integrales de superficie o integrales de línea que normalmente serían bastante difíciles al transformar la integral de línea en una integral de superficie o viceversa. Ahora estudiaremos algunos ejemplos de cada tipo de transformación.
Calculando una integral de superficie
Calcula la integral de superficie $\iint_S rot\;\bold{F} ⋅ d\bold{S}$, donde $S$ es la superficie, orientada hacia afuera, en la y $\bold{F} = ⟨z, 2xy, x + y⟩$.
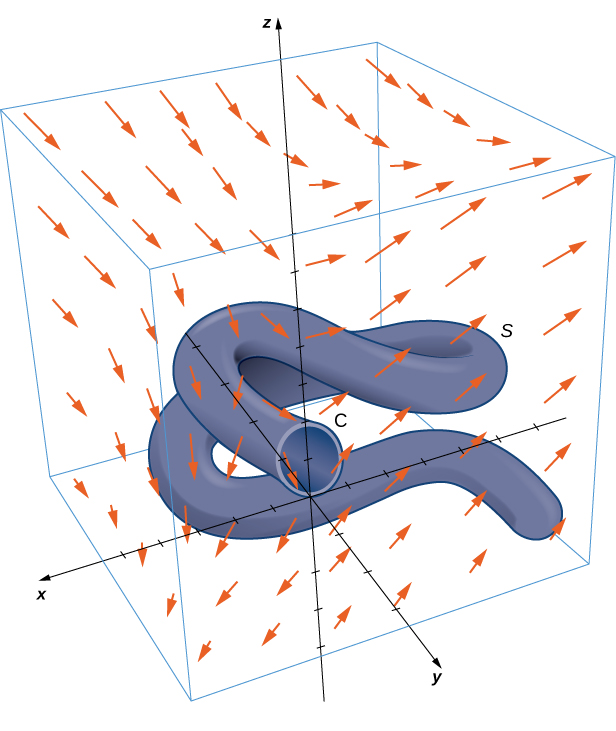
Una consecuencia asombrosa del teorema de Stokes es que si $S'$ es cualquier otra superficie lisa con el límite $C$ y la misma orientación que $S$, entonces $\iint_S rot\;\bold{F} ⋅ d\bold{S} = \int_C\bold{F} ⋅ d\bold{r} = 0$ porque el teorema de Stokes dice que la integral de la superficie depende de la línea integral alrededor del límite solamente.
En el ejercicio anterior, calculamos una integral de superficie simplemente usando información sobre el límite de la superficie. En general, sean $S_1$ y $S_2$ superficies lisas con el mismo límite $C$ y la misma orientación. Según el teorema de Stokes,
$$\iint_{S_1} rot\;\bold{F} ⋅ d\bold{S} = \int_C\bold{F} ⋅ d\bold{r} = \iint_{S_2} rot\;\bold{F} ⋅ d\bold{S} \tag{$6.23$}$$Por lo tanto, si $\iint_{S_1} rot\;\bold{F} ⋅ d\bold{S}$ es difícil de calcular pero $\iint_{S_2} rot\;\bold{F} ⋅ d\bold{S}$ es fácil de calcular, el teorema de Stokes nos permite calcular la integral de superficie más fácil. En el ejercicio anterior, podríamos haber calculado $\iint_{S} rot\;\bold{F} ⋅ d\bold{S}$ calculando $\iint_{S'} rot\;\bold{F} ⋅ d\bold{S}$, donde $S'$ es el disco encerrado por la curva límite $C$ (una superficie mucho más simple con la que trabajar).
La ecuación 6.23 muestra que las integrales de flujo de los campos vectoriales rotacionales son independientes de la superficie de la misma manera que las integrales de línea de los campos gradiente son independientes de la trayectoria. Recuerda que si $\bold{F}$ es un campo vectorial conservativo bidimensional definido en un dominio simplemente conectado, $f$ es una función potencial para $\bold{F}$, y $C$ es una curva en el dominio de $\bold{F}$, entonces $int_C\bold{F} ⋅ d\bold{r}$ depende solo de los puntos finales de $C$ Por lo tanto, si $C'$ es cualquier otra curva con el mismo punto inicial y final que $C$ (es decir, $C'$ tiene la misma orientación que $C$), entonces $\int_C\bold{F} ⋅ d\bold{r} = int_{C'}\bold{F} ⋅ d\bold{r}$.
En otras palabras, el valor de la integral depende únicamente del límite de la trayectoria; realmente no depende de la trayectoria en sí.
De manera análoga, supón que $S$ y $S'$ son superficies con el mismo límite y la misma orientación, y supón que $\bold{G}$ es un campo vectorial tridimensional que se puede escribir como el rotacional de otro campo vectorial $\bold{F}$ (de modo que $\bold{F}$ es como un "campo potencial" de $\bold{G}$).
Por la ecuación 6.23,
$$\iint_S\bold{G} ⋅ d\bold{S} = \iint_{S} rot\;\bold{F} ⋅ d\bold{S} = \int_C\bold{F} ⋅ d\bold{r} = \iint_{S'} rot\;\bold{F} ⋅ d\bold{S} = \iint_{S'}\bold{G} ⋅ d\bold{S}$$Por lo tanto, la integral de flujo de $\bold{G}$ no depende de la superficie, solo del límite de la superficie. Las integrales de flujo de campos vectoriales que se pueden escribir como el rotacional de un campo vectorial son independientes de la superficie de la misma manera que las integrales de línea de campos vectoriales que se pueden escribir como el gradiente de una función escalar son independientes de la trayectoria.
Calculando una integral de línea
Calcula la integral de línea $\int_C\bold{F} ⋅ d\bold{r}$, donde $\bold{F} = ⟨xy, x^2 + y^2 + z^2, yz⟩$ y $C$ es el límite del paralelogramo con vértices $(0, 0, 1), (0, 1, 0), ( 2, 0, -1)$ y $(2, 1, -2)$.
Además de transformar entre integrales de línea e integrales de flujo, el teorema de Stokes se puede utilizar para justificar la interpretación física del rotacional que hemos aprendido. Aquí investigaremos la relación entre el rotacional y la circulación, y usaremos el teorema de Stokes para enunciar la ley de Faraday, una ley importante en electricidad y magnetismo que relaciona el rotacional de un campo eléctrico con la tasa de cambio de un campo magnético.
Recuerda que si $C$ es una curva cerrada y $\bold{F}$ es un campo vectorial definido en $C$, entonces la circulación de $\bold{F}$ alrededor de $C$ es integral de línea $\int_C\bold{F} ⋅ d\bold{r}$. Si $\bold{F}$ representa el campo de velocidad de un fluido en el espacio, entonces la circulación mide la tendencia del fluido a moverse en la dirección de $C$.
Sea $\bold{F}$ un campo vectorial continuo y sea $D_r$ un pequeño disco de radio $r$ con centro $P_0$ (). Si $D_r$ es lo suficientemente pequeño, entonces $(rot\;\bold{F}) (P) \approx (rot\;\bold{F}) (P_0)$ para todos los puntos $P$ en $D_r$ porque el rotacional es continuo. Sea $C_r$ el círculo límite de $D_r$. Por el teorema de Stokes,
$$\int_{C_r}\bold{F} ⋅ d\bold{r} = \iint_{D_r} rot\;\bold{F} ⋅ \bold{N}dS \approx \iint_{D_r} (rot\;\bold{F})(P_0) ⋅ \bold{N}(P_0)dS$$La cantidad $(rot\;\bold{F})(P_0) ⋅ \bold{N}(P_0)$ es constante, y por lo tanto
$$\iint_{D_r} (rot\;\bold{F})(P_0) ⋅ \bold{N}(P_0)dS = π r^2\big[(rot\;\bold{F})(P_0) ⋅ \bold{N}(P_0)\big]$$Así

y la aproximación se acerca arbitrariamente a medida que el radio se reduce a cero. Por tanto, el teorema de Stokes implica que
$$(rot\;\bold{F})(P_0) ⋅ \bold{N}(P_0) = \lim\limits_{r \to 0^{+}} \frac{1}{π r^2}\int_{C_r} \bold{F} ⋅ d\bold{r}$$Esta ecuación relaciona el rotacional de un campo vectorial con la circulación. Dado que el área del disco es $π r^2$, esta ecuación dice que podemos ver el rotacional (en el límite) como la circulación por unidad de área.
Recuerda que si $\bold{F}$ es el campo de velocidad de un fluido, entonces la circulación $\oint_{C_r}\bold{F} ⋅ d\bold{r} = \oint_{C_r}\bold{F} ⋅ \bold{T}ds$ es una medida de la tendencia del fluido a moverse alrededor de $C_r$. La razón de esto es que $\bold{F} ⋅ \bold{T}$ es un componente de $\bold{F}$ en la dirección de $\bold{T}$ , y cuanto más cerca está la dirección de $\bold{F}$ de $\bold{T}$ , mayor es el valor de $\bold{F} ⋅ \bold{T}$ (recuerda que si $\bold{a}$ y $\bold{b}$ son vectores y $\bold{b}$ es fijo, entonces el producto escalar $\bold{a} ⋅ \bold{b}$ es máximo cuando a apunta en la misma dirección que $\bold{b}$).
Por lo tanto, si $\bold{F}$ es el campo de velocidad de un fluido, entonces el rotacional $\bold{F} ⋅ \bold{N}$ es una medida de cómo el fluido gira alrededor del eje $\bold{N}$. El efecto del rotacional es mayor alrededor del eje que apunta en la dirección de $\bold{N}$, porque en este casa $rot\; \bold{F} ⋅ \bold{N}$ es lo más grande posible.
Para ver este efecto de una manera más concreta, imagina colocar una pequeña rueda de paletas en el punto $P_0$ (). La rueda de paletas alcanza su velocidad máxima cuando el eje de la rueda apunta en la dirección del rotacional $\bold{F}$. Esto justifica la interpretación del rotacional que hemos aprendido: el rotacional es una medida de la rotación en el campo vectorial alrededor del eje que apunta en la dirección del vector normal $\bold{N}$, y el teorema de Stokes justifica esta interpretación
Ahora que hemos aprendido sobre el teorema de Stokes, podemos discutir aplicaciones en el área del electromagnetismo. En particular, examinamos cómo podemos usar el teorema de Stokes para transformar entre dos formas equivalentes de la ley de Faraday. Antes de enunciar las dos formas de la ley de Faraday, necesitamos algunos antecedentes de terminología.

Sea $C$ una curva cerrada que modela un cable delgado. En el contexto de los campos eléctricos, el cable puede moverse con el tiempo, por lo que escribimos $C (t)$ para representar el cable. En un momento $t$ dado, la curva $C (t)$ puede ser diferente de la curva $C$ original debido al movimiento del alambre, pero asumimos que $C (t)$ es una curva cerrada para todos los tiempos $t$. Sea $D (t)$ una superficie con $C (t)$ como su límite y orienta $C (t)$ de modo que $D (t)$ tenga orientación positiva. Supón que $C (t)$ está en un campo magnético $\bold{B} (t)$ que también puede cambiar con el tiempo. En otras palabras, $\bold{B}$ tiene la forma
$$\bold{B}(x, y, z) = ⟨P(x, y, z), Q(x, y, z), R(x, y, z)⟩$$donde $P, Q$ y $R$ pueden variar continuamente a lo largo del tiempo. Podemos producir corriente a lo largo del cable cambiando el campo $\bold{B} (t)$ (esto es una consecuencia de la ley de Ampere).
El flujo $ϕ (t) = \iint_{D (t)} \bold{B} (t) ⋅ d\bold{S}$ crea un campo eléctrico $\bold{E} (t)$ que funciona. La forma integral de la ley de Faraday establece que
$\text{Trabajo } = \int_{C(t)} \bold{E}(t) ⋅ d\bold{r} = -\frac{∂ ϕ}{∂ t}$$En otras palabras, el trabajo realizado por $\bold{E}$ es la integral de línea alrededor del límite, que también es igual a la tasa de cambio del flujo con respecto al tiempo. La forma diferencial de la ley de Faraday establece que
$$rot\; \bold{E} = -\frac{∂ \bold{B}}{∂ t}$$Usando el teorema de Stokes, podemos demostrar que la forma diferencial de la ley de Faraday es una consecuencia de la forma integral. Por el teorema de Stokes, podemos convertir la integral de línea en la forma integral en integral de superficie
$$ -\frac{∂ ϕ}{∂ t} = \int_{C(t)} \bold{E(t)} ⋅ d\bold{r} = \iint_{D(t)} rot\; \bold{E}(t) ⋅ d\bold{S}$$Dado que $ϕ (t) = \iint_{D (t)}\bold{B} (t) ⋅ s\bold{S}$, siempre que la integración de la superficie no varíe con el tiempo también tenemos
$$-\frac{∂ ϕ}{∂ t} = \iint_{D(t)} -\frac{∂ \bold{B}}{∂ t} ⋅ \bold{S}$$Por lo tanto
$$\iint_{D(t)} -\frac{∂ \bold{B}}{∂ t} ⋅ \bold{S} = \iint_{D(t)} rot\;\bold{E} ⋅ d\bold{S}$$Para derivar la forma diferencial de la ley de Faraday, nos gustaría concluir que $rot\;\bold{E} = -\frac{∂ \bold{B}}{∂ t}$. En general, la ecuación
$$\iint_{D(t)} -\frac{∂ \bold{B}}{∂ t} ⋅ \bold{S} = \iint_{D(t)} rot\;\bold{E} ⋅ d\bold{S}$$no es suficiente para concluir que $rot\;\bold{E} = -\frac{∂ \bold{B}}{∂ t}$. Los símbolos integrales no se "cancelan" simplemente, dejando la igualdad de los integrandos. Para ver por qué el símbolo integral no solo se cancela en general, considera las dos integrales de una sola variable $\int_0^1xdx$ y $\int_0^1f (x) dx$, donde
$$f(x) = \begin{cases} 1, & 0\le x \le 1/2 \\ 0, & 1/2 \le x \le 1 \end{cases}$$Ambas integrales son iguales a $\frac12$, por lo que $\int_0^1xdx = \int_0^1f (x) dx$. Sin embargo, $x\;≠\; f(x)$. De manera análoga, con nuestra ecuación $\iint_{D(t)} -\frac{∂ \bold{B}}{∂ t} ⋅ \bold{S} = \iint_{D(t)} rot\;\bold{E} ⋅ d\bold{S}$, no podemos simplemente concluir que curl $\bold{E} = -\frac{∂ \bold{B}}{∂ t}$ solo porque sus integrales son iguales. Sin embargo, en nuestro contexto, la ecuación $\iint_{D(t)} -\frac{∂ \bold{B}}{∂ t} ⋅ \bold{S} = \iint_{D(t)} rot\;\bold{E} ⋅ d\bold{S}$ es verdadera para cualquier región, por pequeña que sea (esto contrasta con las integrales de una sola variable que acabamos de discutir ). Si $\bold{F}$ y $\bold{G}$ son campos vectoriales tridimensionales tales que $\iint_s\bold{F} ⋅ d\bold{S} = \iint_s\bold{G} ⋅ s\bold{S}$ para cualquier superficie $S$, entonces es posible mostrar que $\bold{F} = \bold{G}$ reduciendo el área de $S$ a cero tomando un límite (el menor es el área de $S$, más cercano es el valor de $\iint_s\bold{F} ⋅ d\bold{S}$ al valor de $\bold{F}$ en un punto dentro de $S$). Por lo tanto, podemos hacer que el área $D (t)$ se reduzca a cero tomando un límite y obteniendo la forma diferencial de la ley de Faraday:
En el contexto de los campos eléctricos, la curvatura del campo eléctrico se puede interpretar como el negativo de la tasa de cambio del campo magnético correspondiente con respecto al tiempo.
Usando la Ley de Faraday
Calcula la curva del campo eléctrico $\bold{E}$ si el campo magnético correspondiente es un campo constante $\bold{B} (t) = ⟨1, -4, 2⟩$.
Para terminar este apartado, presentamos una escena interactiva del Teorema de Stokes, diseñada por Andreas Steiger. En este escena se representa el campo vectorial y la circulación calculada con el rotacional de las funciones vectoriales:
$$\begin{aligned} \bold{v}(x,y,z) &= ⟨z,x,y⟩\\ \bold{v}(x,y,z) &= ⟨-x^3-x+z, -y^3-2y+x, -z^3-2z+y ⟩\\ \bold{v}(x,y,z) &= ⟨-y,x,0⟩ \end{aligned}$$Se puede seleccionar la representación gráfica del campo vectorial (global) o el rotacional (integral).
Observa que Steiger usa una notación diferente a la que hemos estado trabajando, pero es fácil de interpretar.
Para los siguientes ejercicios, sin usar el teorema de Stokes, calcula directamente tanto el flujo del rotacional $\bold{F} ⋅ \bold{N}$ sobre la superficie dada como la integral de circulación alrededor de su límite, asumiendo que todos los límites están orientados en el sentido de las agujas del reloj, visto desde arriba.
Para los siguientes ejercicios, usa el teorema de Stokes para evaluar $\iint_S (rot\; \bold{F} ⋅ \bold{N}) dS$ para los campos vectoriales y la superficie.



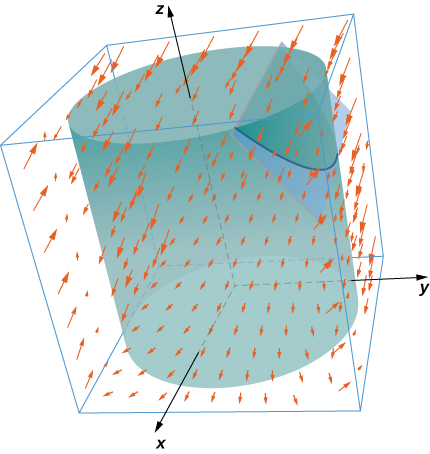
Para los siguientes ejercicios de aplicación, el objetivo es evaluar $A = \iint_S (∇× \bold{F}) ⋅ \bold{n}dS$, donde $\bold{F} = ⟨xz, -xz, xy⟩$ y $S$ es la mitad superior del elipsoide $x^2 + y^2 + 8z^2 = 1$, donde $z\ge 0$.

Para los siguientes ejercicios, sea $S$ el disco encerrado por la curva $C: \bold{r}(t) = ⟨cos\;ϕ cos\; t, sen\;t, sen\;ϕ cos\; t⟩$, para $0 \le t \le 2π$, donde $0 \le ϕ \le \frac{π}{2}$ es un ángulo fijo.
Para los siguientes ejercicios, usa el teorema de Stokes para encontrar la circulación de los siguientes campos vectoriales alrededor de cualquier curva cerrada simple $C$.
Hemos examinado varias versiones del Teorema Fundamental del Cálculo en dimensiones superiores que relacionan la integral alrededor de un límite orientado de un dominio con una "derivada" de esa entidad en el dominio orientado. En este apartado plantearemos el teorema de la divergencia, que es el teorema final de este tipo que estudiaremos. El teorema de la divergencia tiene muchos usos en física; en particular, el teorema de la divergencia se utiliza en el campo de las ecuaciones diferenciales parciales para derivar ecuaciones que modelan el flujo de calor y la conservación de la masa. Usaremos el teorema para calcular integrales de flujo y aplicarlo a campos electrostáticos.
Antes de examinar el teorema de la divergencia, es útil comenzar con una descripción general de las versiones del Teorema Fundamental del Cálculo que hemos discutido:
Este teorema relaciona la integral de la derivada $f'$ sobre el segmento de línea $[a, b]$ a lo largo del eje $x$ con una diferencia de $f$ evaluada en la frontera.
donde $P_0$ es el punto inicial de $C$ y $P_1$ es el punto terminal de $C$. El Teorema Fundamental para Integrales de Línea permite que la trayectoria $C$ sea una ruta en un plano o en el espacio, no solo un segmento de línea en el eje $x$. Si pensamos en el gradiente como una derivada, entonces este teorema relaciona una integral de la derivada $∇ f$ sobre la trayectoria $C$ con una diferencia de $f$ evaluada en el límite de $C$.
Dado que $P_x + Q_y = div \;\bold{F}$ y la divergencia es una especie de derivada, la forma de flujo del teorema de Green relaciona la integral de la derivada $div\;F$ sobre la región plana $D$ con una integral de $\bold{F}$ sobre el límite de $D$
Si pensamos en la curvatura como una especie de derivada, entonces el teorema de Stokes relaciona la integral de la derivada $rot\;\bold{F}$ sobre la superficie $S$ (no necesariamente plana) con una integral de $\bold{F}$ sobre el límite de $S$.
El teorema de la divergencia sigue el patrón general de estos otros teoremas.
Si pensamos en la divergencia como una especie de derivada, entonces el Teorema de la Divergencia relaciona una integral triple de la derivada $div\;\bold{F}$ sobre un sólido con una integral de flujo de $\bold{F}$ sobre el límite del sólido. Más específicamente, el teorema de la divergencia relaciona una integral de flujo del campo vectorial $\bold{F}$ sobre una superficie cerrada $S$ con una integral triple de la divergencia de $\bold{F}$ sobre el sólido encerrado por $S$.
Teorema de la Divergencia o de Gauss
Sea $S$ una superficie cerrada, lisa y a trozos que encierra al sólido $E$ en el espacio. Supón que $S$ está orientado hacia afuera y sea $\bold{F}$ un campo vectorial con derivadas parciales continuas en una región abierta que contiene $E$ (). Luego
$$\iiint_E div\:\bold{F} dV = \iint_S \bold{F} ⋅ d\bold{S} \tag{$6.24$}$$Recuerda que la forma de flujo del teorema de Green establece que $\iint_D div\;\bold{F}dA = \int_C \bold{F} ⋅ \bold{N}ds$. Por tanto, el teorema de la divergencia es una versión del teorema de Green en una dimensión superior.
La prueba del teorema de la divergencia está más allá del alcance de este texto. Sin embargo, observamos una demostración informal que da una idea general de por qué el teorema es verdadero, pero no prueba el teorema con todo rigor. Esta explicación sigue la explicación informal dada de por qué el teorema de Stokes es verdadero.
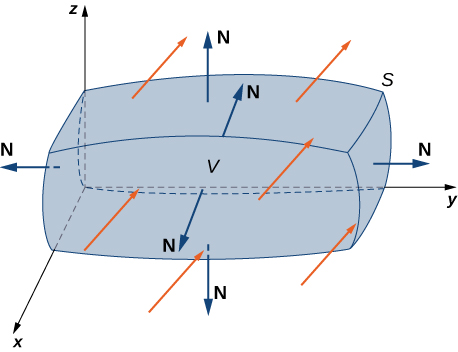
Sea $B$ una caja pequeña con lados paralelos a los planos de coordenadas dentro de $E$ (). Deja que el centro de $B$ tenga coordenadas $(x, y, z)$ y supón que las longitudes de los bordes son $Δ x, Δ y$ y $Δ z$ ( (b)). El vector normal que sale de la parte superior de la caja es $\bold{k}$ y el vector normal que sale de la parte inferior de la caja es $-\bold{k}$. El producto escalar de $\bold{F} = ⟨P, Q, R⟩$ con $\bold{k}$ es $R$ y el producto escalar con $-\bold{k}$ es $-R$. El área de la parte superior de la caja (y la parte inferior de la caja) $Δ S$ es $Δ xΔ y$.
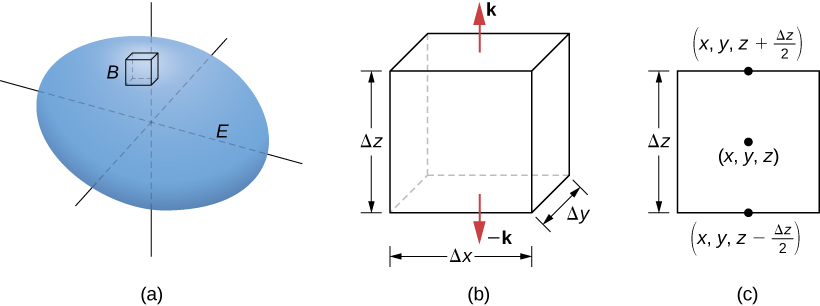
El flujo que sale de la parte superior de la caja se puede aproximar mediante $R\big(x, y, z + \frac{Δ z}{2}\big)Δ xΔ y$ ((c)) y el flujo que sale de la parte inferior de la caja es $-R\big(x, y, z - \frac{Δ z}{2}\big)Δ xΔ y$. Si denotamos la diferencia entre estos valores como $Δ R$, entonces el flujo neto en la dirección vertical puede aproximarse por $Δ RΔ xΔ y$. Sin embargo
$$Δ RΔ xΔ y\bigg(\frac{Δ R}{Δ z}\bigg)Δ xΔ yΔ z \approx \bigg(\frac{∂ R}{∂ z}Δ V\bigg)$$Por lo tanto, el flujo neto en la dirección vertical se puede aproximar mediante $\big(\frac{∂ R}{∂ z}Δ V\big)$. De forma similar, el flujo neto en la dirección $x$ se puede aproximar mediante $\big(\frac{∂ P}{∂ x}Δ V\big)$ y el flujo neto en la dirección $y$ se puede aproximar mediante $\big(\frac{∂ Q}{∂ y}Δ V\big)$.
Sumar los flujos en las tres direcciones da una aproximación del flujo total fuera de la caja:
$$\text{flujo total } = \bigg(\frac{∂ P}{∂ x} + \frac{∂ Q}{∂ y} + \frac{∂ R}{∂ z}\bigg)Δ V = div\;\bold{F}Δ V$$Esta aproximación se vuelve arbitrariamente cercana al valor del flujo total cuando el volumen de la caja se reduce a cero.
La suma de $div\;\bold{F}Δ V$ sobre todas las cajas pequeñas que se aproximan a $E$ es aproximadamente $\iiint_E div\;\bold{F}dV$. Por otro lado, la suma de $div\;\bold{F}Δ V$ sobre todas las cajas pequeñas que se aproximan a $E$ es la suma de los flujos sobre todas estas cajas. Al igual que en la demostración informal del teorema de Stokes, la adición de estos flujos sobre todas las casillas da como resultado la cancelación de muchos términos.
Si una caja aproximada comparte una cara con otra caja aproximada, entonces el flujo sobre una cara es el negativo del flujo sobre la cara compartida de la caja adyacente. Estas dos integrales se cancelan. Al sumar todos los flujos, las únicas integrales de flujo que sobreviven son las integrales sobre las caras que se aproximan al límite de $E$. A medida que los volúmenes de las cajas de aproximación se reducen a cero, esta aproximación se vuelve arbitrariamente cercana al flujo sobre $S$.
Antes de realizar nuestro primer ejercicio, practica con una escena interactiva, diseñada por el Grupo de Innovación Educativa MAMI de la Universidad Politécnica de Madrid, en la cual se observa el flujo a través de una superficie semiesférica. En la escena se presenta un campo constante (las flechas azules) y una semiesfera orientada en color gris, y se mide el flujo de ese campo sobre la semiesfera.
La posición de la semiesfera se puede mover arrastrando con el ratón el punto verde. Al cambiar la posición de la semiesfera el flujo cambia. Al aumentar el radio de la semiesfera el flujo aumenta (en valor absoluto). ¿Se puede colocar de alguna manera la semiesfera para que el flujo a través de ella sea nulo? Al marcar la casilla "Tapa" la semiesfera se cierra con un círculo en la parte inferior.
Verificación del Teorema de la Divergencia
Verifica el teorema de divergencia para el campo vectorial $\bold{F} = ⟨x - y, x + z, z - y⟩$ y la superficie $S$ que consta del cono $x^2 + y^2 = z^2, 0 \le z \le 1$, y la parte superior circular del cono (ver la siguiente figura). Supón que esta superficie está orientada positivamente.
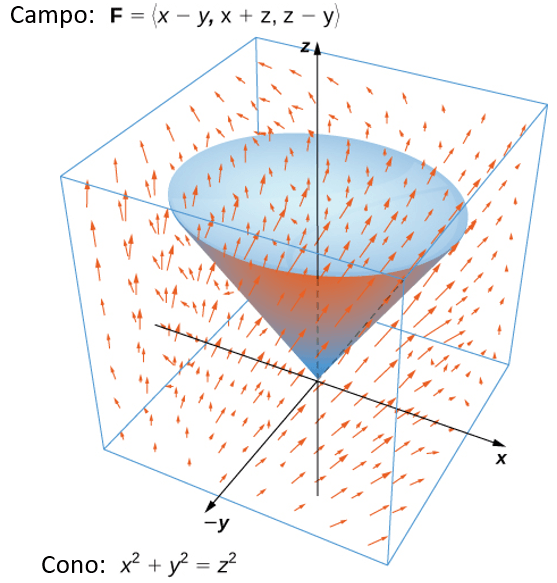
Recuerda que la divergencia del campo continuo $\bold{F}$ en el punto $P$ es una medida de la "salida" del campo en $P$. Si $\bold{F}$ representa el campo de velocidad de un fluido, entonces la divergencia se puede considerar como la tasa por unidad de volumen del fluido que sale menos la tasa por unidad de volumen que entra.
El teorema de divergencia confirma esta interpretación. Para ver esto, sea $P$ un punto y sea $B_r$ una bola de radio pequeño $r$ centrada en $P$ (). Sea $S_r$ la esfera límite de $B_r$. Dado que el radio es pequeño y $\bold{F}$ es continuo, $div\; \bold{F} (Q) \approx div\;\bold{F} (P)$ para todos los demás puntos $Q$ en la bola. Por lo tanto, el flujo a través de $S_r$ se puede aproximar usando el teorema de divergencia:
$$\iint_{S_r} \bold{F} ⋅ d\bold{S} = \iiint_{B_r} div \; \bold{F}dV \approx \iiint_{B_r} div \; \bold{F}(P)dV$$Dado que $div \; \bold{F}(P)$ es una constante
$$\iiint_{B_r} div \; \bold{F}(P)dV = div\;\bold{F}(P)V(B_r)$$Por lo tanto, el flujo $\iint_{S_r} \bold{F} ⋅ d\bold{S}$ se puede aproximar mediante $div\;\bold{F}(P) V (B_r)$. Esta aproximación mejora a medida que el radio se reduce a cero y, por lo tanto,
$$div\;\bold{F}(P) = \lim\limits_{r \to 0} \frac{1}{V(B_r)} \iint_{S_r} \bold{F} ⋅ d\bold{S}$$Esta ecuación dice que la divergencia en $P$ es la tasa neta de flujo hacia afuera del fluido por unidad de volumen.
El teorema de la divergencia se genera entre la integral de flujo de la superficie cerrada $S$ y una integral triple sobre el sólido encerrado por $S$. Por lo tanto, el teorema nos permite calcular integrales de flujo o integrales triples que normalmente serían difíciles de calcular al transformar la integral de flujo a una integral triple y viceversa.

Aplicando el Teorema de la Divergencia
Calcula la integral de superficie $\iint_S \bold{F} ⋅ d\bold{S}$, donde $S$ es el cilindro $x^2 + y^2 = 1, 0 \le z \le 2$, incluyendo la parte superior e inferior circulares, y $\bold{F} = \big⟨\frac{x^3}{3} + yz, \frac{y^3}{3} - sen (xz), z - x - y\big⟩$.
Aplicando el Teorema de la Divergencia
Sea $\bold{v} = ⟨-yz, xz, 0⟩$ el campo de velocidad de un fluido. Sea $C$ el cubo sólido dado por $1 \le x \le 4, 2 \le y \le 5, 1 \le z \le 4$, y sea $S$ el límite de este cubo (ver la siguiente figura). Encuentra el caudal del fluido a través de $S$.
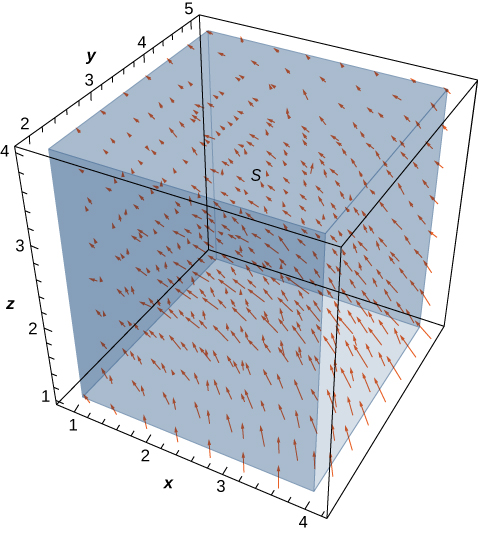
El ejercicio anterior ilustra una consecuencia notable del teorema de la divergencia. Sea $S$ una superficie cerrada lisa por partes y sea $\bold{F}$ un campo vectorial definido en una región abierta que contiene la superficie encerrada por $S$. Si $\bold{F}$ tiene la forma $\bold{F} = ⟨f(y, z), g (x, z), h (x,y)⟩$, entonces la divergencia de $\bold{F}$ es cero. Según el teorema de la divergencia, el flujo de $\bold{F}$ a través de $S$ también es cero. Esto hace que ciertas integrales de flujo sean increíblemente fáciles de calcular. Por ejemplo, supón que queremos calcular la integral de flujo $\iint_S\bold{F} ⋅ d\bold{S}$ donde $S $es un cubo y
$$\bold{F} = \big⟨sen(y)e^{yz}, x^2z^2, cos(xy)e^{sen\;x}\big⟩$$Calcular la integral de flujo directamente sería difícil, si no imposible, usando técnicas que estudiamos previamente. Como mínimo, tendríamos que dividir la integral de flujo en seis integrales, una para cada cara del cubo. Pero, debido a que la divergencia de este campo es cero, el teorema de divergencia muestra inmediatamente que la integral de flujo es cero.
Ahora podemos usar el teorema de la divergencia para justificar la interpretación física de la divergencia que discutimos anteriormente. Recuerda que si $\bold{F}$ es un campo vectorial tridimensional continuo y $P$ es un punto en el dominio de $\bold{F}$, entonces la divergencia de $\bold{F}$ en $P$ es una medida de la "salida" de $\bold{F}$ en $P$. Si $\bold{F}$ representa el campo de velocidad de un fluido, entonces la divergencia de $\bold{F}$ en $P$ es una medida de la tasa de flujo neto fuera del punto $P$ (el flujo de fluido fuera de $P$ menos el flujo de fluido hacia $P$). Para ver cómo el teorema de la divergencia justifica esta interpretación, sea $B_r$ una bola de radio $r$ muy pequeño con centro $P$, y supón que $B_r$ está en el dominio de $\bold{F}$. Además, supón que $B_r$ tiene una orientación positiva hacia afuera. Dado que el radio de $B_r$ es pequeño y $\bold{F}$ es continuo, la divergencia de $\bold{F}$ es aproximadamente constante en $B_r$. Es decir, si $P'$ es cualquier punto en $B_r$, entonces $div\; \bold{F} (P) \approx div\;\bold{F} (P')$. Sea $S_r$ la esfera límite de $B_r$. Podemos aproximar el flujo a través de $S_r$ usando el teorema de divergencia de la siguiente manera:
$$\begin{aligned} \iint_{S_r} \bold{F} ⋅ d\bold{S} &= \iiint_{B_r} div\;\bold{F} dV\\ &= \iiint_{B_r} div\;\bold{F}(P) dV\\ &= div\; \bold{F}(P)V(B_r) \end{aligned}$$A medida que reducimos el radio $r$ a cero mediante un límite, la cantidad $div\; \bold{F}(P)V(B_r)$ se acerca arbitrariamente al flujo. Por lo tanto,
$$div\; \bold{F}(P) = \lim\limits_{r \to 0} \frac{1}{V(B_r)}\iint_{S_r} \bold{F} ⋅ d\bold{S}$$y podemos considerar la divergencia en $P$ como una medida de la tasa neta de flujo hacia afuera por unidad de volumen en $P$. Dado que "salida" es un término informal para la tasa neta de flujo hacia afuera por unidad de volumen, hemos justificado la interpretación física de la divergencia que discutimos anteriormente, y hemos utilizado el teorema de la divergencia para dar esta justificación.
El teorema de la divergencia tiene muchas aplicaciones en física e ingeniería. Nos permite escribir muchas leyes físicas tanto en una forma integral y una forma diferencial (de la misma manera que el teorema de Stokes nos permitió una forma integral y diferencial de la ley de Faraday). Las áreas de estudio como la dinámica de fluidos, el electromagnetismo y la mecánica cuántica tienen ecuaciones que describen la conservación de la masa, el momento o la energía, y el teorema de la divergencia nos permite dar estas ecuaciones tanto en forma integral como diferencial.
Una de las aplicaciones más comunes del teorema de la divergencia es en los campos electrostáticos. Un resultado importante en este tema es la ley de Gauss. Esta ley establece que si $S$ es una superficie cerrada en el campo electrostático $E$, entonces el flujo de $E$ a través de $S$ es la carga total encerrada por $S$ (dividida por una constante eléctrica).
Ahora usamos el teorema de la divergencia para justificar el caso especial de esta ley en el que el campo electrostático es generado por una carga puntual estacionaria en el origen.
Si $(x, y, z)$ es un punto en el espacio, entonces la distancia desde el punto hasta el origen es $r = \sqrt{x^2 + y^2 + z^2}$. Sea $\bold{F}_r$ el campo vectorial radial $\bold{F}_r = \frac{1}{r^2} \big⟨\frac{x}{r}, \frac{y}{r}, \frac{z}{r}\big⟩$. El vector en una posición dada en el espacio apunta en la dirección del vector radial unitario $\big⟨\frac{x}{r}, \frac{y}{r}, \frac{z}{r}\big⟩$ y se escala por la cantidad $1 / r^2$. Por lo tanto, la magnitud de un vector en un punto dado es inversamente proporcional al cuadrado de la distancia del vector al origen. Suponga que tenemos una carga estacionaria de $q$ culombios en el origen, que existe en el vacío. La carga genera un campo electrostático $E$ dado por
$$\bold{E} = \frac{q}{4πϵ_0}\bold{F}_r $$donde la aproximación $ϵ_0 = 8.854 × 10^{-12}\; farad (F) / m$ es una constante eléctrica (la constante $ϵ_0$ es una medida de la resistencia que se encuentra al formar un campo eléctrico en el vacío). Observa que $E$ es un campo vectorial radial similar al campo gravitacional. La diferencia es que este campo apunta hacia afuera mientras que el campo gravitacional apunta hacia adentro. Porque
$$\bold{E} = \frac{q}{4πϵ_0} \bold{F}_r = \frac{q}{4πϵ_0}\bigg(\frac{1}{r^2}\big⟨\frac{x}{r}, \frac{y}{r}, \frac{z}{r}\big⟩\bigg)$$decimos que los campos electrostáticos obedecen a una ley del cuadrado inverso. Es decir, la fuerza electrostática en un punto dado es inversamente proporcional al cuadrado de la distancia desde la fuente de la carga (que en este caso está en el origen).
Dado este campo vectorial, mostramos que el flujo a través de la superficie cerrada $S$ es cero si la carga está fuera de $S$, y que el flujo es $q /ϵ_0$ si la carga está dentro de $S$. En otras palabras, el flujo a través de $S$ es la carga dentro de la superficie dividida por la constante $ϵ_0$. Este es un caso especial de la ley de Gauss, y aquí usamos el teorema de la divergencia para justificar este caso especial.
Para mostrar que el flujo a través de $S$ es la carga dentro de la superficie dividida por la constante $ϵ_0$, necesitamos dos pasos intermedios. Primero mostramos que la divergencia de $\bold{F}_r$ es cero y luego mostramos que el flujo de $\bold{F}_r$ a través de cualquier superficie lisa $S$ es cero o $4π$. Entonces podemos justificar este caso especial de la ley de Gauss.
La divergencia de $\bold{F}_r$ es cero
Verifica que la divergencia de $\bold{F}_r$ sea cero donde $\bold{F}_r$ está definido (lejos del origen).
Observa que dado que la divergencia de $\bold{F}_r$ es cero y $\bold{E}$ es $\bold{F}_r$ escalado por una constante, la divergencia del campo electrostático $\bold{E}$ también es cero (excepto en el origen).
Flujo a través de una superficie lisa
Sea $S$ una superficie cerrada lisa, conectada por partes y sea $\bold{F}_r = \frac{1}{r^2} \big⟨\frac{x}{r}, \frac{y}{r}, \frac{z}{r}\big⟩$. Luego,
$$\iint_S \bold{F}_r ⋅ d\bold{S} = \begin{cases} 0 &\text{si S no incluye el origen } \\ 4π &\text{si S abarca el origen } \end{cases}$$En otras palabras, este teorema dice que el flujo de $\bold{F}_r$ a través de cualquier superficie $S$ cerrada lisa a trozos depende solo de si el origen está dentro de $S$.
Primero, supón que $S$ no incluye el origen. En este caso, el sólido encerrado por $S$ está en el dominio de $\bold{F}_r$, y dado que la divergencia de $\bold{F}_r$ es cero, podemos aplicar inmediatamente el teorema de la divergencia y encontrar que $\iint_S \bold{F} ⋅ d\bold{S}$ es cero.
Ahora supón que $S$ abarca el origen. No podemos simplemente usar el teorema de la divergencia para calcular el flujo, porque el campo no está definido en el origen. Sea $S_a$ una esfera de radio $a$ dentro de $S $centrada en el origen. El campo vectorial normal hacia afuera en la esfera, en coordenadas esféricas, es
$$\bold{t}_{ϕ} × \bold{t}_{θ} = ⟨a^2cos\; θ sen^2ϕ, a^2sen\; θ sen^2ϕ, a^2sen\; ϕ cos\; ϕ ⟩$$Por lo tanto, en la superficie de la esfera, el producto escalar $\bold{F}_r ⋅ \bold{N}$ (en coordenadas esféricas) es
$$\begin{aligned} \bold{F}_r ⋅ \bold{N} &= \bigg⟨\frac{sen\;ϕ cos\;θ}{a^2}, \frac{sen\;ϕ sen\;θ}{a^2}, \frac{cos\;ϕ}{a^2}\bigg⟩ ⋅ \big⟨a^2cos\;θ sen^2ϕ, a^2sen\; θ sen^2ϕ,\\ &\;\;\;\;\;a^2sen\; ϕ cos\; ϕ\big⟩\\ &= sen\;ϕ(⟨sen\; ϕ cos\; θ, sen \;ϕ sen\; θ, cos\; ϕ ⟩ ⋅ ⟨sen\; ϕ cos\; θ, sen\; ϕ sen\; θ, cos\; ϕ ⟩\\ &= sen\;ϕ \end{aligned}$$El flujo de $\bold{F}_r$ a través de $S_a$ es
$$\iint_{S_a} \bold{F}_r ⋅ \bold{N}dS = \int_0^{2π}\int_0^{π} sen\;ϕ dϕ dθ = 4π$$Ahora, recuerda que nos interesa el flujo a través de $S$, no necesariamente el flujo a través de $S_a$. Para calcular el flujo a través de $S$, sea $E$ el sólido entre las superficies $S_a$ y $S$. Entonces, el límite de $E$ consiste en $S_a$ y $S$. Denota este límite con $S - S_a$ para indicar que $S$ está orientado hacia afuera pero ahora $S_a$ está orientado hacia adentro. Nos gustaría aplicar el teorema de la divergencia al sólido $E$. Observa que el teorema de la divergencia, como se indicó, no puede manejar un sólido como $E$ porque $E$ tiene un agujero.
Sin embargo, el teorema de la divergencia se puede extender para manejar sólidos con agujeros, al igual que el teorema de Green se puede extender para manejar regiones con agujeros. Esto nos permite usar el teorema de la divergencia de la siguiente manera.
$$\begin{aligned} \iint_{S-S_a} \bold{F}_r ⋅ d\bold{S} &= \iint_{S} \bold{F}_r ⋅ d\bold{S} - \iint_{S_a} \bold{F}_r ⋅ d\bold{S}\\ &= \iiint_E div\; \bold{F}_rdV\\ \end{aligned}$$Por lo tanto
$$\iint_{S} \bold{F}_r ⋅ d\bold{S} = \iint_{S_a} \bold{F}_r ⋅ d\bold{S} = 4π$$y tenemos el resultado deseado. Ahora volvemos a calcular el flujo a través de una superficie lisa en el contexto del campo electrostático $\bold{E} = \frac{q}{4πϵ_0}\bold{F}_r$ de una carga puntual en el origen. Sea $S$ una superficie cerrada lisa a trozos que abarca el origen. Luego
$$\begin{aligned} \iint_S \bold{E} ⋅ d\bold{S} &= \iint_S \frac{q}{4πϵ_0}\bold{F}_r ⋅ d\bold{S}\\ &= \frac{q}{4πϵ_0} \iint_S \bold{F}_r ⋅ d\bold{S}\\ &= \frac{q}{ϵ_0} \end{aligned}$$Si $S$ no incluye el origen, entonces
$$\iint_S \bold{E} ⋅ d\bold{S} = \frac{q}{4πϵ_0}\iint_S \bold{F}_r ⋅ d\bold{S} = 0$$Por lo tanto, hemos justificado la afirmación que nos propusimos justificar: el flujo a través de la superficie cerrada $S $es cero si la carga está fuera de $S$, y el flujo es $q/ϵ_0$ si la carga está dentro de $S$.
Este análisis solo funciona si hay una carga puntual única en el origen. En este caso, la ley de Gauss dice que el flujo de $\bold{E}$ a través de $S$ es la carga total encerrada por $S$.
La ley de Gauss puede extenderse para manejar múltiples sólidos cargados en el espacio, no solo una carga puntual en el origen. La lógica es similar al análisis anterior, pero más allá del alcance de este texto. En total generalidad, la ley de Gauss establece que si $S$ es una superficie cerrada lisa por partes y $Q $es la cantidad total de carga dentro de $S$, entonces el flujo de $E$ a través de $S$ es $Q / ϵ_0$.
En la siguiente escena interactiva, diseñada por Juan Guillermo Rivera Berrío, ajusta la magnitud de la carga y el radio de la superficie gaussiana a su alrededor. Observa cómo esto afecta el flujo total y la magnitud del campo eléctrico en la superficie gaussiana.
Las flechas representan la magnitud y dirección del campo eléctrico generado por la partícula. Puedes cambiar el radio de la superficie gaussiana y la carga. Puedes, también, rotar el cubo con clic sostenido.
Usando la ley de Gauss
Supón que tenemos cuatro cargas puntuales estacionarias en el espacio, todas con una carga de $0.002 \text{ Coulombs (C)}$. Las cargas están ubicadas en $(0, 1, 1), (1, 1, 4), (-1, 0, 0)$ y $(-2, -2, 2)$. Sea $\bold{E}$ el campo electrostático generado por estas cargas puntuales. Si $S$ es la esfera de radio $2 $ orientada hacia afuera y centrada en el origen, entonces encuentre $\iint_S\bold{E} ⋅ d\bold{S}$.
Una última escena interactiva de PhET Simulaciones, mueve las cargas positivas y negativas alrededor del campo eléctrico.
Para los siguientes ejercicios, usa un sistema algebraico computarizado (CAS) y el teorema de divergencia para evaluar la integral de superficie $\int_S\bold{F} ⋅ \bold{n} ds$ para la elección dada de $\bold{F}$ y la superficie límite $S$. Para cada superficie cerrada, supón que $\bold{N}$ es el vector normal unitario externo.
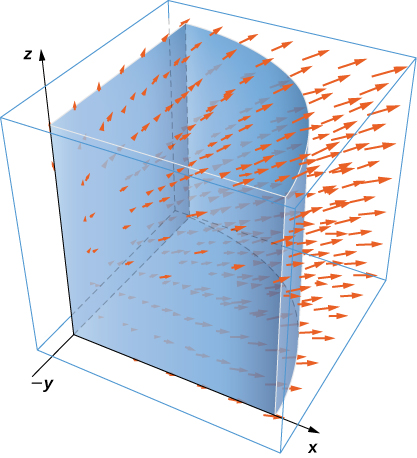
Para los siguientes ejercicios, usa un CAS junto con el teorema de la divergencia para calcular el flujo neto hacia afuera para los campos a través de las superficies dadas $S$.
Para los siguientes ejercicios, usa un CAS y el teorema de la divergencia para calcular el flujo externo neto para los campos vectoriales a través del límite de las regiones dadas $D$.


Para los siguientes ejercicios, la ley de transferencia de calor de Fourier establece que el vector de flujo de calor $\bold{F}$ en un punto es proporcional al gradiente negativo de la temperatura; es decir, $\bold{F} = -k∇ T$, lo que significa que la energía térmica fluye de regiones calientes a regiones frías. La constante $k \gt 0$ se llama conductividad, que tiene unidades métricas de julios por metro por segundo-kelvin o vatios por metro-kelvin. Se da una función de temperatura para la región $D$. Usa el teorema de la divergencia para encontrar el flujo de calor neto hacia el exterior $\iint_S \bold{F} ⋅ \bold{N}dS = -k \iint_S ∇ T ⋅ \bold{N}dS$ a través del límite $S$ de $D$, donde $k = 1$.

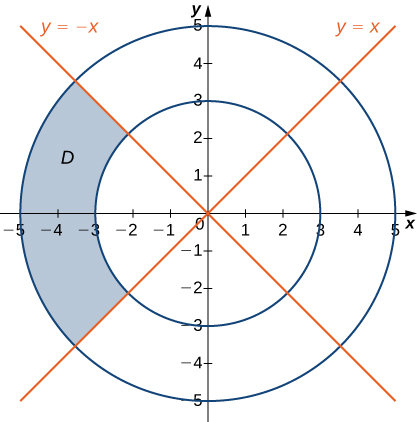
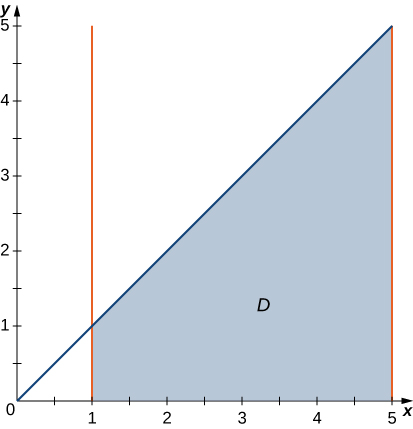
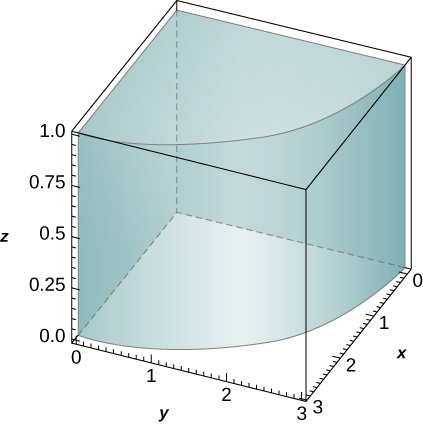
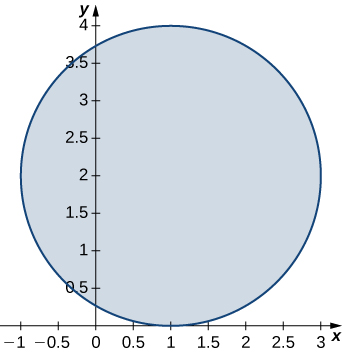

{kind=link}
{kind=link}
{kind=link}
{kind=link}